
一种基于情景感知的Ad Hoc网络功率控制算法
2015-04-01 03:24:58闫力王海涛张焕青张学平王陈雨
桂林电子科技大学学报 2015年3期
闫力,王海涛,张焕青,张学平,王陈雨
(1.解放军理工大学 通信工程学院,南京210007;2.解放军理工大学 信息管理中心,南京210007)
Ad Hoc网络是一种特殊的通信网络,因其无中心、自组织和多跳路由等特点,具备良好的抗毁性和灵活性,在军事领域得到广泛应用。但是,战场环境复杂多变且较为恶劣,各种自然和人为因素都可能造成某些节点(特别是瓶颈节点)的异常或失效,导致网络分割,进而中断正常的通信活动。为了提高战场环境下Ad Hoc网络的可靠性和生存性,设计一种基于网络态势重构拓扑结构的方法很有必要,使网络在复杂环境下具备较强的自愈能力。
战场网络环境中,影响节点失效的因素很多,且随时间动态变化。在对节点状态进行判断时,若考虑的因素过少,会造成判断结果不准确;若考虑因素过多,又会增加计算量和复杂度。因此,应选取一些典型性的、相关性较强的影响因素作为判断依据。鉴于此,提出了一种基于情景感知的分布式功率控制算法(distributed power control algorithm based on contextawareness,简称DPCAC),可在由节点故障造成网络分割时通过自适应调节周围邻居节点的功率来快速恢复中断的通信,提高Ad Hoc网络的生存性和健壮性。
1 基本概念及相关定义
情景是可表征某一实体所处环境的信息,实体可以是人、地点或者任何与人和应用交互的相关对象,包括用户和应用本身[1]。情景可分为计算情景、用户情景、物理情景、时间情景和社会情景,各类情景又包含了若干子情景,从而形成一个情景谱[2]。情景感知一般包含3个过程:1)情景收集;2)情景建模和存储;3)情景推理和决策执行。情景收集的原始数据作为情景建模的输入,以一种机器可识别的形式储存,为情景推理和决策执行提供依据,而决策执行后又会改变对象所处情景,以达到自适应的目的。
可将战场环境下的情景按照图1分类。图1中的情景有些可利用传感器直接测量获得,如气温、风力等;有些则是用户的特定信息,如用户ID、身份等;还有些是节点通过软件代理实时测量的,如剩余电量、节点度和时间等。另外,一部分情景属于直接情景,可直接采集得到,如位置信息;另一部分属于间接情景,无法直接通过传感器或软件代理获得,需经过一定推理获得,如节点战斗状态就需根据节点移动性、武器使用情况、周边环境噪声等推理得到。应充分考虑影响节点生存状态的外在和内在因素,文献[3]在故障诊断时只考虑了一些与自身状况相关的因素,并未考虑外在环境因素。

