基于H2 预见控制的舰载机自动着舰控制方法
2015-04-11 10:12:34邵敏敏龚华军甄子洋
电光与控制 2015年9期
邵敏敏, 龚华军, 甄子洋, 江 驹
(南京航空航天大学自动化学院,南京 210016)
0 引言
舰载机着舰一般采用下滑道跟踪着舰。所谓下滑道跟踪着舰(舰载机等角下滑),是在进舰着舰的最后阶段,舰载机截获合适的下滑道后,一直保持相同的下滑轨迹角、俯仰角、速度和下沉率,直至舰载机与航母飞行甲板碰撞,实现撞击式着舰[1-2]。但由于舰尾流等气流扰动影响,实际下滑过程中传统的PID 控制器很难使舰载机完全跟踪下滑道轨迹。而舰载机在下滑过程中所保持的下滑轨迹角、俯仰角、速度和下沉率均可作为可预见信息,从而利用这些未来信息和过去、现在的信息对舰载机进行预见控制。
预见控制是利用已知的干扰或参考信息,来提高跟踪质量或干扰抑制效果。预见信息在控制系统中的作用,频域上是相位超前补偿,时域上是提前产生补偿作用。预见控制的一个主要应用领域是汽车驾驶模拟,即给无人驾驶车辆设计控制系统[3];另一个应用领域是主动悬挂系统的设计[4],已具有显著效益。除此之外,在信息融合方面,预见控制已有新发展,提出了信息融合最优预见控制[5-6]。而关于飞机方面的预见控制研究包括运用预见控制对无人机航迹进行控制[7-8]以及运用最优预见控制来减轻驾驶员的决策负担[9]。
本文主要研究基于H2全信息预见控制的舰载机自动着舰控制方法。首先将舰载机的非线性模型线性化,然后根据线性化模型设计H2全信息预见控制器,最后将控制器运用到非线性模型中并进行验证,通过与传统PID 控制比较发现,H2全信息预见控制跟踪效果更好。
1 舰载机H2 预见控制问题
舰载机通常采用将纵向通道和横侧向通道分开设计控制器的方法。其中:纵向通道主要是控制高度;横侧向通道主要是控制侧偏。舰载机下滑着舰的理想轨迹是事先确定的,其中的重要信息为期望高度,作为可预见的未来期望信息,因此,为了有效利用着舰下滑轨迹预见信息,自动着舰系统的纵向通道运用了H2全信息预见控制,而横侧向通道仍然采用传统的PID 控制,以消除舰尾流扰动引起的侧偏距并保持平衡姿态。最终将舰载机非线性模型的纵向通道、横侧向通道合并起来进行全量系统的控制。
根据H2全信息预见控制方法获得当前实际高度和当前以及未来预见期望高度之间的综合误差,这可以指导舰载机对未来自身状况做出提前操作以达到精确控制。
将一般描述舰载机非线性模型的微分代数方程统一为
式中:xa=(xb,xc),而xb= (h,V,α,q,θ)T,其中,h,V,α,q,θ 分别为飞机的高度、空速、迎角、俯仰角速度和俯仰角,xc= (β,p,r,φ,ψ,yc)T,其中,β,p,r,φ,ψ,yc分别为飞机的侧滑角、滚转角速度、偏航角速度、滚转角、偏航角和侧偏距;w 为舰尾流干扰;y 为输出信号;u =(ub,uc),其中,输入信号ub= (δe,δT)T,δe和δT分别为升降舵偏角和油门杆操纵量;uc=(δa,δr)T,δa和δr分别为副翼偏角和方向舵偏角。
图1 所示为含有预见控制的舰载机自动着舰引导系统。

图1 含有预见控制的舰载机自动着舰引导系统Fig.1 Automatic carrier landing system of the preview control
图中:下面部分是传统的PID 控制的横侧向通道,其中目标侧偏距为零;上面部分是采用H2全信息预见控制的纵向通道。其中:r'为参考信息(h,V,α,q,θ)T的未来值,纵向输出信号为p=xb。
如图1 所示,在纵向通道里,本文目标就是设计一个控制器K 使得p 尽可能地跟踪Φr'。

式中:Φ 代表一个类似移位寄存器的延时器;lr'为参考信息的维数;N 为预见步数;p(kTs)为系统的输出向量,其从当前kTs时刻到未来(k+N-1)Ts时刻的数据都存储在xp里,Ts为采样时间;yp(k)为延时器的输出信号;

