红外场景仿真技术发展综述
2015-03-29 05:59白廷柱金伟其
红外技术 2015年7期
王 霞,汪 昊,徐 超,白廷柱,金伟其
红外场景仿真技术发展综述
王 霞,汪 昊,徐 超,白廷柱,金伟其
(北京理工大学光电成像技术与系统教育部重点实验室,北京 100081)
红外场景仿真技术在军事领域具有广泛的应用前景。介绍了红外场景仿真的3个阶段:数据准备、辐射计算和后处理;对各阶段的工作内容和实现途径做了简单说明。按照红外场景仿真技术的发展趋势,分析了国外在各发展阶段的主要工作,介绍了国内红外场景仿真概况及笔者目前的工作。最后指出了国内在红外场景仿真方面存在的几个问题。
红外场景仿真;辐射计算;渲染引擎
0 引言
红外成像相对于可见光成像具有较大的优势,由此推动了其在军事领域的应用。为了评估红外武器的作战效能,必须研究场景的红外辐射特性和成像系统性能。常规的评价方法为试验法,它能够较为准确的评价红外成像系统对特定环境的适用性,但存在一定的局限性。
红外成像质量受场景辐射、气象环境和成像系统性能3方面因素的影响,因此完善的试验测试应该同时考虑这3个因素。这就需要采用不同型号的成像系统,在不同的气象环境下,对不同场景进行实际成像测试。但是受经费、人力和时间以及不可控因素的影响,如此多样化的测试要求通常无法满足。所以试验测试法无法满足多样化的测试需求。
因此采用仿真计算和试验相结合的测试方法便显得尤为重要。红外场景仿真是指从理论计算的角度,通过场景构建、温度场分布计算、辐射计算、大气传输计算以及成像过程模拟来生成符合物理规律的红外图像。它除了用于成像系统性能评价之外,还可用于闭环自寻的红外制导仿真研究[1]、目标红外伪装研究[2]、红外目标识别跟踪算法测试[3]、红外目标搜索时间和发现概率研究以及作战人员训练等。总的来说,红外场景仿真技术在军事领域具有极大的应用价值和应用前景。
1 红外场景仿真技术
红外场景仿真是对红外成像过程的模型化描述,即目标辐射经大气传输到达成像系统,通过光电转换和信号处理生成数字图像。相应的红外场景仿真主要包含3个方面的内容,即虚拟场景构建、辐射计算和成像系统效果仿真。由此可以把红外场景仿真过程归纳为如图1的3个阶段。
1.1 数据准备
数据准备是红外场景仿真的前提,它包括4个方面的工作:场景几何模型构建、温度数据获取、光学材质获取以及数据与几何模型的关联。
虚拟场景由几何模型构成,它包括坐标数据,用来表示物体的外观形状;法线数据,作为参考方向,用来确定入射角和反射角;纹理坐标,用来确定一幅图像与几何模型关联方式,即纹理映射方式。目前有多种建模工具可以实现几何模型制作,如Multigen Creator,3D Max,Rhino等,地形制作可以采用Terra Vista。通常顶点坐标和法线方向在建模过程中自动生成,而纹理坐标需要进行调整。