图1 战场环境下的情景分类Fig.1 Context classification in battlefield environment
情景感知应用需要不断收集有关用户的信息,数量庞大,需要有效的情景信息建模方法,否则会使情景信息难以管理,并且查询感兴趣的信息也会变得困难。情景建模是指用一种机器能够识别和处理的方式定义和储存数据。目前,情景建模方法众多,如关键值模型、模式标记模型、图形模型[4]、面向对象的模型和本体模型[5-6]等。为降低建模难度,清晰表达情景和快速高效检索信息,可采用XML标记语言存储数量庞大的情景信息,并利用XPath实现对数据的高效检索。可扩展标记语言(XML)是一种结构化的数据描述方法,可根据用户需求自定义,并方便地进行数据的读写操作。XML的优良特性使其适合于描述情景信息[7]。
2 DPCAC
2.1 问题描述
考虑一个简单的战术Ad Hoc网络(图2),其中S和T分别代表一对正在通信中的源宿节点。假定某一时刻t通信中断,且网络层无法发现一条新的路由恢复被中断的通信,在源节点和宿节点本身未出现故障的情况下,可初步判断网络发生了分割。网络分割后进行修复,过程如图2所示。其中,分割S和T的节点集合有3组,即C1、C2和C3,C1为一个包含2个节点的最小点割集,而C2和C3均为割点。这3组节点集合中的一组或多组一旦发生故障会中断S与T之间的正常通信,称其为“疑似故障集”。为此,可通过分析3组节点所处环境的情景信息,根据这些信息对节点状态进行推断,确定出现故障的节点或节点集,然后将判断得到的故障集告知正常工作的节点。收到通告的正常节点可根据自己与故障集中节点的关系作出行动决策:若是邻居节点,则正常节点成为修复节点,可通过提升发射功率扩大覆盖范围,进而有可能桥接分割的网络。底层网络连通后,网络层可通过路由发现机制发现新的路由,进而恢复源宿节点的通信。若两者不是邻居节点,则正常节点不触发任何动作。图2(a)中S与T之间的初始路由为S-C1-C2-C3-T;图2(b)中某一时刻通信发生中断,通过对疑似故障集的3组节点进行分析,确定失效节点为C2,则其邻居节点C1(2个)、C3和N2均将发射功率提高,这样构成新的链路(C1,C3)和(N2,N3),网络分割被消除。图2(c)中S与T之间又产生了新的可用链路,通过路由协议产生新的路由S-C1-C3-T。