跟踪误差e 定义为

2 H2 全信息预见控制算法
1)将非线性模型式(1)、式(2)在平衡点处线性化,然后按采样时间Ts进行离散化,得到如图2 所示的线性化后的纵向通道的预见控制结构。

图2 线性化后的纵向通道的预见控制结构Fig.2 The preview control structure of the linearized longitudinal channel
图中:Δr'为提前可预见信息的增量值;G 为被控对象的传递函数矩阵;W1为纵向预见控制律输出权重;W2为纵向预见控制律输入权重;z1为控制性能指标的输出部分;z2为控制性能指标的输入部分。
图2 中的状态空间模型为
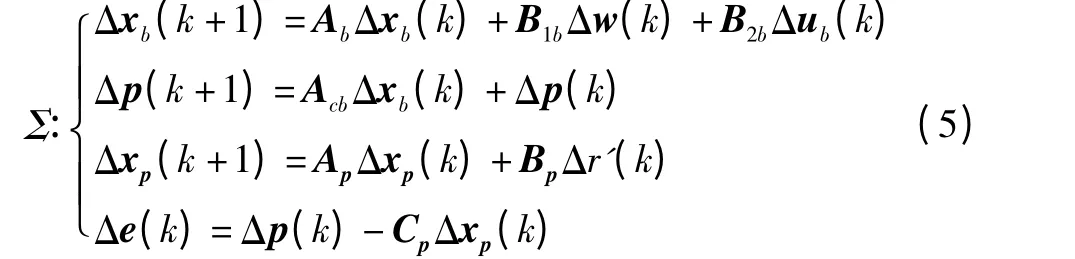
式中,Ab,B1b,B2b,Acb均为舰载机的纵向状态空间矩阵。
2)针对上述系统Σ,可推导得到

定义G(Z)的状态量为xg= (ΔxbΔp)T。目标要寻找控制信号Δu,使得控制性能指标J 最小化,即

要得到满足要求的H2全信息预见控制器,系统必须满足以下3 个条件[10]:
1) (AgB2)g 是稳定的;
2)W2'W2>0;
定义G 的状态量为xg,Φ 的状态量为Δxp,那么图2 中的输入信号Δu 为



当w 为可预见的干扰,u-b为输入信号的配平值,且干扰的可预见步数为M,则
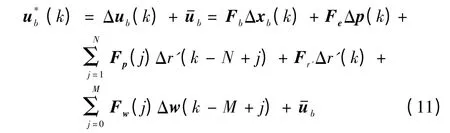
当w 为不可预见的干扰时,则令式(11)中的M=0。
式(11)表明H2全信息预见控制由6 项组成:第1、第2 项是反馈控制,主要作用是使系统的误差减小;第3 ~5 项都属于前馈控制,其主要作用是提高系统的响应速度,抑制干扰信号,以保证系统输出对目标信号的跟踪;第6 项为输入信号的配平值。
H2全信息预见控制是在状态反馈的基础上增加前馈控制实现的,因此其不仅具有一般状态反馈控制的特性,还具有前馈控制的特性。除此之外,利用已知的未来目标信号进行前馈补偿控制还具有以下两个性质。
性质1 根据式(5),对确定的状态反馈系数矩阵Fg,若使H2反馈控制系统

