
重型半挂车简化模型参数辨识研究*
2015-04-12 06:34聂枝根宗长富
汽车工程 2015年6期
聂枝根,宗长富
(吉林大学,汽车仿真与控制国家重点实验室,长春 130022)
2015111
重型半挂车简化模型参数辨识研究*
聂枝根,宗长富
(吉林大学,汽车仿真与控制国家重点实验室,长春 130022)
为准确表征重型半挂车的动态特性,在建立3和5自由度简化模型基础上,利用Trucksim数据并运用双模型与遗传算法相结合的方法对简化模型关键参数进行了辨识。利用辨识后的关键参数的MAP图,进行了模型动态工况的仿真。仿真结果与Trucksim数据对比表明:采用此方法辨识出的关键参数MAP图能够满足重型半挂车简化模型表征车辆实际状态的要求,为车辆稳定性控制奠定了基础。
重型半挂车;动力学模型;参数辨识;遗传算法
前言
重型半挂车具有运输量大、成本低、高效和经济的优势,在货物运输中得到广泛应用[1]。但由于载质量大,尺寸大,质心高,且牵引车和半挂车之间相互耦合,极易发生侧翻、摆振和折叠等事故,造成巨大损失[2]。因此,进行重型半挂车稳定性研究具有重要意义。重型半挂车稳定性控制依赖重型半挂车简化模型的建立和模型中关键参数值的确定[3-5]。据此,在建立简化线性模型基础上,根据重型半挂汽车实时工况精确辨识出具有非线性特性的模型关键参数以获得重型半挂车的实时状态,成为准确控制车辆稳定的关键[5]。
在文献[6]中,进行了几个侧向加速度下模型关键参数的标定,但无法实现模型参数随车辆状态变化而实时变化;在文献[7]中进行了不同转向盘和车速下关键参数的辨识,但使用试凑方法进行辨识,难以保证模型关键参数的准确性,且文献[6]和文献[7]中都是针对单车模型参数的辨识。总的来说,对重型半挂车在非线性区和大侧向加速度(对于重型半挂车,侧向加速度大于0.25g即进入非线性区)辨识的研究较少。参数辨识的方法很多,但主要采用以下4类:最小二乘法、梯度校正法、极大似然法和遗传算法。最小二乘法存在数据饱和的问题[8],以致辨识参数易陷入局部最优解;梯度校正法要求优化对象的梯度存在;极大似然法须写出输出量条件概率密度函数;遗传算法存在同时优化过多参数、准确性差的缺点[9]。因此,上述辨识方法不能完全满足参数辨识对准确性的要求[10]。
