
基于循环队列的磁梯度张量测量数据同步技术设计*
2015-03-30 05:53万家佐凌振宝李文可
传感器与微系统 2015年7期
万家佐,凌振宝,王 君,马 超,李文可
(吉林大学 仪器科学与电气工程学院,吉林 长春130061)
0 引 言
磁法勘探中的测量对象分为地磁场和磁异常场,磁法勘探的原理就是提取磁异常场进行研究分析来实现矿体定位和分析地质构造等目的,按探测对象的不同分为磁场模量测量、磁场矢量测量和磁梯度张量测量[1]。
磁梯度张量测量就是测量地磁场矢量三个分量在相互正交的三个方向上的空间变化率,是一种重要的磁场特性分析方法,它几乎不受地磁场的干扰,能够弱化背景磁场,突出局部异常磁场,没有对地磁场方向极度敏感的缺点,是目前磁测研究的热门方向[2~4]。
磁梯度张量测量中使用的传感器是矢量传感器,在实际探测中其探头姿态的变化会导致磁梯度张量分量发生波动,从而出现假的磁异常,影响探测的分析结果,因此,在探头中安装惯导系统并通过惯导数据对该部分数据进行补偿实现姿态校正是非常必要的[5]。
实际设计中的惯导系统和张量数据探测与采集系统一方面使用不同的时钟系统;另一方面具有不同的数据更新率,在进行惯导数据和张量数据融合设计时,必须保证用于融合的两种数据在采集时间点上严格一致,所以,在具体系统的设计中,研究有效的数据同步技术具有非常重要的意义[6~8]。
1 磁场张量梯度测量系统数据同步采集技术
惯导系统和张量采集系统是互相独立的,它们分别使用不同的时钟系统,另一方面,二者的采样率或者说数据更新率是不同的,惯导系统的采样率通常在几百赫兹,张量传感器的数据更新率能够达到1kHz 以上,因此,研究有效的数据同步采集技术是非常关键的。
GPS 接收机会输出一种间隔为1s 的秒脉冲(pulse per second,PPS)信号,它与协调世界时(UTC)的时间同步误差不超过1 μs,可以将数据打上时间标记从而为全世界的用户提供时间同步能力[9~11]。因此,可以利用惯导系统中GNSS 接收机输出的PPS 触发梯度传感器的数据采集装置进行数据采集,具体硬件实现方式如图1 所示。以GPS 接收机输出的1 PPS 为参考基准,控制IMU 采集装置和张量数据采集装置严格在1 PPS 的上升沿分别进行一次姿态数据和张量数据采集,并送至上位机处理。由PPS 触发采集装置的采集保证了梯度传感器数据采集装置的采样和惯导系统IMU 采集装置的采样与UTC 时间严格对齐。
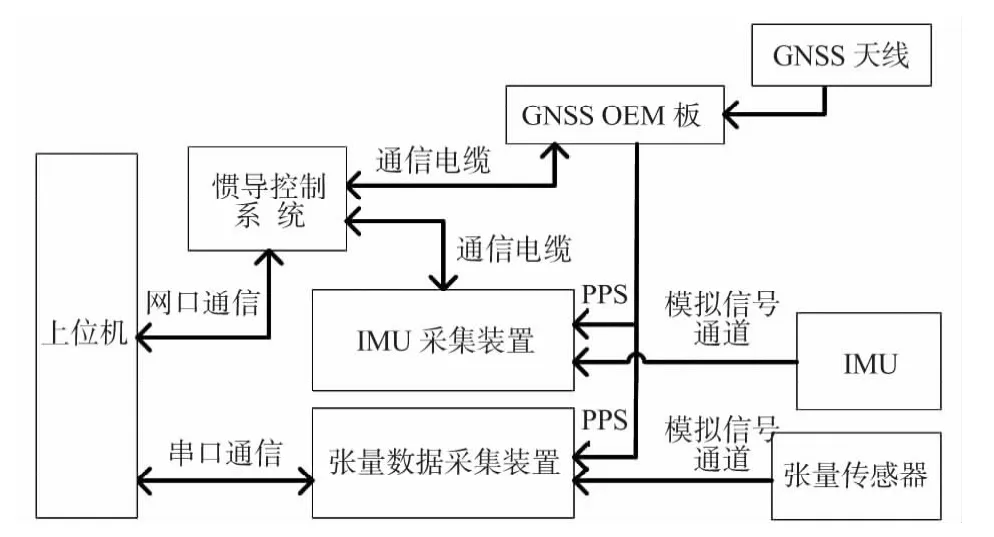
图1 磁梯度张量测量系统数据同步采集连接方式Fig 1 Magnetic gradient tensor measurement system data synchronization acquisition mode of connection
2 磁场张量梯度测量系统数据同步保存技术
软件设计中数据同步的实现,是将接收的张量数据与惯导数据以一定的格式打包在一起,存储到文件中,在数据打包的过程中,通过提取张量数据的时间信息和惯导数据的时间信息,二者对比处理,确保二者的数据信息同步。
为此,设计了基于循环缓冲队列的数据同步采集技术,使用循环队列的好处是平衡读取数据和写入数据的速度差异,进而提高运行效率,节省内存空间增强资源利用率,非常方便提取与拼接数据包,此外,很容易通过设置循环队列的容量大小从而避免数据在接收过程中由于缓冲区阻塞而丢失的情况。
队列是一个先进先出的线性表,其插入元素和删除元素操作在表的不同端进行。添加元素的一端叫做队尾,删除元素的一端叫做队首。而循环队列可用式(1)来描述