渐近稳定,则有

性质1 说明离当前时刻越远的已知未来信息对前馈补偿的作用越弱。
性质2 对于确定的控制对象式(1)、式(2)和已知的未来信息,存在一个最佳的用于前馈补偿控制的预见步数N 和M,使目标信号前馈控制效果最佳。
性质2 说明了已知未来信息的前馈补偿控制,索取的未来预见步数既不能太长,也不能太短。预见步数太长,将使前馈补偿控制作用过强;预见步数太短,其前馈补偿控制的作用将不足,它们都会使目标信号前馈控制的效果降低。因此,通过适当地设定预见步数N 和M,可达到改善系统对目标信号的跟踪性能和抑制已知干扰信号的影响。
3 仿真结果
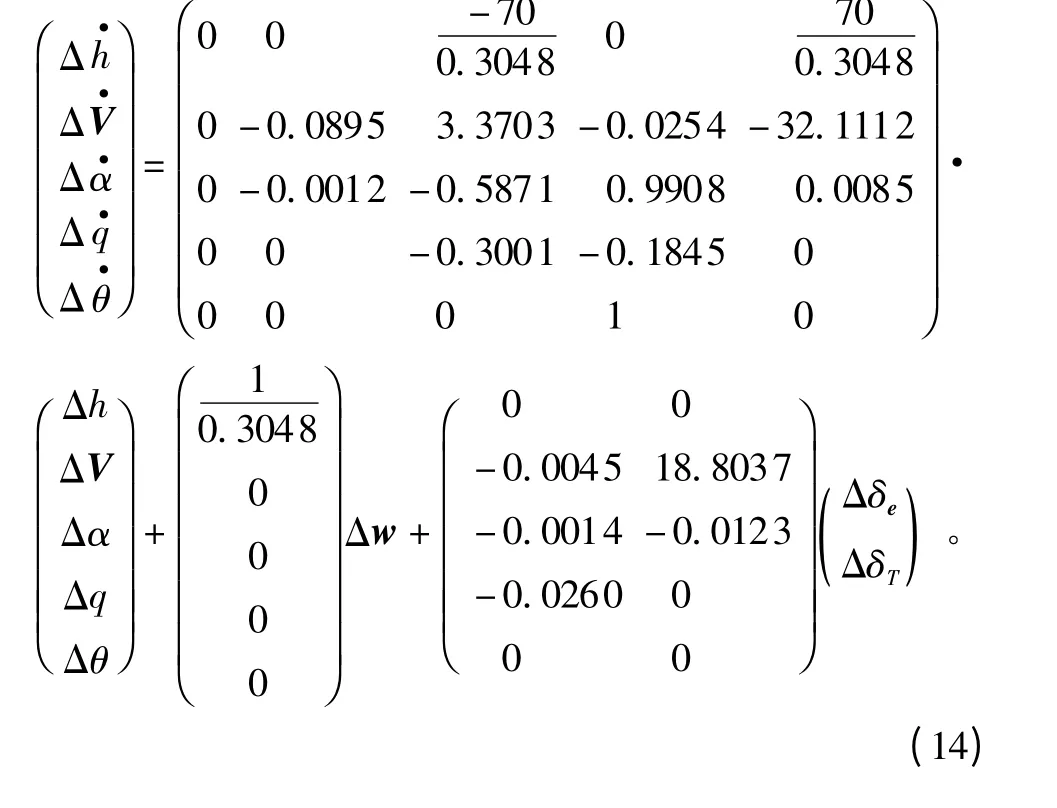
为考察H2全信息预见控制算法的有效性,考虑式(1)、式(2)所描述的某舰载机非线性模型,并使其在平衡点x-a处线性化,其中:
将干扰简化为舰尾流垂直风速,得到系统的纵向通道的状态方程
以采样时间Ts=1 ms 使其离散化,得到对应的离散系统状态方程,求出对应的传递函数矩阵G(Z)。根据上述H2全信息预见控制算法,取W1=diag(1 1031031 1);W2=diag(1031)。
求出对应的状态反馈系数Fg= ( FbFe),即