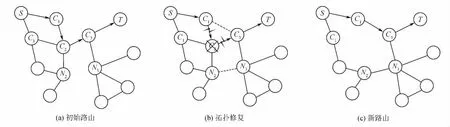
图2 拓扑修复过程Fig.2 Process of topology repair
2.2 算法流程
情景感知的一般过程为:情景收集、建模→情景推理→决策执行。基于此,DPCAC流程如图3所示,可以分为3个阶段。
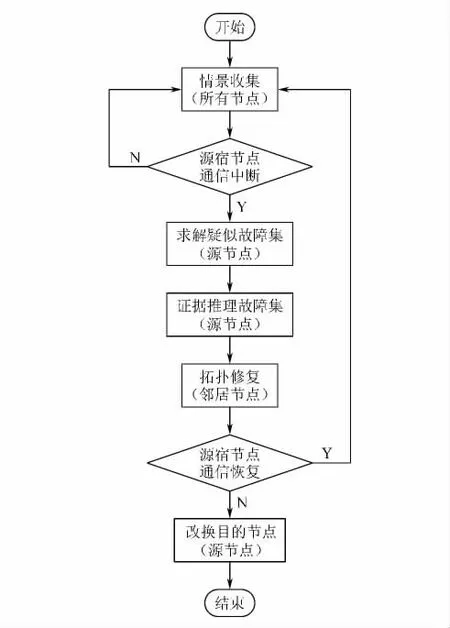
图3 DPCAC流程图Fig.3 The flow chart of DPCAC
1)情景收集存储阶段。该阶段周期性收集各个节点的情景,利用XML对情景进行建模,创建情景数据库。收集的情景主要包括用户情景、物理环境信息、通信参数和时间信息,每一时刻收集的情景作为一个信息单元保存在XML文件中。
2)故障定位阶段。该阶段在源宿节点通信发生中断后被触发。首先,利用前一阶段周期性收集的情景信息构造网络邻接矩阵,求解网络中分割源宿节点的所有最小点割集[8],构成疑似故障集。然后,基于DS(Dempster-Shafe)证据理论对每个点割集节点的生存状态进行情景推理,若该疑似故障集的所有节点均判定为失效,则作为一个故障集输出。推理过程中,不同类的情景信息被看作构成推理过程的“证据”,对证据进行组合,以得到最终结论。DPCAC选取5种证据构成情景空间[9],即当前环境下的天气状况、战斗情况、通信设备的磨损消耗、设备类型和电量剩余情况。各个取值空间的基本概率分配(BPA)可由专家经验给定,也可根据大量统计实验得出,有关证据理论的基本知识可参考文献[10]。式(1)为基本证据组合公式,
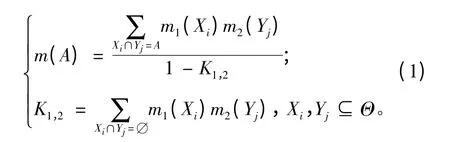
其中:K为冲突因子,表示被组合的2个证据之间的冲突程度;Θ为识别框架,是一个完备的、元素间互不相交的空间,此处为节点生存状态{normal,disabled}。由于经典DS证据理论进行证据融合时认为各证据的重要性相同,为反映实际中不同证据对于结论的影响不同,可根据情景空间中证据的重要性为其分配相应的权重。当证据合成时,若2个BPA之间的冲突因子超过某一阈值,依照式(2)根据权重分配值对BPA进行修正[10-11]:

其中:mi(A)为第i个BPA对命题A的信任程度;wi为第i个证据的权重;wmax为权重分配值中的最大值,在表1中即为剩余电量的权重值wer=0.25。进行组合时,先计算两者的冲突因子K,若大于指定阈值Kth,则修正BPA后进行组合,否则直接进行组合。这样,可通过修正BPA提高融合结果的准确性。最后合成BPA中支持度最高的结果即为推理结论。表1为情景空间的基本概率分配的一个示例。
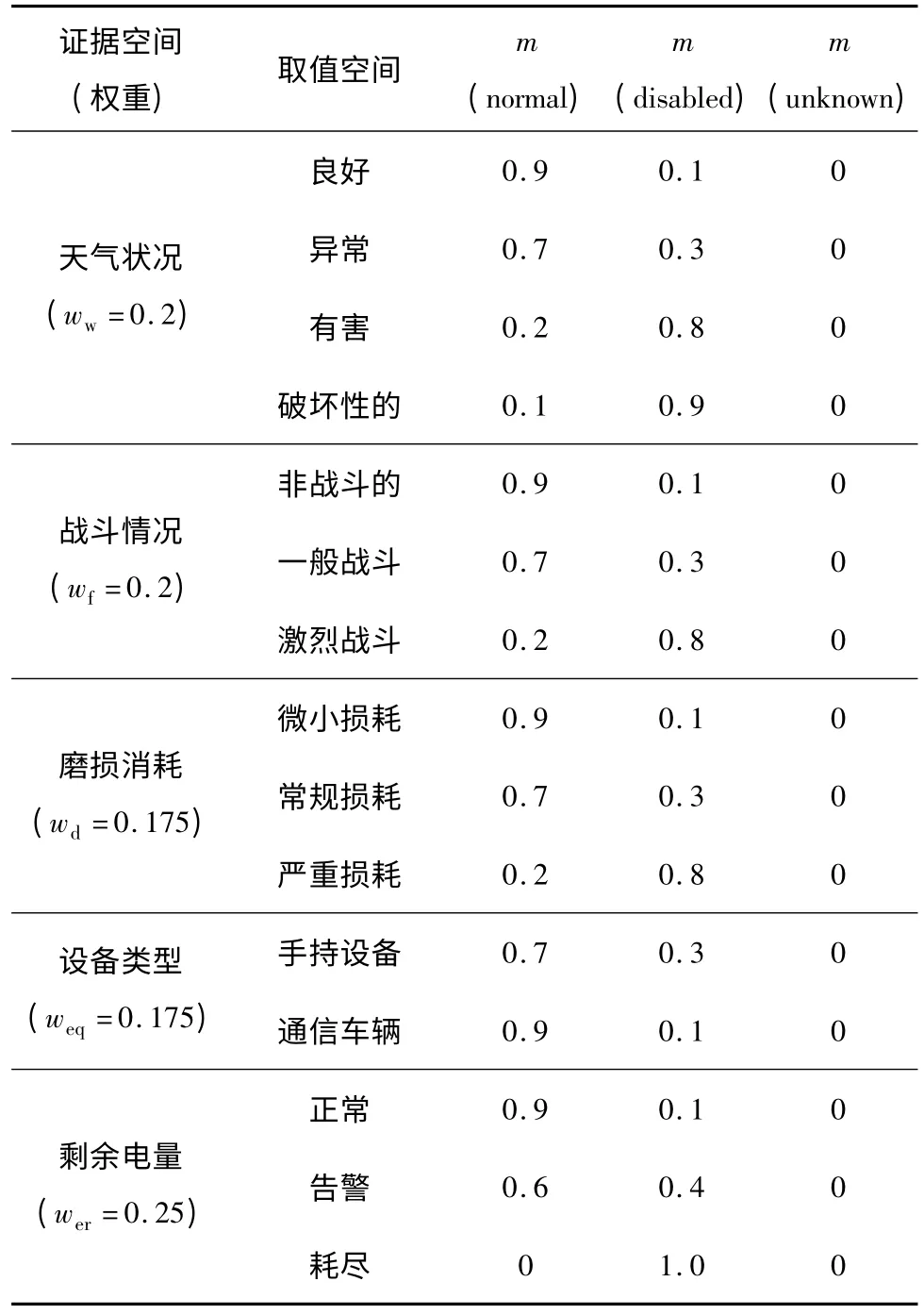
表1 情景空间中的基本概率分配Tab.1 The BPA in context space
3)拓扑修复阶段。根据前一阶段输出的故障集,由源节点在自己所在子网广播诊断消息,将求解的故障集信息通告每个节点,通告消息以源节点地址作为键值。收到诊断消息的节点判断自己是否是故障集节点的邻居,若是邻居节点,则将自己的功率调整至最大值,以迅速提升节点覆盖范围来桥接分割的网络,并记录已响应的源节点地址,同时也向该源节点以单播方式回复一条确认消息。经过指定时间(称为修复间隔)后,源节点测试到目的节点的链路是否修复成功,且不论结果如何,都将结果告知修复节点。在拓扑修复完成后,节点将在维持网络连通的条件下降低自身的发射功率,一方面节省有限的电量,另一方面减少由于提升功率带来的无线信道之间的干扰。若不是邻居节点,则不触发任何动作。整个策略执行过程如图4所示。

图4 策略执行过程Fig.4 The process of strategy execution
需要指出的是,DPCAC在以下几种情况不能有效恢复链路:1)宿节点本身发生失效;2)在邻居节点均将发射功率调整为最大值时,仍不能相互覆盖;3)推理结果与真实情况不符,无法确定故障节点。
3 仿真与分析
3.1 仿真环境和参数配置
以OPNET 14.5为仿真平台,建立网络模型。网络中的分组流由源节点产生,宿节点收到后进行回复,以模拟双向通信。网络协议采用AODV协议,MAC协议采用CSMA/CA。网络拓扑结构如图5所示。其中,源节点为soldier0,宿节点为soldier1。仿真参数配置如表2所示。
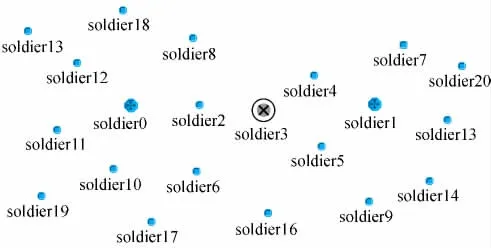
图5 网络拓扑结构Fig.5 The topology of network
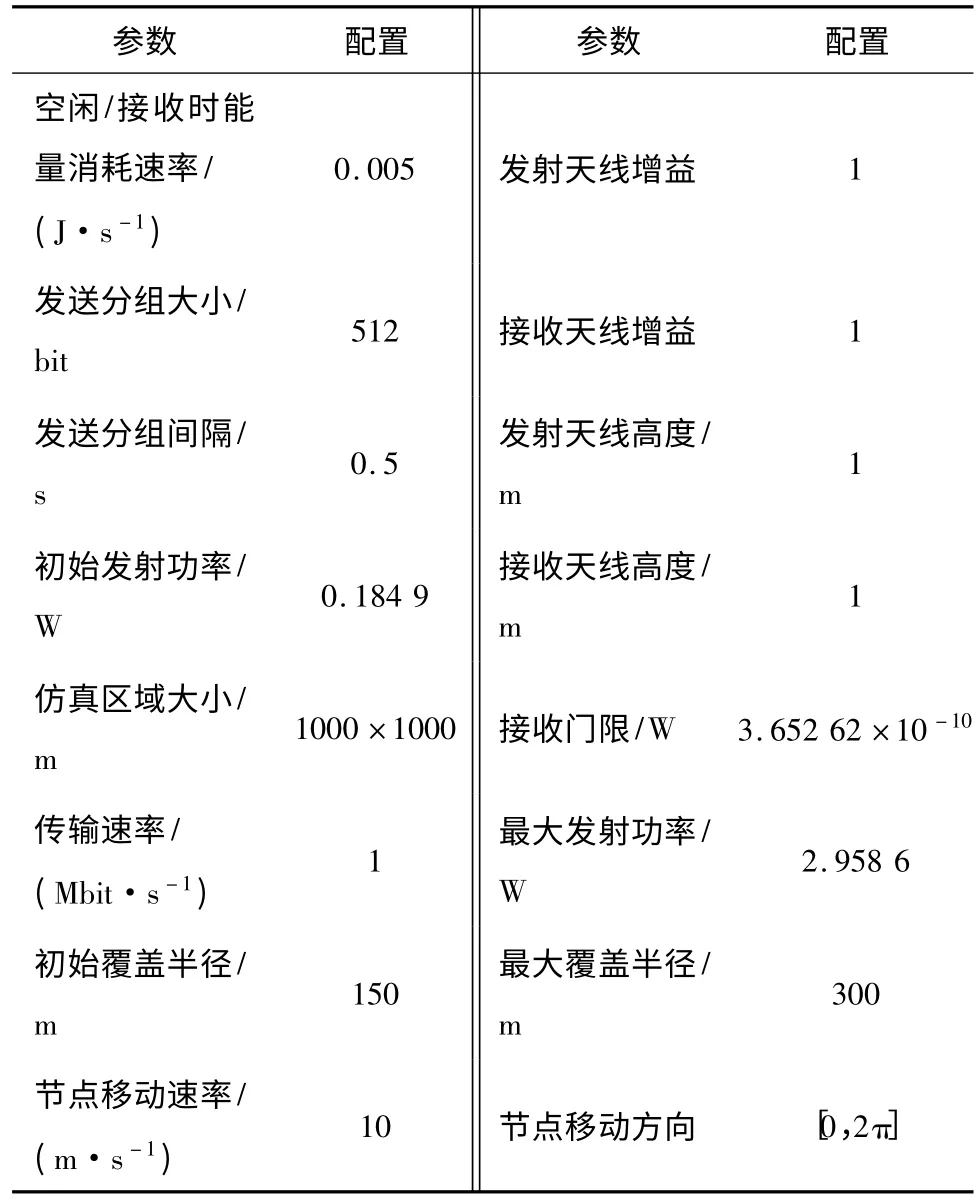
