基于X 射线脉冲星的月球卫星自主导航
2015-04-11 10:12:36吴盘龙陈尚敏
电光与控制 2015年9期
姚 翔, 吴盘龙, 陈尚敏
(南京理工大学自动化学院,南京 210094)
0 引言
近年来,随着航天科技的飞速发展和对月球认识的深入,月球已成为人类进行深空探测的重要基础,月球探测成为世界航天的热点[1]。当前月球卫星主要依靠地面站进行遥控遥测,月球卫星与地面站距离较远,信号延迟大,月球背面不可见弧段等,且月球卫星上必须装备复杂而昂贵的测控和通信设备。因此,对月球卫星进行自主导航具有重要意义,一方面可以大大降低探测任务和地面支持的成本,另一方面有助提高月球卫星的生存能力[2-4]。
X 射线脉冲星导航(XNAV)是一种适合于深空探测的新兴天文自主导航技术,能够为近地轨道、深空和星际空间飞行的航天器提供位置、速度、时间和姿态等高精度导航信息[5-6]。XNAV 不与外界进行信息传输和交换,具有抗干扰能力强、可靠性高、适用范围广和误差不随时间积累的优点,发展潜力很大,在航天领域具有巨大的应用前景[7]。
本文提出一种基于X 射线脉冲星导航的月球卫星自主导航方法。结合月球卫星轨道动力学方程和脉冲星的量测信息,利用分段式定常系统(PWCS)的可观测性分析方法对导航系统进行可观测性分析,并采用航天领域广泛使用的扩展卡尔曼滤波(EKF)算法进行数据处理。最后,通过数学仿真,验证了该系统能够实现月球卫星的自主导航。