本文中利用双模型与遗传算法相结合的方法离线辨识简化模型的关键参数,并利用离线辨识后的参数值绘制出关键参数MAP图。双模型与遗传算法结合的方法继承了遗传算法全局寻优的优点,又克服了遗传算法同时优化多个参数不够准确的缺点,能够成功辨识出准确性高的简化模型关键参数值。根据车辆的实时状态,通过分段线性插值关键参数MAP能够获得实时参数值。实时参数结合重型半挂车5自由度线性简化动力学模型可实时表征车辆实际状态,并解决简化模型准确表征非线性区和大侧向加速度下与车辆实际特性不一致的问题,为参数估计和动态车辆稳定性的控制奠定了基础。
首先建立了重型半挂车3自由度和5自由度简化模型;然后,在简化模型的基础上,使用双模型与遗传算法结合的方法离线辨识简化模型的关键参数,并利用辨识后的参数值绘制参数MAP图;最后,利用参数MAP图和5自由度简化模型进行了仿真对比研究。
1 重型半挂车3,5自由度简化模型建立
为实现重型半挂车包括侧翻控制在内的稳定控制,须建立简化模型,并且对简化模型中的关键参数进行辨识。根据简化模型参数辨识的需要,本文中建立了重型半挂车3自由度横摆模型和重型半挂车5自由度横摆侧倾模型。鉴于篇幅的限制,只对5自由度横摆侧倾模型进行推导,3自由度模型直接给出状态空间标准形式。
1.1 重型半挂车5自由度横摆侧倾简化模型
5自由度横摆侧倾简化模型由牵引车和半挂车两个刚体组成,其5自由度分别为牵引车质心侧偏角、牵引车横摆和侧倾、半挂车横摆和侧倾[1,11]。在建立动力学模型时做了如下假设:
(1) 忽略转向系统的影响,以前轮(转向轮)转角作为模型输入;
(2) 不考虑空气动力的作用和路面坡度;
(3) 忽略左、右轮胎载荷的变化对轮胎特性和轮胎回正力矩的影响;
(4) 纵向速度恒定;
(5) 牵引车和半挂车没有俯仰运动;
(6) 在轮胎上没有制动力;
(7) 牵引车和半挂车之间的铰接角较小;
(8) 牵引车两个驱动轴简化为单轴,并且等效轴的位置为几何中心;
(9) 半挂车3个半挂轴简化成单轴,并且等效轴的位置为其几何中心。
图1和图2分别为重型半挂车横摆运动和侧倾运动示意图,据此进行了重型半挂车简化模型运动学方程的如下推导。
牵引车运动学方程为
F1+F2+F4
(1)
(2)
k12(φ2-φ1)-F4h1c
(3)
半挂车运动学方程为
(4)
(5)
(6)
半挂车和牵引车的运动学约束方程为
(7)
本文中采用线性轮胎模型,车辆各轴的侧向力为轴侧偏刚度与该等效侧偏角之积:
(8)
经过整理后得到重型半挂车5自由度横摆侧倾简化模型状态方程的标准表达式为
(9)
式中
B=M-1[-(c+a)k1-k1h1c-k100000]T
1.2 重型半挂车3自由度横摆模型