表2 仿真参数配置Tab.2 Parameters configuration in the simulation
某一时段只有soldier0和soldier1进行通信,发送一个分组所消耗的能量为

其中:P为节点的发射功率;B为所发送分组的大小;r为节点数据传输速率。假设soldier3节点位于拓扑割点位置,通信量较大,能量消耗过快,仿真初始能量为10 J,其他节点为150 J。
通过修改OPNET中的无线闭合管道阶段即可实现对信号覆盖范围的控制[12]。这里不考虑节点休眠状态,使用线性能耗模型。以x=500 m,y=500 m为轴将仿真区域划分为4个子区域,分别由随机函数产生该区域的天气状况、设备类型、设备磨损消耗和战斗状况作为属性在仿真初始设定,节点的故障函数服从指数分布。另外,仿真实验不考虑无线链路的不稳定性引起的丢包。
3.2 仿真结果及分析
仿真实验首先考虑节点采用DPCAC和未使用DPCAC的2种网络场景,对比2种场景下节点累计发送的数据量。图6为源节点soldier0在soldier3发生故障前后的输出数据量。从图6可看到,节点soldier3在约21 min时由于电量耗尽而失效,采用DPCAC的拓扑修复功能时,源节点soldier0的数据吞吐量几乎未受到影响,只在短暂的修复期(约6 s)数据吞吐量保持不变。未使用DPCAC时,由于节点soldier3的失效造成了网络分割为2部分,源宿节点失去可用链路,路由算法无法找到合适路由,导致在节点soldier3失效后一段时间内数据吞吐量不再增加。在1254~1260 s的修复期间,节点soldier0使用DPCAC相比于未使用时多出的一部分数据量是其发送的拓扑修复相关的控制分组所产生的。
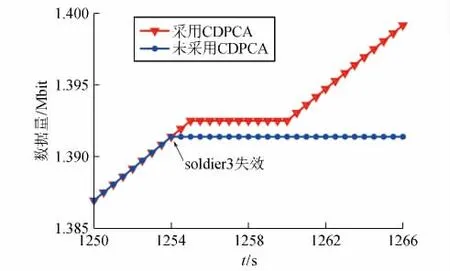
图6 soldier0在故障前后的输出Fig.6 The output of soldier0
图5 的网络源节点soldier0在通信中断后发起拓扑故障诊断,通过计算得到分割源宿节点的最小点割集有4个,即{[soldier1],[soldier2],[soldier3],[soldier4,soldier5]},这里将宿节点soldier1包括在疑似故障集中,然后通过分析收集的情景信息,得出故障集为{[soldier3]},将此结果广播后,所有故障节点的邻居均将发射功率提升至最大值,待通信恢复后,再调整发射功率,减少不必要的能量消耗,邻居节点soldier4的功率在调整后降为1.642 9 W。