温度数据是计算自发辐射的前提,温度数据可以通过试验测量和仿真计算获得。试验测量数据较为准确,但是其局限性较大。一方面温度是随时间变化的,测量数据只适用于特定时间点,另外目标不同部位温度差异较大,这就需要大量的温度测试点。仿真计算法是根据目标材质类型、气象条件和对流状况等建立热平衡方程来求解温度值。该方法计算过程复杂,模型的准确性需要加以验证。
红外辐射计算过程中需要用到光学材质数据,主要有发射率和反射数据。根据应用需求不同所需要的数据也会不同,如波段仿真只需要提供波段平均值,而光谱仿真则需要提供光谱值。另外反射模型不同,要求的反射数据也不同,例如粗略仿真采用反射率,而精确仿真采用双向反射分布函数(BRDF)[4]。
几何模型不同部位的温度和光学材质是不同的,因此必须实现数据与几何模型的准确关联。温度关联有3种方法,一是为每个几何面元指定一个温度值,二是为几何模型每个顶点指定一个温度值,三是通过纹理映射实现温度纹理与几何模型的关联。材质数据的关联也有3种方法,一是为每个几何面元指定材质编号,二是采用材质编号纹理映射法,然后通过材质编号在材质库中索引材质参数,三是直接制作材质参数纹理。纹理映射法较为方便,能够提高温度分辨率和材质分辨率,而为顶点指定温度或材质数据所得到分辨率要稍微低一些。
1.2 辐射计算
红外场景中的辐射计算包括自发辐射、反射辐射和大气衰减及程辐射。红外辐射计算方程可表示为:
pup=(emit+ref)+path(1)
式中:pup,emit,ref和path分别为红外热像仪入瞳辐亮度、自发辐射辐亮度、反射辐亮度以及大气路径辐射辐亮度;为大气路径透过率。
自发辐射计算较为直观,在已知温度及发射率的情况下,对普朗克公式进行波段积分即可。在红外场景仿真中,大气透过率和程辐射通常采用大气模型软件如LOWTRAN或MODTRAN来计算,这里不再详细说明。反射辐射取决于外界辐射源强度和材质的反射特性。不同于可见光波段仿真,在红外波段一切物体都是红外辐射源,所以应该考虑半球空间所有辐射源对反射辐射的贡献,半球空间辐射源通常包括天空、地面、太阳以及场景中的其他物体。半球空间反射辐射可表示为:
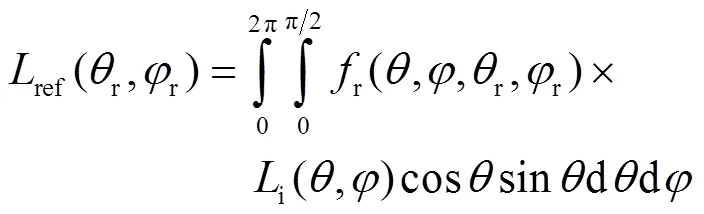
式中:r为双向反射分布函数;i为半球空间辐射源辐亮度。