当舰载机非线性系统未受到舰尾流干扰时,H2全信息预见控制和PID 控制的效果如图3 所示。
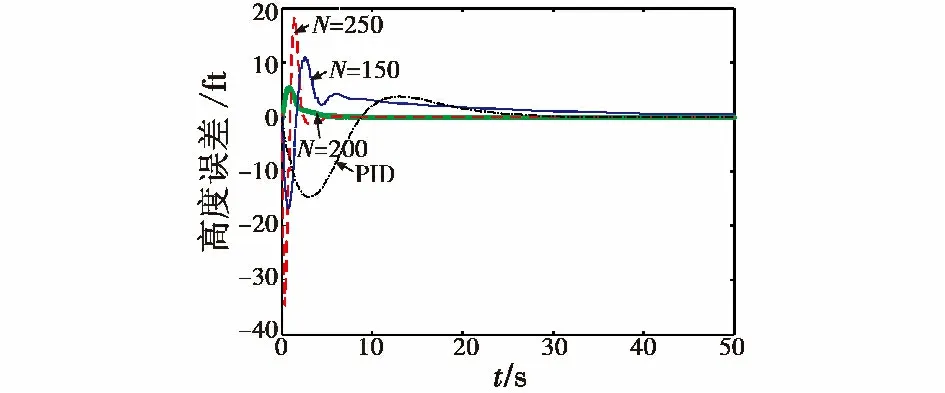
图3 无干扰时,H2 全信息预见控制和PID 控制的高度误差比较Fig.3 The height error of H2 full information control and PID control without disturbance
由实验可知,当N=200 时,跟踪效果最佳,且控制效果优于PID 控制。由图可知,H2全信息预见控制加快了系统响应速度,且当预见步数选取适当时,能很好地改善跟踪性能。
当系统受到不可预见的舰尾流干扰时,根据式(11),令M=0,经仿真验证得到H2全信息预见控制和PID 控制抑制干扰的效果比较,如图4 所示。当系统稳定后,PID 抑制不可预见的舰尾流干扰效果比预见控制的抑制效果好。
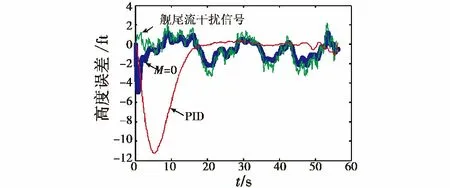
图4 M=0 时,H2 全信息预见控制和PID 对舰尾流干扰抑制对比Fig.4 The air wake disturbance suppression of H2 full information control and PID control when M=0
当系统受到可以预见的舰尾流干扰时,根据式(11),如图5 所示,令M=100,经仿真验证得到H2全信息预见控制抑制舰尾流干扰的效果比PID 控制更理想。
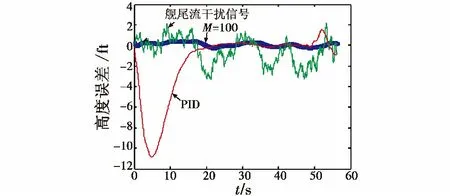
图5 M=100 时,H2 全信息预见控制和PID 对舰尾流干扰抑制对比Fig.5 The comparison of air wake disturbance suppression of H2 full information control and PID control when M=100
4 结论
H2全信息预见控制是一种最优控制方法。使用H2全信息预见控制对舰载机下滑道轨迹跟踪控制,不仅可以抑制舰尾流扰动,还能更好地跟踪着舰,优化控制过程。实验结果表明,H2全信息预见控制算法对于非线性系统的控制可行,预见步数选取适当,则控制效果优于传统的PID 控制,具有实用价值。
[1] 杨一栋.舰载飞机着舰引导与控制[M].北京:国防工业出版社,2007. (YANG Y D. Guidance and control of carrier aircraft landing[M].Beijing:National Defence Industry Press,2007.)
[2] 吴森堂,费玉华.飞行控制系统[M].北京:北京航空航天大学出版社,2010.(WU S T,FEI Y H. Flight control system[M].Beijing:Beihang University Press,2010.)
[3] FAROOQ A,LIMEBEER D J N.Path following of optimal trajectories using preview control[C]//European Control Conference CDC-ECC 44th IEEE Conference on Decision and Control,2005:2787-2792.
[4] 朱浩,刘少军. 列车车辆垂向主动悬挂的最优预见控制研究[J]. 机械科学与技术,2005,24(5):510-514.(ZHU H,LIU S J. Study on optimum-preview control of vertical active suspension of rail vehicle[J].Mechanical Science and Technology,2005,24(5):510-514.)
[5] 甄子洋,王志胜,王道波.基于误差系统的信息融合最优预见跟踪控制[J]. 控制理论与应用,2009,26(4):425-428.(ZHEN Z Y,WANG Z S,WANG D B.Optimal preview tracking control based on information fusion in error system[J].Control Theory and Application,2009,26(4):425-428.)
[6] 甄子洋,王志胜,王道波.基于信息融合估计的离散线性系统预见控制[J]. 自动化学报,2010,36(2):347-352. (ZHEN Z Y,WANG Z S,WANG D B. Information fusion estimation based preview control for discrete linear system[J]. Journal of Automation,2010,36(2):347-352.)
[7] 崔麦会,周建军,陈超.无人机航迹预见控制及其仿真研究[J]. 计算机测量与控制,2005,13(5):446-448.(CUI M H,ZHOU J J,CHEN C.Flight path preview control of UAV and simulation research[J].Computer Measurement and Control,2005,13(5):446-448.)
[8] ZHEN Z Y,JIANG J,WANG X H.Information fusion-based optimal attitude control for an alterable thrust direction unmanned aerial vehicle[J].International Journal of Advanced Robotic System,2013,43(10):1-9.
[9] 王亮,刘乐平,卢永锦.驾驶员最优预见跟踪仿真研究[J].系统仿真学报,2008,20(9):2441-2444. (WANG L,LIU L P,LU Y J. Simulation research of pilot optimal preview tracking control [J]. Journal of System Simulation,2008,20(9):2441-2444.)
[10] HAZELL A.Discrete-time optimal preview control[D].London:University of London,2008.
猜你喜欢
文萃报·周五版(2023年47期)2023-12-03 09:44:45
奇妙博物馆(2021年4期)2021-05-04 08:59:48
中等数学(2020年2期)2020-08-24 07:58:46
小演奏家(2018年9期)2018-12-06 08:42:02
测控技术(2018年9期)2018-11-25 07:44:24
雷达学报(2017年6期)2017-03-26 07:53:06
北京航空航天大学学报(2016年7期)2016-11-16 01:50:55
光学精密工程(2016年3期)2016-11-07 09:03:32
天津大学学报(自然科学与工程技术版)(2015年10期)2015-12-29 12:53:20
舰船科学技术(2015年8期)2015-02-27 15:38:42