图7为采用DPCAC网络的输入和输出数据量对比。由于网络分割丢失了一部分分组,输出数据量略低于输入数据量。图8为soldier3的邻居节点soldier4在3种情况下的电量变化情况。从图8可看出,进行拓扑修复后电量消耗速率都变大,但功率调整后,电量消耗速率明显降低。未采用DPCAC的节点电量消耗率最小,这是因为节点soldier3失效后,不再有流量经过soldier4。
模拟实验结果表明,DPCAC能有效缓解由于网络节点意外失效造成的网络性能下降,且在恢复网络连通后,在保障链路畅通的条件下可通过调节节点功率降低节点能耗。
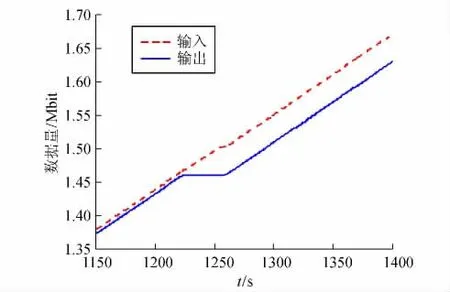
图7 网络输入输出数据量Fig.7 The input and output data of network
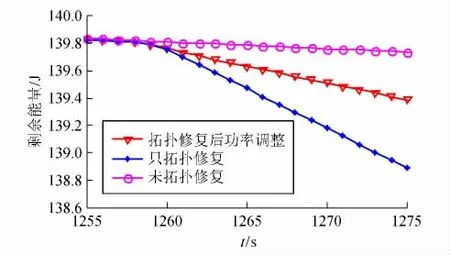
图8 soldier4在3种情况下的电量变化Fig.8 The energy change of soldier4 in different scenarios
4 结束语
针对战场环境下Ad Hoc网络中节点因各种内在和外在因素发生失效,进而造成网络分割的问题,提出了一种基于情景感知的分布式功率控制算法。该算法不需要中心控制节点,诊断过程由源节点发起,根据定期收集的节点情景,通过XML的XPath获知感兴趣的信息,推断疑似故障集节点的状态,从而得到故障结论,并启动相关节点功率调整机制,以达到恢复通信的目的。该算法适合于Ad Hoc网络的分布式特性,仿真实验表明,DPCAC可提高Ad Hoc网络在战场环境下的生存性和抗毁性。
今后的研究重点是:1)需进一步改进情景感知框架的推理方法,提高推理准确性;2)DPCAC只考虑了5种情景作为推理依据,实际情况中可能会有更多的影响因素,应进一步丰富情景种类;3)DPCAC除了调整相关节点功率外,也可结合控制节点移动的方法,解决最大功率下仍无法覆盖的问题,这也符合战场Ad Hoc网络的特点,即行为可控性。
[1]Dey A K.Understanding and using context[J].Personal and Ubiquitous Computing,2001,5(1):4-7.