1 导航系统数学模型
1.1 月球卫星轨道动力学方程
选取历元(J2000.0)月心赤道惯性坐标系,月球卫星轨道动力学方程可以表示为[8]
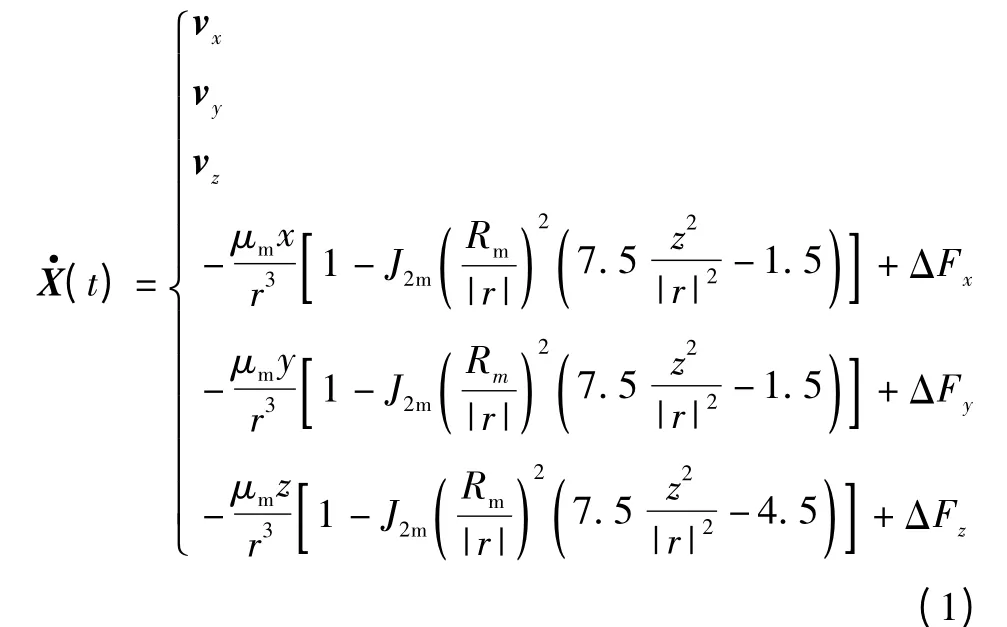
可简写为一般的状态方程

式中,X(t)=[x,y,z,vx,vy,vz]为状态变量,其中,x,y,z,vx,vy,vz分别表示3 个坐标轴所在方向航天器的位置与速度2 为航天器与月心的距离;μm=0.49028×1013m3/s2为月球引力常数;J2m=203.8×10-6为月球引力二阶带谐项系数;Rm为月球的平均半径;Fx,Fy,Fz表示航天器受到的摄动在x,y,z 3 个方向上的分量,包含月球的非球形因素;w(t)为等效的随机白噪声。
1.2 脉冲星导航量测方程
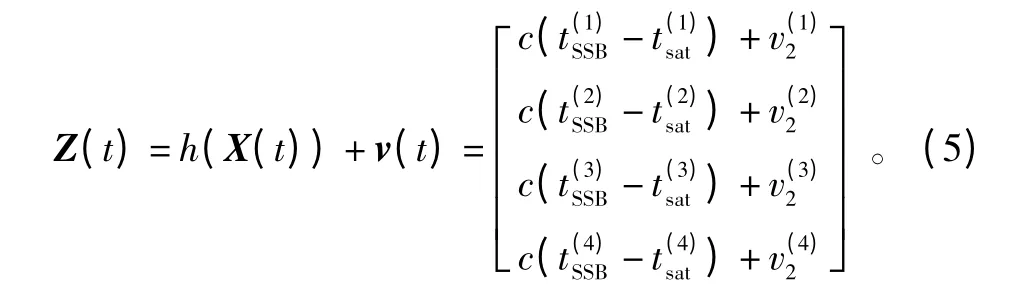
X 射线脉冲星导航系统的量测量是脉冲到达航天器与到达太阳系质心(SSB)的时间之差。脉冲到达航天器的时间通过航天器上的X 射线探测器观测得到,而到达SSB 时间是通过脉冲星钟模型预报得到的[9]。脉冲星导航基本原理如图1 所示。
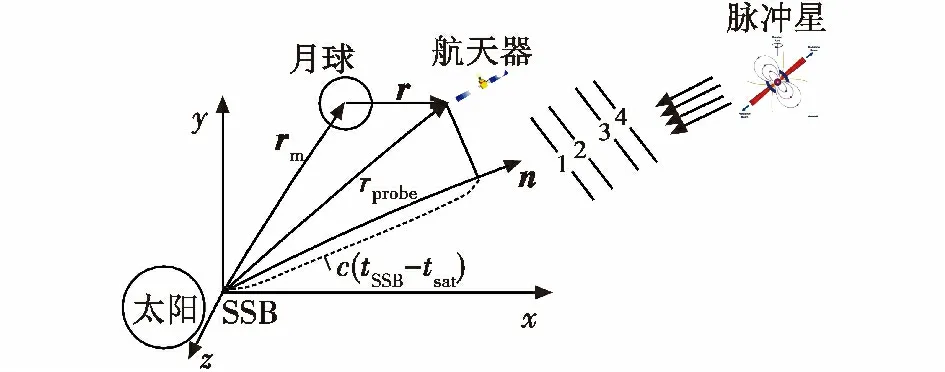
图1 脉冲星导航原理Fig.1 Geometric navigation principle based on X-ray pulsar