重型半挂车3自由度横摆模型的状态方程标准表达式为
(10)
式中
B=M-1[-k1(a+c) -k10 0]T
上述公式中各参数符号的含义见表1。
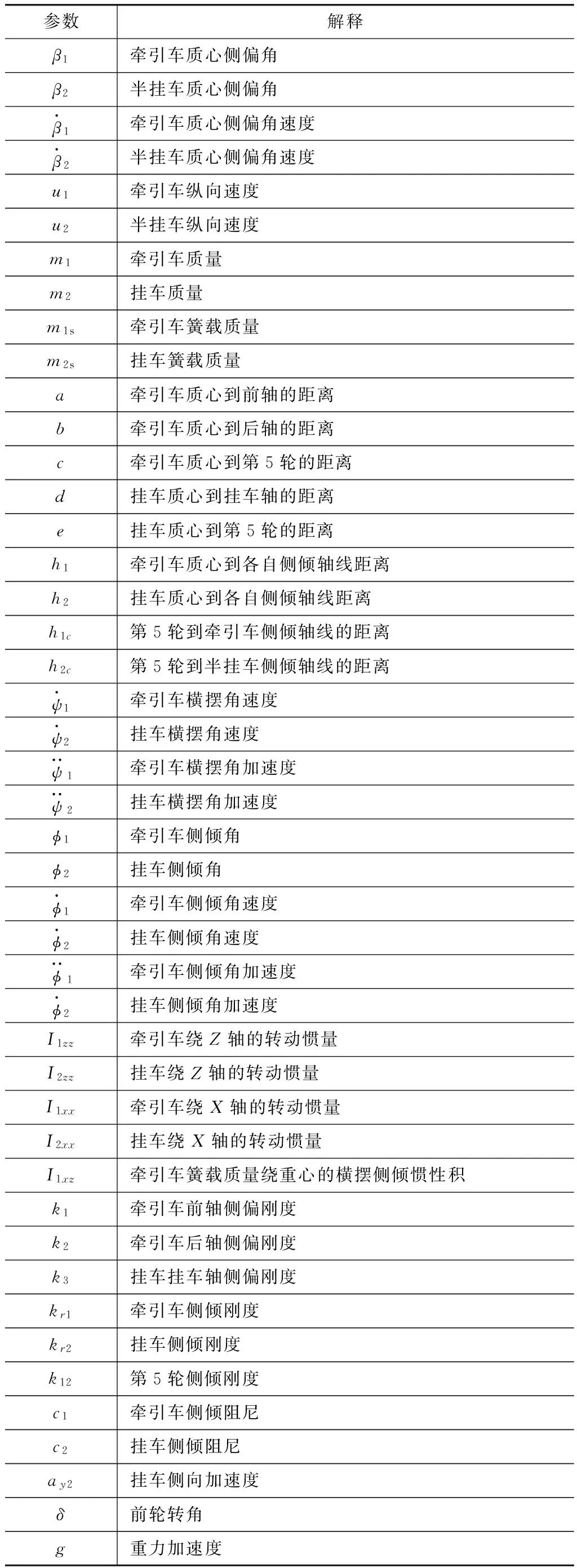
表1 两模型式中参数符号意义
2 重型半挂车简化模型参数辨识
为实现简化模型表征实际车辆的特征,本文中利用Trucksim数据,应用双模型和遗传算法相结合的方法离线辨识简化模型的关键参数,包括牵引车前后轴侧偏刚度、挂车轴侧偏刚度、牵引车侧倾刚度和半挂车侧倾刚度。辨识后的关键参数值为等效值,包括车辆转向系统、悬架系统、轮胎定位和轮胎等系统和部件的非线性特性。
首先,利用3自由度模型和遗传算法辨识出牵引车的前后轴侧偏刚度和挂车轴侧偏刚度,并将其代入5自由度模型中;然后利用5自由度模型和遗传算法,辨识出牵引车侧倾刚度和半挂车侧倾刚度。这样既可利用遗传算法的全局寻优能力,又可克服其同时优化过多参数而不准确的缺点。
本文中采用阶跃工况对模型关键参数进行辨识,工况覆盖了车速从低速到高速、从线性到非线性的全工况。按车速和转向盘转角预设出需要的辨识工况点,进而对工况点进行参数辨识以绘制参数MAP图,再利用MAP图分段线性插值得到任意车速和转向盘转角下的模型关键参数值,保证了简化模型关键参数值能够随车辆状态实时变化。
2.1 遗传算法辨识
遗传算法是模仿自然界生物进化机制发展起来的随机全局搜索和优化方法[7],其主要特点是群体搜索策略和群体中个体之间的信息交换,搜索不依赖于梯度信息,并逐一比对所有可行解的目标值,具有全局优化能力,尤其适用于处理传统搜索方法难于解决的复杂和不确定性问题[12]。
本文中遗传算法使用二进制编码、轮盘赌选择、均匀交叉、基本位变异、搜索空间限定法约束处理。利用3自由度横摆模型,进行牵引车前后轴和挂车轴侧偏刚度辨识,利用数据为质心侧偏角和横摆角速度,其适用度函数为式(11)(适用度函数参数解释见表2);利用5自由度横摆模型,进行牵引车侧倾刚度和半挂车侧倾刚度辨识,利用数据为侧倾角和侧倾角速度数据,其适用度函数为式(12)(适用度函数参数解释见表2)。由于篇幅有限,具体遗传算法程序编写参考了文献[9]。
(11)
(12)
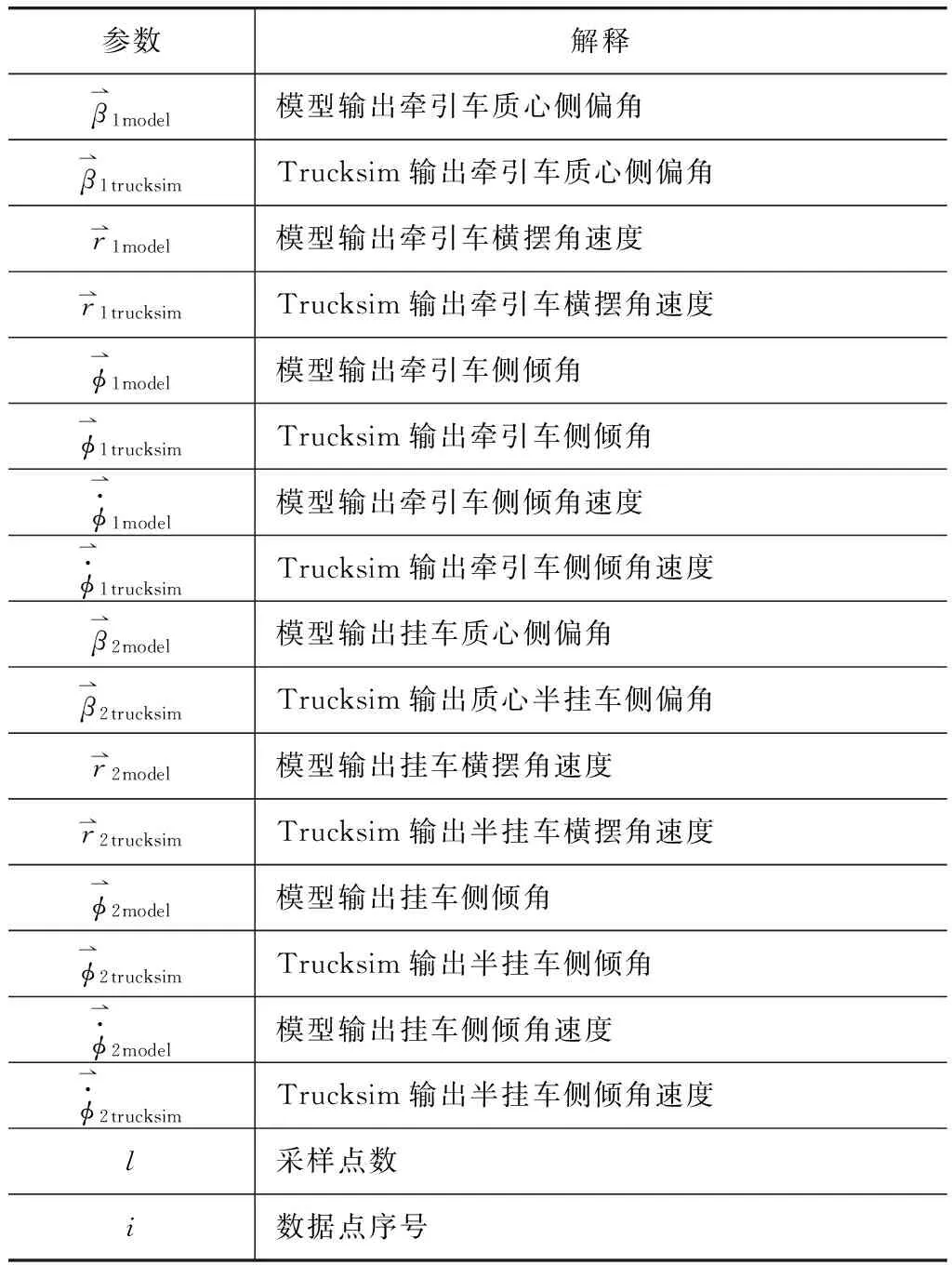
表2 适用度函数参数的含义
2.2 不同工况下的参数辨识