[2]顾君忠.情景感知计算[J].华东师范大学学报:自然科学版,2009(5):3-4.
[3]董妍.Ad Hoc网络拓扑重构方案的设计与仿真[D].沈阳:东北大学,2009:21-37.
[4]Almutairi S,Bella G,Abu-Samaha A.Specifying security requirements of context aware system using UML[C]//IEEE 2012 Seventh International Conference on Digital Information Management,2012:259-265.
[5]Lee K W,Cha S H.Ontology-based context-aware management for wireless sensor networks[M]//Advances in Computer Science,Environment,Ecoinformatics,and Education.Berlin:Springer Berlin Heidelberg,2011:353-358.
[6]Li Wenjia,Joshi A,Finin T.CAST:context-aware security and trust framework for mobile Ad-Hoc networks using policies[J].Distributed and Parallel Databases,2013,31(2):353-376.
[7]Xu Jianfeng,Wang Dong.Object-oriented and ontology context-aware modeling based on XML[C]//IEEE 2012 2nd International Conference on Computer Science and Network Technology,2012:1795-1800.
[8]Patvardhan C,Prasad V C,Pyara V P.Vertex cutsets of undirected graphs[J].IEEE Transactions on Reliability,1995,44(2):347-353.
[9]Wibisono W,Zaslavsky A,Ling S.CoMiHoC:a middleware framework for context management in MANET environment[C]//2010 24th IEEE International Conference on Advanced Information Networking and Applications,2010:620-627.
[10]Sun Rui,Huang Hongzhong,Miao Qiang.Improved information fusion approach based on DS evidence theory[J].Journal of Mechanical Science and Technology,2008,22(12):2417-2425.
[11]李艳娜,乔秀全,李晓峰.基于证据理论的上下文本体建模以及不确定性推理方法[J].电子与信息学报,2010,32(8):1806-1811.
[12]Krishnamurthi N,Yang S J,Seidman M.Modular topology control and energy model for wireless ad hoc sensor networks[C]//Proceedings of OPNETWORK’04,2004:11-14.
猜你喜欢
疯狂英语·初中天地(2022年2期)2022-07-07 08:50:30
学苑创造·B版(2022年9期)2022-05-30 18:16:10
劳动保护(2019年3期)2019-05-16 02:37:38
网络安全和信息化(2018年3期)2018-11-07 03:02:44
四川水力发电(2018年4期)2018-03-25 14:04:35
小天使·一年级语数英综合(2017年3期)2017-04-25 03:30:15
铁道通信信号(2016年8期)2016-06-01 12:10:21
小天使·一年级语数英综合(2015年8期)2015-07-06 06:14:25
电测与仪表(2014年16期)2014-04-22 05:20:30
电测与仪表(2014年16期)2014-04-22 05:20:26