图中:tsat和tSSB分别为脉冲信号到达航天器和SSB的时间;r 为航天器相对月球的位置矢量;rm为月球相对SSB 的位置矢量;rsat=rm+r 为航天器相对太阳系质心的位置矢量;反映了rsat在脉冲星方向矢量n 上的投影。脉冲星的方向矢量为

式中,λ 和α 分别为SSB 坐标系下脉冲星的赤经和赤纬。
航天器测得的脉冲到达时间经过时间变换后,相对于太阳系质心的位置与时间差之间的关系可表示为
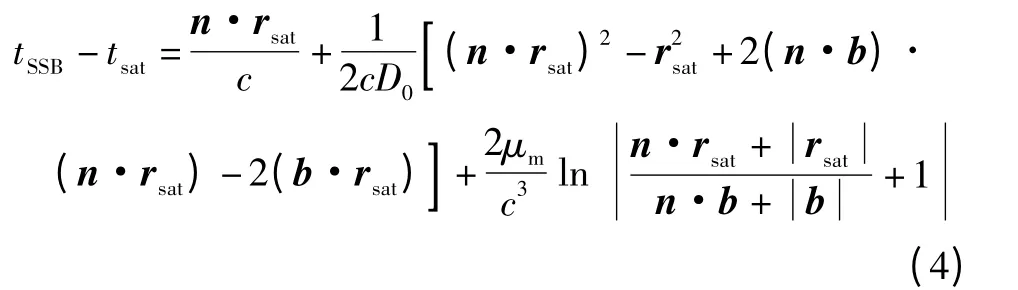
式中:c 为光速;b 为太阳系质心(SSB)相对太阳质心的位置矢量;D0为太阳质心与脉冲星之间的距离。式(4)右边开始第一项表示两个位置间简单的几何时间延迟,称之为Doppler 延迟;第二项是由时差效应引起的Roemer 延迟效应;最后一项是太阳引力场产生的光程弯曲所造成的太阳Shapiro 延迟效应。
X 射线脉冲星导航精度主要取决于脉冲到达时间(TOA)TTOA的测量精度σTOA。而TTOA的测量精度σTOA又是由脉冲轮廓的信噪比(SNR)RS,N决定的[10]。X 射线脉冲星辐射信号的信噪比为信号光子数Np和噪声σN的比值,所示[11]为

式中:BX为X 射线背景辐射流量,根据Naval 实验室的经验,一般取值为0.005 ph/(cm2·s-1);FX为X 射线辐射光子流量;pf为脉冲信号辐射相对脉冲星总辐射的比值;A 为探测器面积;T 为脉冲信号的观测时间;d 为脉冲宽度W 与脉冲周期P 的比值。