由于重型半挂车实车实验困难,且针对稳定性控制实验尤为危险,较难进行实车实验。故利用Trucksim软件数据进行参数辨识。Trucksim软件被认为是较为接近实车的整车仿真模型。以Trucksim某重型半挂车(具体参数见表3)不同转向盘转角在车速80km/h条件下和转向盘转角为60°在不同车速条件下为例对模型关键参数进行了辨识。辨识完成后,把辨识出的模型关键参数代入5自由度模型进行仿真,并进行仿真数据与Trucksim数据对比。最后,对辨识出的模型关键参数与转向盘转角和车速的关系进行了分析。

表3 车辆参数
2.2.1 车速80km/h和变转向盘转角
在80km/h、-40°转向盘转角阶跃工况中,通过3自由度横摆模型辨识出的牵引车前轴侧偏刚度为-287 500N/rad,牵引车后轴侧偏刚度值为-492 880N/rad,挂车轴侧偏刚度为-343 970N/rad;把轴刚度值代入5自由度模型,并辨识出的牵引车侧倾刚度为2 020 700N·m/rad,挂车侧倾刚度为758 580N·m/rad。参数代入模型得出的数据与Trucksim数据对比见图3。
在80km/h、-60°转向盘转角阶跃工况中,通过3自由度横摆模型辨识出的牵引车前轴侧偏刚度为-286 430N/rad,牵引车后轴侧偏刚度值为-491 540N/rad,挂车轴侧偏刚度为-333 890N/rad;把轴刚度值代入5自由度模型,并辨识出的牵引车侧倾刚度为1 623 700N·m/rad,挂车侧倾刚度为910 690N·m/rad。参数代入模型得出的数据与Trucksim数据对比见图3。
由图3可知,在车速80km/h,转向盘转角-40°和-60°工况下,辨识出的参数能很好地表征车辆实际状态。通过线性插值出此车速下-50°转向盘工况的参数值:牵引车前轴侧偏刚度为-286 965N/rad,牵引车后轴侧偏刚度值为-492 210N/rad,挂车轴侧偏刚度为-338 930N/rad,牵引车侧倾刚度为1 822 200N·m/rad,挂车侧倾刚度为834 635N·m/rad。参数代入模型得出的数据与Trucksim数据对比见图3。
2.2.2 60°转向盘转角和变车速
在40km/h、60°转向盘转角阶跃工况中,通过3自由度横摆模型辨识出的牵引车前轴侧偏刚度为-283 980N/rad,后轴侧偏刚度值为-485 320N/rad,挂车轴侧偏刚度为-351 550N/rad;把轴刚度值代入5自由度模型,并辨识出的牵引车侧倾刚度为2 810 500N·m/rad,挂车侧倾刚度为741 740N·m/rad。参数代入模型得出的数据与Trucksim数据对比见图4。