但是上面的积分式在红外场景仿真中是很难计算的,主要解决途径有2个:一是采用Monte Carlo法对积分式进行求解,这在可见光仿真方面应用较广,适用于光线追迹渲染法;二是面对实时性需求,对积分表达式进行简化,常用于光栅渲染法。
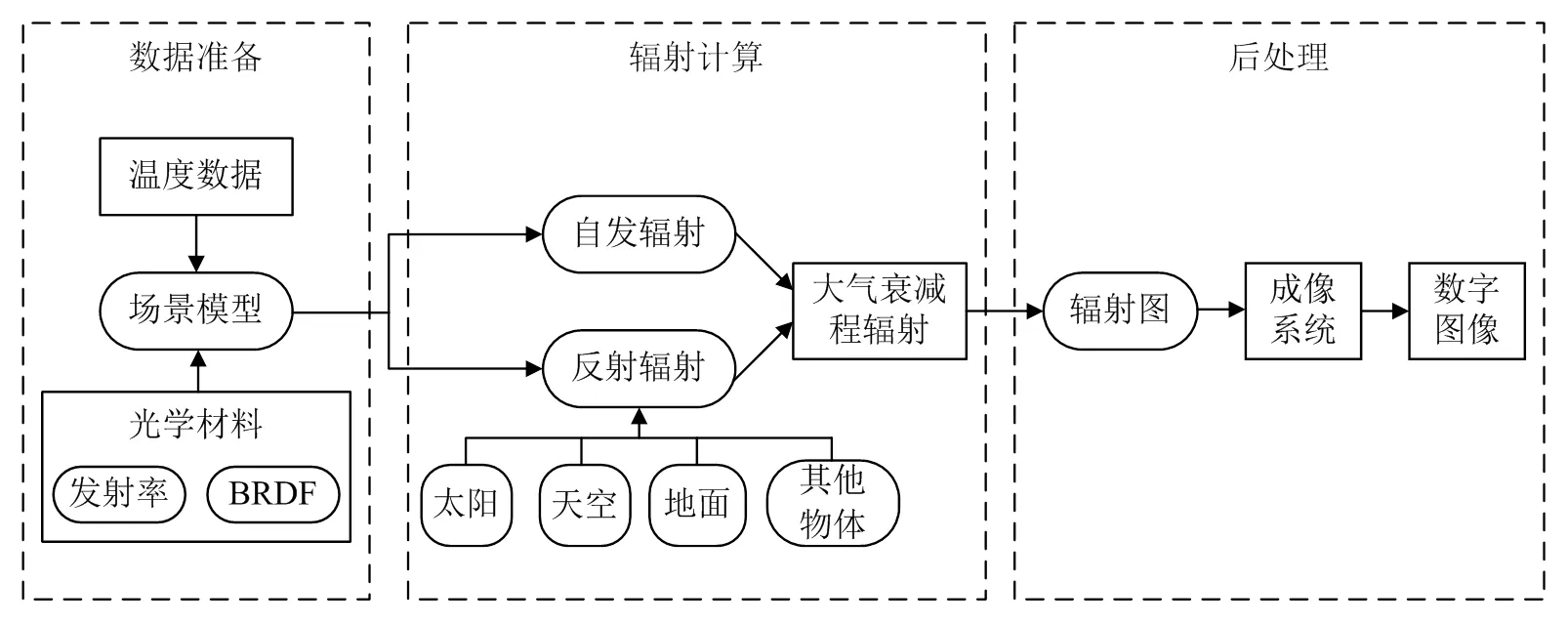
图1 红外场景仿真的3个阶段
红外场景仿真最关键的一步是可视化过程,即利用计算机图形学的相关理论,根据红外辐射计算模型,把三维场景渲染成二维红外辐射图像。渲染引擎可分为两大类:一类是光栅渲染引擎,它的典型代表有两大底层3D绘图编程接口程序OpenGL和Direct3D,以及在底层接口程序上封装而成的集成化渲染引擎OSG(Open Scene Graph)和OGRE(Object-Oriented Graphics Rendering Engine);另一类是光线追迹渲染引擎,它的典型代表有POV-Ray(Persistence of Vision Raytracer),以及基于GPU的并行光线追迹渲染引擎OptiX。
光栅渲染引擎采用透视投影算法生成二维图像,它可以利用GPU硬件结构进行并行绘制,渲染速度较快,常用于实时仿真。但是由于采用光栅插值法来确定面元内部辐射,计算精度不高,另外它无法体现光的反射、折射等特性,生成图像保真度不高。采用光栅渲染引擎进行红外场景仿真时,通常要用到可编程渲染管线,辐射计算模型在顶点渲染程序和片元渲染程序中执行。
光线追迹法从视点发射一系列穿过像平面的光线,每条光线对应像平面上的一个像素值。接着光线和场景中的物体进行相交判断,确定相交物体后根据辐射算法计算交点辐射值。最后把交点辐射值赋给像平面上对应的像素点,形成二维图像。光线追迹法能够表现光的基本属性如反射、折射等,因此辐射计算精度相对于光栅法要高。但是通常计算效率较低,无法达到实时渲染的要求。
国外红外仿真软件,如DIRSIG[5],SHIPIR[6],SE-RAY-IR[7],CAMEO-SIM[8]和MuSES[9],在辐射渲染计算时采用了光线追迹法来提高辐射计算精度,但是对于有实时性要求的场合,一般采用光栅渲染法,如Vega[10]、SE-FAST-IR[7]。
1.3 后处理
在红外场景仿真中,渲染引擎输出的是二维辐亮度图,接着红外成像系统把二维红外辐射信号转化为电信号,经数字化后生成数字图像。完整的红外场景仿真应该考虑红外成像系统的影响。成像系统对成像质量的影响可以从空间域仿真和频率域仿真来描述。成像系统仿真框图如图2所示。