对于一个给定的观测,TTOA测量精度可通过脉冲宽度和脉冲信噪比确定,即

此精度表示基于单个观测的脉冲到达时间分辨率,一个TOA 量测可用于确定在视线方向上探测器到参考点之间的距离,距离测量精度为

设置探测器面积A=1 m2。表1 给出了X 射线脉冲星的参数,表2 给出了4 颗脉冲星的距离观测精度随观测时间变化的关系。
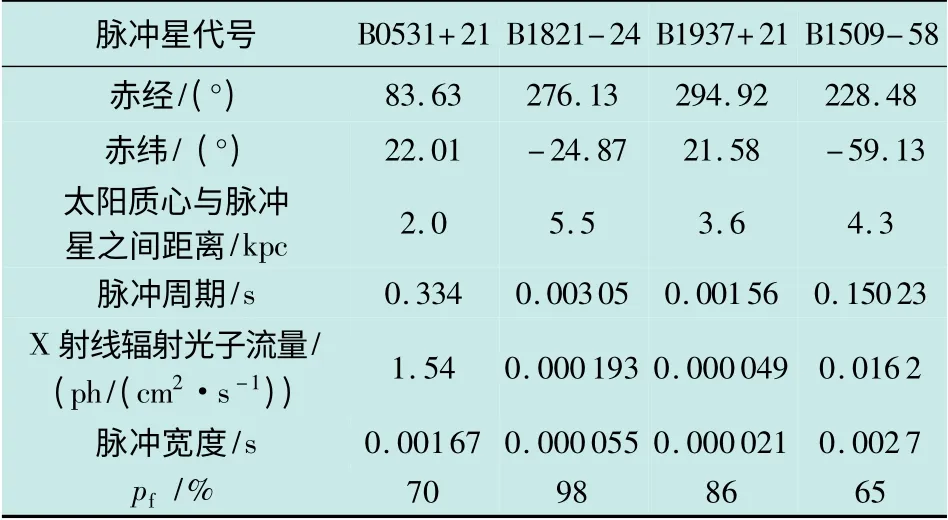
表1 X 射线脉冲星参数Table 1 Parameters of the X-ray pulsars
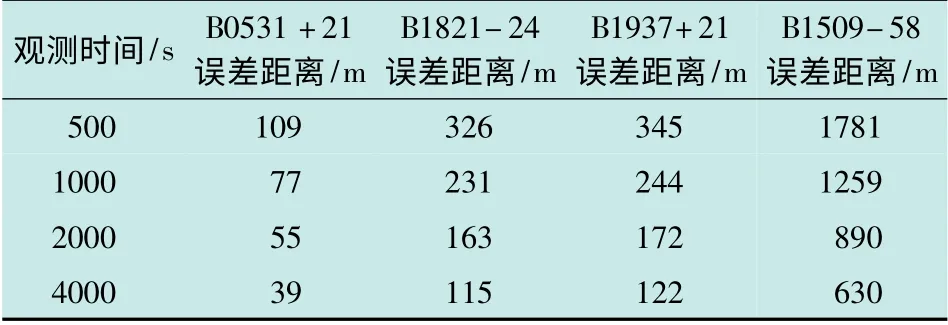
表2 距离观测精度随时间变化关系Table 2 Range measure accuracy with observation time
距离观测精度随时间变化情况如图2 所示。
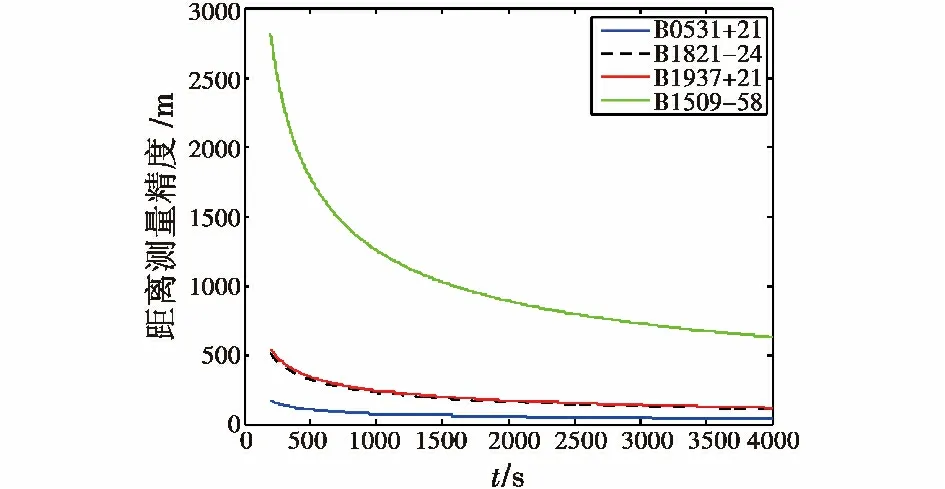
图2 距离观测精度随时间变化图Fig.2 The range measurement accuracy with the observation time
由图2 和表2 可知,观测时间越长,距离观测精度就越高。但是,累积时间越长会导致累积误差越大,那么导航系统误差就越大。