在60km/h、60°转向盘转角阶跃工况中,通过3自由度横摆模型辨识出的牵引车前轴侧偏刚度为-269 160N/rad,后轴侧偏刚度值为-479 950N/rad,挂车轴侧偏刚度为-345 720N/rad;把轴刚度值代入5自由度模型,并辨识出的牵引车侧倾刚度为2 057 900N·m/rad,挂车侧倾刚度为743 810N·m/rad。参数代入模型得出的数据与Trucksim数据对比见图4。
由图4可知,在转向盘转角60°,车速40和60km/h工况下,辨识出的参数能够很好地表征车辆实际状态。通过前面车速40和60km/h工况辨识得出的参数值,线性插值出此转向盘转角下50km/h车速工况的参数值:牵引车前轴侧偏刚度为-276 570N/rad,牵引车后轴侧偏刚度值为-482 635N/rad,挂车轴侧偏刚度为-348 635N/rad,牵引车侧倾刚度为2 434 200N·m/rad,挂车侧倾刚度为742 775N·m/rad。参数代入模型得出的数据与Trucksim数据对比见图4。
由图3和图4可知,通过双模型与遗传算法结合的方法离线辨识的简化模型关键参数,可以较准确地描述车辆的动力学特性。并且通过线性插值得到参数值,代入模型也能够准确地表征车辆实际状态。因此,参数值变化与车速和转向盘转角的变化存在直接关系。鉴于此,选取车速和转向盘转角为自变量绘制参数MAP图。同时,发现由于重型半挂车第5轮等因素影响,挂车侧倾刚度变化较为剧烈。
2.3 辨识MAP图
当车速在20km/h以下,车辆不易出现危险工况;在中高速、转向盘转角300°时车辆已经侧翻。因此,绘制MAP图选择车速从20km/h到100km/h,转向盘转角从-300°到300°转角范围来设定工况点。另外,考虑到低速参数变化复杂和低速不易出现失稳,车速从0到20km/h范围内,参数MAP图采用了参数值为20km/h工况下的值;当车辆出现侧翻后,MAP图中的参数值赋值为零,具体MAP图见图5。
由图5(a)~图5(c)可知,在同一转向盘转角下,轴侧偏刚度随着车速增大而减小;在同一车速下,轴侧偏刚度随着转向盘转角绝对值增大而减小。针对轴侧偏刚度,辨识出的参数MAP图符合文献[13]中的基本理论,即侧向加速度增大,垂直载荷转移率增大,平均侧偏刚度变小;侧向加速度越大,载荷转移率越大,平均侧偏刚度越小。需要指出,因转向系统原因,在小转向盘转角且低速区域内,牵引车前轴侧偏刚度与上面的趋势相反。