成像系统的对图像质量的影响主要包括光学系统和探测器。其中光学系统对空域的影响包括镜头消光、像畸变以及渐晕效果,对频域的影响包括像差和衍射。探测器对空域的影响有光电转换、非均匀性响应、饱和、噪声以及电子增益,对频域的影响主要表现为光敏元空间响应、电子滤波以及电荷转移不完全。在近似条件下,可以把红外成像系统视为线性移不变系统,用调制传递函数(MTF)来描述成像系统对图像空间分辨率的影响[11]。
2 国外发展概况
国外对红外场景仿真的研究开始于20世纪80年代,经过30多年的发展,已经开发出一系列成熟的商业化仿真软件。在温度场计算方面,由早期的经验/半经验模型过渡到第一原理模型。然后着重于目标与背景的热交互以及提高辐射计算精度,同时致力于仿真软件的功能模块扩展。
2.1 经验/半经验模型
经验/半经验模型是指利用试验测量或经验模型得到的温度值或辐射值进行红外场景仿真。1980年,Jacobs采用一维热模型计算具有简单几何外形的物体表面温度[12],这是场景仿真的开端。接着Hinderer采用经验和测量数据对小型车辆进行了红外仿真[13]。随后Ben-Yosef等从统计的角度对自然地表的温度场进行了分析研究[14]。1985年,Kornfeld通过测量数据建立了温度分布的经验模型[15]。Biesel建立了物体表面热平衡方程,在一系列假设条件下,给出了物体温度的解析解[16]。1990年,Curtis等人建立了物体表面温度随时间、材质类型、气象条件以及物体方位变化的经验模型[17]。1997年,L.S.Balfor等通过几年时间对自然地表温度的测量,建立了地表温度关于太阳、天空、气温和风速的函数的通用表达式[18]。
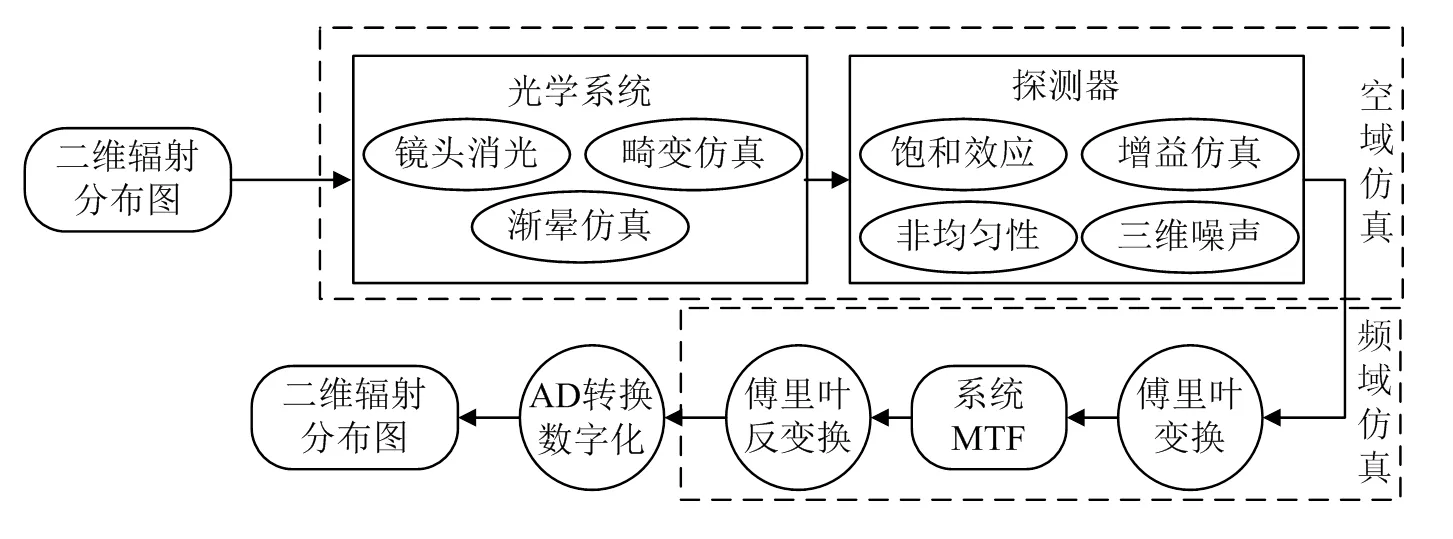
图2 红外成像系统仿真
经验/半经验模型通常建立在大量的试验观测数据之上,需要进行长期的观测,因此人力物力投入较大。另外由于观测地域有限,模型适用性受限。另外经验/半经验模型较为粗糙,无法反映温度的微小变化,温度精度不高。
2.2 第一原理模型
第一原理模型综合考虑影响物体温度变化的各种因素,建立物体的热平衡方程,通过数值计算求解物体表面的温度值。1987年,Gonda介绍了基于第一原理求解车辆温度的三维热传导模型PRISM,它较为全面地考虑了各种因素对物体温度变化的影响[19]。1988年,美国佐治亚理工学院的Sheffer等采用第一原理开发了红外场景图像生成系统GTVISIT,温度采用基于三维热网络法的GTSIG模块来计算。考虑了太阳天空辐射、传质过程(蒸发,冷凝,升华,降雨)、流体传输、遮挡和多次反射等对温度的影响[20]。1990年,DCS公司开发了一维热传导温度计算软件THERM,并被整合到仿真软件DIRSIG中[5]。1998年,Johnson介绍了ThermoAnalytics公司开发的替代PRISM用来进行红外信号分析的仿真工具MuSES,它是对PRISM的进一步扩展,集成了温度计算和红外仿真功能[9]。