2 系统可观测性分析
在一个足够小的时间区间内,如果线性时变系统的系数矩阵变化量可以忽略不计,那么,在该时间区间内就可以把时变系统当作定常系统处理,则称这样的系统为PWCS,对其进行可观测分析的步骤和算法称为PWCS 可观测性分析方法[12-13]。
对于离散型系统

式中:

为系统状态转移矩阵,I 为6 ×6 阶单位矩阵;雅可比矩阵为

其中,03×3为3 ×3 阶零矩阵,I3×3为3 ×3 阶单位矩阵,
根据PWCS 可观测性分析方法,系统可观测性矩阵O 定义为
3 仿真结果与分析
月球卫星的标称轨迹由STK 生成,选取的4 颗脉冲星如表1 所示。仿真条件如下。
1)月球卫星轨道参数:半长轴为1938.2 km,偏心率为0°,倾角为0°,赤经为0°,近地点幅角为0°;
2)采样时间为500 s;
3)X 射线探测器面积为1 m2;
由于系统是非线性的,选择EKF 滤波算法来估计导航系统的状态。仿真结果如图3 ~图4 所示,状态估计误差均值如表3 所示。
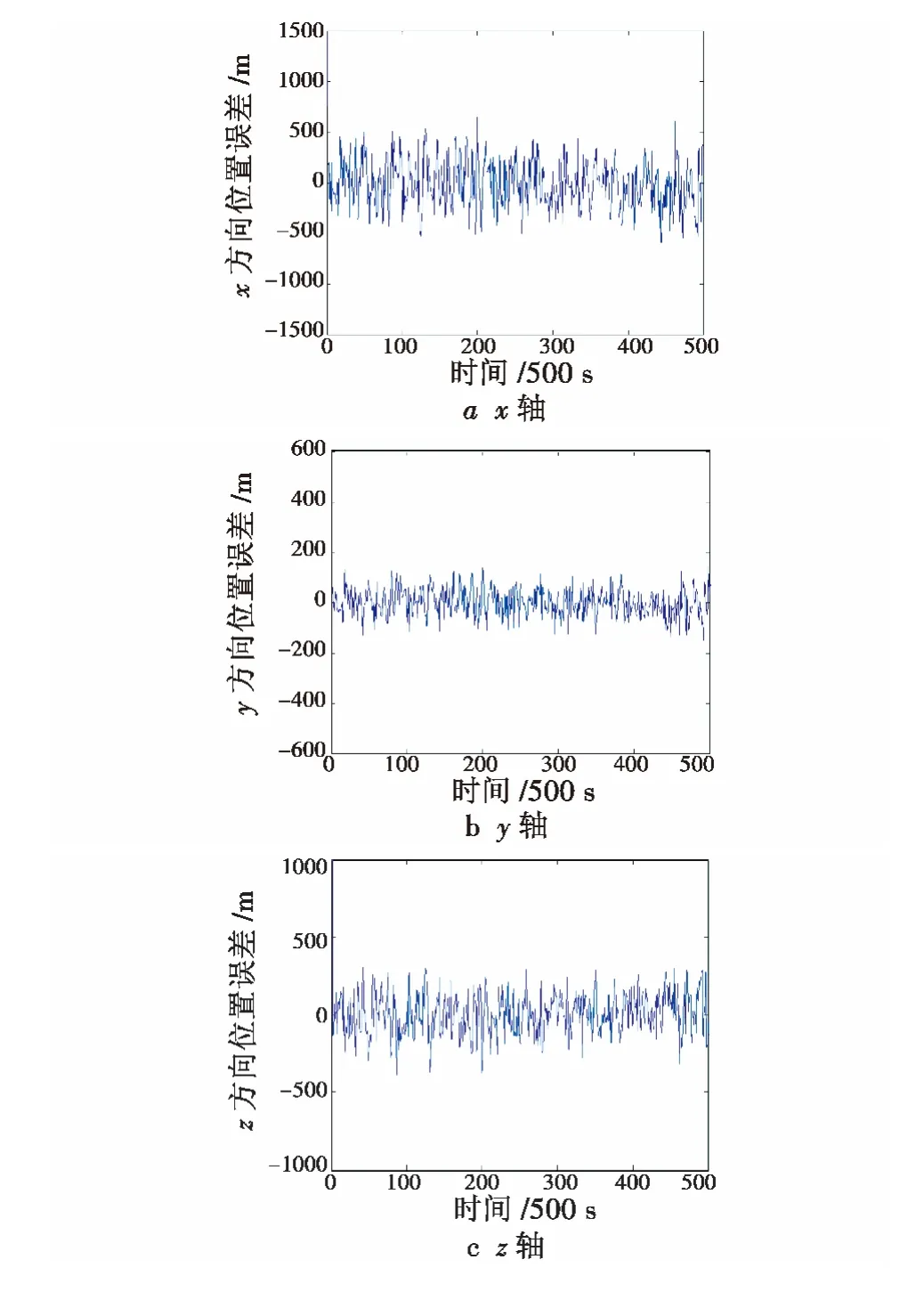
图3 各轴上的位置误差Fig.3 Position estimation error of each axis
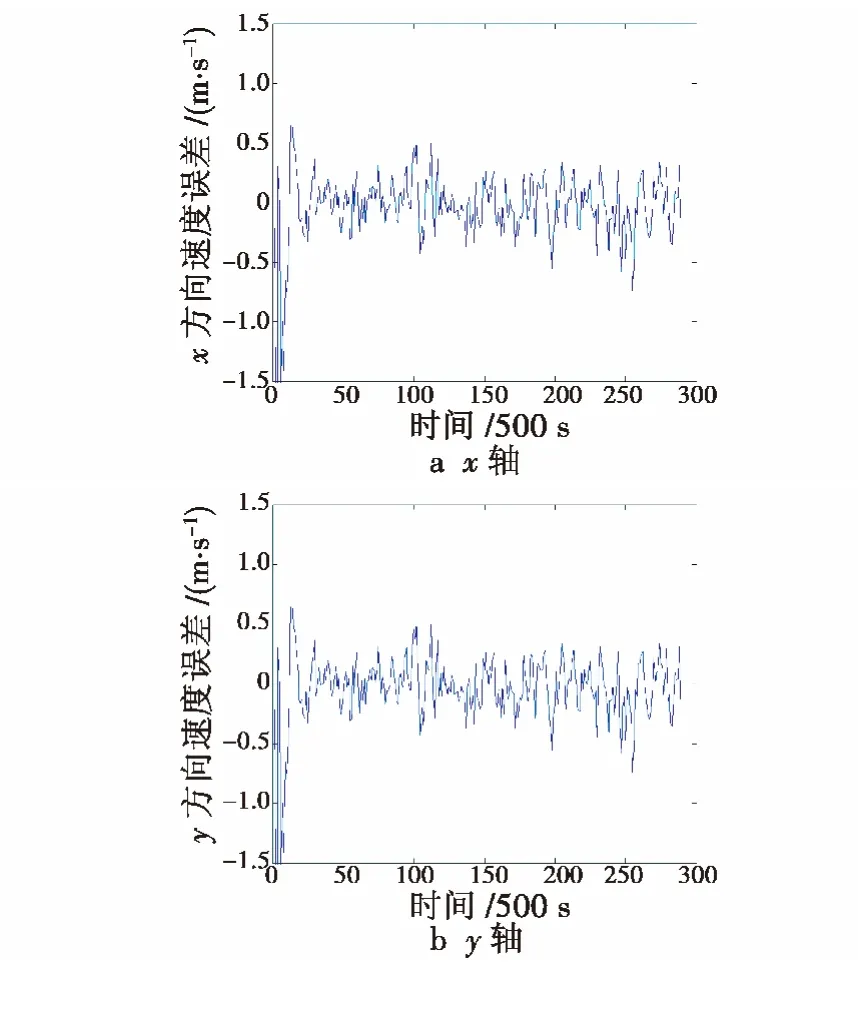

图4 各轴上的速度误差Fig.4 Velocity estimation error of each axis

表3 状态估计误差均值Table 3 The average values of estimation errors
图3 ~图4 和表3 分别给出了x,y 和z 轴上的位置和速度误差曲线及误差均值,该导航方法能够提供月球卫星位置和速度,并且达到较高的导航精度,是一种适于月球卫星自主导航的方法。
4 结束语
本文提出一种基于X 射线脉冲星的月球卫星自主导航方法,以月球卫星的位置和速度作为状态量,X射线探测器获得的脉冲到达时间作为观测量,分析了脉冲星的距离测量精度,并采用PWCS 可观测性分析方法对导航系统进行可观测性分析,结果表明系统是完全可观测的,最后采用卫星导航领域广泛使用的EKF 滤波算法进行状态估计,该导航系统能够提供较高精度的位置和速度信息。因此,该方法是一种可行的月球卫星自主导航方法。
[1] 宁晓琳,马辛.基于天文和陆标观测的月球卫星自主导航方法[J].宇航学报,2010,31(7):1737-1747.(NING X L,MA X. Autonomous navigation for lunar satellites using celestial objects and landmarks[J].Journal of Astronautics,2010,31(7):1737-1747.)