由图5(d)可知,在同一车速下,牵引车侧倾刚度随着转向盘转角绝对值增大而减小。在较小的转向盘转角区域内,侧倾刚度随着车速增大而增大。其他转角区域内,牵引车侧倾刚度随着车速增大而减小。
由图5(e)可知,在中等车速和中等转向盘转角区域内,存在较小的挂车侧倾刚度值,其他区域朝着这个区域减小。
图5(d)和图5(e)中的参数变化规律与在牵引车侧倾角和半挂车侧倾角相差较小时,第5轮侧倾刚度值为零有直接关系。
3 结果验证
为大范围验证辨识方法和辨识结果的准确性,设计一个测试工况:在20s时间内,重型半挂车车速从65减至25km/h,且转向盘转角做频率为0.1Hz、振幅为90°的正弦转动。此工况涵盖了从低速到中高速、从小转向盘转角到大转向盘转角和从小侧向加速度到大侧向加速度的整个过程。重型半挂车5自由度横摆侧倾简化模型利用参数MAP图,结合车速变化(图6(a))和转向盘转角变化(图6(b))进行仿真,仿真结果见图6。其中,重型半挂车5自由度横摆侧倾简化模型的实时关键参数值是根据实时车速和转向盘转角分段线形插值参数MAP获得,分段节点为辨识工况点。
由图6可知,牵引车的侧向加速度接近0.37g,此时前轮即将离地达到模型的极限。由仿真数据与Trucksim数据对比可知,在车速和转向盘转角动态输入下,模型运行得到的车辆特性与实际车辆特性具有良好一致性。因此,运用双模型与遗传算法结合的方法能够辨识出准确的牵引车前后轴侧偏刚度、挂车轴侧偏刚度、牵引车等效侧倾刚度和挂车等效侧倾刚度等简化模型关键参数,且以车速20km/h和转向盘转角20°为间隔形成的简化模型关键参数MAP能够实时表征具有非线性的车辆动态特性。
4 结论
(1) 针对重型半挂车稳定控制要求,建立了适合控制器要求的简化模型,提出了运用双模型与遗传算法结合的方法离线辨识简化模型关键参数。通过模型数据与Trucksim数据对比,表明此方法能够准确辨识出模型的关键参数。
(2) 以车速和转向盘转角作为自变量绘制了关键参数MAP图,并利用参数MAP图,结合重型半挂车5自由度横摆侧倾简化模型,对车辆动态工况进行仿真。仿真结果与Trucksim数据吻合度较好,表明参数值MAP能够实时准确地表征车辆实际动态特性,为重型半挂车参数估计和稳定性控制奠定了良好基础。
[1] Cheng Caizhen. Enhancing Safety of Actively-steered Articulated Vehicles[D]. Cambridge: University of Cambridge,2009.