把数据queue[MaxSize]描述成一个循环队列,则第一个元素为queue[0],第二个元素为queue[1],其他元素依次类推,直到第MaxSize 个元素queue[MaxSize]时,下一个元素则重新指向数组queue[0]。
基于上面的思路引入循环队列缓冲机制,通过循环队列缓冲区可以按不同的需要保存一定时间的数据量,系统中梯度传感器采集的数据与惯导系统的数据是异步的,数据开始采集时分别将张量数据和惯导数据存放在两个循环缓冲区内,并定义为FIFO1 和FIFO2,并以GPS 测量的时间为标准,在两个循环缓冲区内提取数据并进行数据融合。软件运行后从存放张量数据的循环队列缓冲区FIFO1 提取标记GPS 时间T1的数据,从存放惯导系统数据的循环队列缓冲区FIFO2 提取标记GPS 时间T2的数据,如果T1>T2,则等待惯导系统继续向循环队列缓冲区FIFO2 添加数据;如果T1<T2,则等待张量数据采集模块继续向循环队列缓冲区FIFO1 添加数据;如果T1=T2,则将张量数据和惯导系统数据标记同样的GPS 时间标签后进行数据融合处理和进一步处理工作。具体工作流程如图2 所示。

图2 数据同步融合处理流程图Fig 2 Flow chart of data synchronous fusion processing
3 实验与结果分析
在磁梯度恒定的环境中,将载有惯导系统和梯度传感器的小车置于地面进行往复运动,记录整个运动过程的磁场梯度张量分量数据,将保存的数据经过Matlab 软件进行仿真处理并对结果进行分析和比较。
从磁梯度张量的几个分量中选取Gzz分量进行分析,经过惯导系统测量的姿态信息对梯度传感器测量的Gzz分量进行姿态校正处理后得到图3所示的结果,由图中曲线可以明显地看出:因为在载体运动时梯度传感器的姿态发生变化,导致所测得的磁场张量有较大的波动,经过姿态校正后的磁场梯度数据相比校正前的磁场张量波动明显较小,曲线相对变平稳了,符合所测环境中磁梯度的的特征。该结果表明:惯导系统对张量数据的姿态变换校正效果良好,校正程度较高。

图3 校正前后磁场梯度分量Gzz的变化Fig 3 Change of magnetic field gradient component Gzz before and after correction
4 结 论
本文提出了一种磁场张量梯度数据同步采集与保存技术,将上位机接收梯度传感器和惯导系统同一时刻采集的数据同步保存和处理,对于解决在航空张量测量中通过惯导系统对梯度传感器进行姿态校正的问题提供了基础和保证。
[1] 张昌达.航空磁力梯度张量测量—航空磁测技术的最新进展[J].工程地球物理学报,2006,3(5):354-361.
[2] Sui Yangyi,Li Guang,Wang Shilong,et al.Compact fluxgate magnetic full-tensor gradiometer with spherical feedback coil[J].Review of Scientific Instruments,2014,85(1):014701-014707.
[3] Sui Yangyi,Li Guang,Wang Shilong,et al.Asphericity errors correction of magnetic gradient tensor invariants method for magnetic dipole localization[J].IEEE Transactions on Magnetics,2012,48(12),4701-4706.
[4] 李 光,随阳轶,刘丽敏,等.基于差分的磁偶极子单点张量定位方法[J].探测与控制学报,2012,34(5):50-54.
[5] 刘晓杰.航磁补偿技术研究[D].长春:吉林大学,2009.
[6] Killeen P G.Mineral exploration trends and developments in 1998[J].Canadian Mining Journal,1999,120( 1):10-18.
[7] 吴招才,刘天佑.磁力梯度张量测量及应用[J].地质科技情报,2008,27(3):108-110.
[8] 骆 遥,段树岭,王金龙,等.AGS—863 航磁全轴梯度勘查系统关键性指标测试[J].物探与化探,2011,35(5):620-625.
[9] 晏登洋,任建新,宋永军.惯性/地磁组合导航技术研究[J].机械与电子,2007,25(1):19-22.
[10]梁才剑,魏 武.GPS/SINS 组合导航及其数据同步的研究[J].微计算机信息,2009(4):177-178.
[11]杨功流,李士心,姜朝宇.地磁辅助惯性导航系统的数据融合算法[J].中国惯性技术学报,2007,5(1):46-49.
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
数学物理学报(2021年1期)2021-03-29
五邑大学学报(自然科学版)(2020年4期)2020-12-09
小学生学习指导(低年级)(2020年4期)2020-06-02
软件(2020年3期)2020-04-20
杭州电子科技大学学报(自然科学版)(2020年1期)2020-04-09
军营文化天地(2018年2期)2018-12-15
北京航空航天大学学报(2018年1期)2018-04-20
产品可靠性报告(2017年7期)2017-09-05
中国惯性技术学报(2017年1期)2017-06-09