[2] 吴伟仁,王大轶,宁晓琳.深空探测器自主导航原理与技术[M]. 北京:中国宇航出版社,2011. (WU W R,WANG D Y,NING X L.Autonomous navigation principles and techniques for deep space probes[M].Beijing:China Astronautic Publishing House,2011.)
[3] NING X L,FANG J C. Spacecraft autonomous navigation using unscented particle filter-based celestial/Doppler information fusion[J].Measurement Science & Technology,2008,19(9).doi:10.108810957-0233/19/9/095203.
[4] 潘晓刚,矫媛媛,周海银.基于多传感器天文信息的自主主导航算法及可观测性分析[J].空间科学学报,2014,34(1):116-126.(PAN X G,JIAO Y Y,ZHOU H Y.Algorithm of astronomy autonomous navigation based on multisensor and the analysis of observability[J].Chinese Journal of Space Science,2014,34(1):116-126.)
[5] SHEIKH S I,PINES D J,RAY P S,et al.Spacecraft navigation using X-ray pulsars[J].Journal of Guidance Control and Dynamics,2006,29(1):49-63.
[6] 杨成伟,郑建华,李明涛,等.晕轨道X 射线脉冲星自主导航和轨道维持研究[J].武汉大学学报:信息科学版,2014,39(3):258-261.(YANG C W,ZHENG J H,LI M T,et al.Autonomous navigation and control in halo orbit based on XNAV[J].Geomatics and Information Science of Wuhan University,2014,39(3):258-261.)
[7] 费保俊,姚国政,杜健,等.X 射线脉冲星导航研究的若干问题[J]. 装甲兵工程学院学报,2013,27(3):1-8.(FEI B J,YAO G Z,DU J,et al.Some problems of research on X-ray pulsar-based navigation[J].Journal of Academy of Armored Force Engineering,2013,27(3):1-8.)
[8] 李茂登,荆武兴,黄翔宇.考虑月球扁率修正的月球卫星自主导航[J]. 宇航学报,2012,33(7):896-902. (LI M D,JING W X,HUANG X. Autonomous navigation for lunar satellite with lunar oblateness correction[J].Journal of Astronautics,2012,33(7):896-902.)
[9] LIU J,MA J,TIAN J W,et al.X-ray pulsar navigation method for spacecraft with pulsar direction error[J].Advances in Space Research,2010,46(11):1409-1417.
[10] WU J Y,YANG Z H,YANG N N.The accuracy analysis of the spacecraft autonomous navigation system based on X-ray pulsars[J]. Proceedings of the Institution of Mechanical Engineers,Part I:Journal of Systems and Control Engineering,2013,227(1):121-128.
[11] SHEIKH S I,PINES D J.Recursive estimation of spacecraft position and velocity using X-ray pulsars time of arrival measurements[J].Navigation,Journal of the Institute of Navigation,2006,53(3):149-166.
[12] 帅平,陈定昌,江涌.GPS/SINS 组合导航系统状态的可观测度分析方法[J].宇航学报,2004,25(2):219-224.(SHUAI P,CHEN D C,JIANG Y.Observable degree analysis method of integrated GPS/SINS navigation system[J].Journal of Astronautics,2004,25(2):219-224.)
[13] GOSHEN-MESKIN D,BAR-ITZHACK I Y.Observability analysis of piece-wise constant system-part I:theory[J]. IEEE Transactions on Aerospace and Electronics Systems,1992,28(4):1056-1067.
猜你喜欢
军事文摘(2023年12期)2023-06-12 07:51:00
科学(2022年4期)2022-10-25 02:43:42
国际太空(2022年7期)2022-08-16 09:52:50
中学生数理化·七年级数学人教版(2020年12期)2021-01-18 06:57:46
国际太空(2019年9期)2019-10-23 01:55:34
中学生数理化·七年级数学人教版(2019年12期)2019-05-21 02:53:50
国际太空(2018年12期)2019-01-28 12:53:20
国际太空(2018年9期)2018-10-18 08:51:32
中成药(2017年3期)2017-05-17 06:09:16
北京航空航天大学学报(2016年6期)2016-11-16 01:50:43