[2] 朱天军.基于改进TTR重型车辆侧翻预警及多目标稳性控制算法研究[D].长春:吉林大学,2010.
[3] Daniel Wesemeier, RolfIsermann. Identification of Vehicle Parameters Using Stationary Driving Maneuvers[J]. Control Engineering Practice,2009,17:1426-1431.
[4] Manoj Karkee, Brian L Steward. Parameter Estimation and Validation of a Tractor and Single Axle Towed Implement Dynamic System Model[J]. Computers and Electronics in Agriculture,2011,77:135-146.
[5] Saglam F, Unlusoy Y S. Identification of Order Vehicle Handing Models from Multibody Vehicle Dynamics Models[C].Proceedings of 2011 IEEE International on Mechatronics, Istanbul Turkey April 13-15,2011.
[6] 麦莉,宗长富,王化吉,等.重型半挂车侧翻预测模型试验标定方法[J].吉林大学学报(工学版),2010,40(9):60-65.
[7] Yu H, Guvenc L, Ozguner U. Heavy Duty Vehicle Rollover Detection and Active Roll Control[J]. Vehicle System Dynamics,2008,46(6):451-470.
[8] 李鹏波,胡德文,张纪阳,等.系统辨识[M].北京:中国水利水电出版社,2010.
[9] 雷英杰,张善文,李续武,等.MATLAB遗传算法工具箱及应用[M].西安:西安电子科技大学出版社,2006.
[10] Gerald Steiner, Bernhard Schweighofer. Parameter Identification for a Complex Lead-acid Battery Model by Combining Fuzzy Control and Stochastic Optimization[J]. Inverse Problems in Science and Engineering,2006,14(6):665-685.
[11] Selim Solmaz, Martin Corless, Robert Shortten. A Methodology for the Design of Robust Rollover Prevention Controllers for Automotive Vehichles with Active Steering[J]. International Journal of Control,2006,23(11):1-21.
[12] Cabrera J A, Ortiz A, Carabias E, et al. Ana-ltertive Method to Determine the Magic Tyre Model Parameters Using Genetic Algorithms[J]. Vehicle System Dynamics,2004,41(2):109-127.
[13] 余志生.汽车理论(第三版)[M].北京:机械工业出版社,2004.
A Study on the Parameters Identification ofSimplified Models for Articulated Heavy Vehicles
Nie Zhigen & Zong Changfu
JilinUniversity,StateKeyLaboratoryofAutomotiveSimulationandControl,Changchun130022
In order to accurately describe the dynamic characteristics of articulated heavy vehicles, their 3-DOF and 5-DOF simplified models are established, and based on Trucksim data the key parameters of simplified models are identified by using genetic algorithm combined with double models. A simulation on the models in dynamic conditions is carried out with the MAPs of key identified parameters. The comparisons of simulation results with Trucksim data indicate that the MAPs of key identified parameters meet the requirements of the simplified models for articulated heavy vehicles in characterizing the actual state of vehicle, laying a foundation for vehicle stability control.
articulated heavy vehicles; dynamics models; parameters identification; genetic algorithm
*国家自然科学基金(51075176)资助。
原稿收到日期为2013年5月28日,修改稿收到日期为2013年11月14日。
猜你喜欢
商用汽车(2022年7期)2022-10-11
北京汽车(2021年2期)2021-05-07
兵器装备工程学报(2020年1期)2020-03-05
小资CHIC!ELEGANCE(2019年20期)2019-07-02
汽车维修与保养(2019年1期)2019-05-05
汽车电器(2018年12期)2019-01-04
专用汽车(2018年10期)2018-11-02
中国建筑金属结构(2018年4期)2018-05-23
汽车维护与修理(2018年1期)2018-04-04
作文周刊·小学一年级版(2017年27期)2017-08-10