以上这些模型代表了红外场景仿真发展的一个新阶段,研究者倾向于采用第一原理模型来计算物体表面的温度。通常这些模型都较为复杂,需要考虑气象条件、外界辐射源、传导、对流及热辐射损失,同时需要考虑目标的方位、工作状态、仿真地理位置和仿真时间等。
2.3 仿真精度的提高与功能扩展
作为红外场景仿真中的重要组成部分,温度求解的理论和方法已经形成,进一步提升的可能性不大。研究者开始把注意力转移到了仿真精度的提高和仿真功能的扩展上。为增加红外仿真图像纹理细节,Schott等提出一种为多光谱仿真图像添加红外纹理的方法[21]。2000年,Priest进行了偏振BRDF模型的推导和实验测量[22]。接着Meyers把该偏振模型加入到了DIRSIG仿真模型中[5],完成了从非偏红外仿真到偏振红外仿真的扩展。Haynes等人介绍了CAMEO-SIM在热阴影仿真方面的改进以及用于检验仿真质量的仿真评估系统FIRE[8]。Gonda等人研究了车辆与地表间红外辐射的影响,提出了目标与背景作用的4个等级,指出计算目标和背景温度时要考虑它们之间的相互影响[23]。
2008年,Kwan等介绍了高光谱仿真系统IRHSS,它采用高光谱版的MuSES来计算场景温度,辐射计算时采用了方向发射率、双向反射分布函数以及多次反射模型来确保计算结果的准确性[24]。2013年,Coiro采用基于Monte Carlo光线追迹的全局光照模型来计算飞行器红外辐射[25],提高了辐射计算的准确性。DIRSIG采用了新的分层光线追迹法来提高辐射计算精度[26]。
实际应用对仿真精度的要求不断提高,由此对模型进行了一系列改进。采用在计算反射辐射时,不再采用简单的反射模型,而是采用更加符合材质反射规律的BRDF模型。在进行目标与背景仿真时,不再把二者分割开分别建模,而是采用更加符合自然规律的交互模型。仿真过程中,不仅要求仿真结果满足物理规律,而且要求仿真图像具有逼近真实图像的纹理细节。与此同时,仿真的范围也不断扩展,由非偏振仿真扩展到偏振仿真,由波段仿真扩展到多光谱仿真和超光谱仿真。辐射计算时不断引入在可将光仿真方面发展较为成熟的算法,以提高辐射计算精度。
3 国内发展概况
国内在红外场景仿真方面的研究开始于20世纪90年代,相对于国外晚了10年左右的时间,因此整体水平相对落后。但总的来说,国内已对大量的红外目标和背景进行了红外成像建模与仿真,开发了集成仿真平台,并进行了仿真精度提升方面的工作。

图3 热阴影随时间的变化
1)自然地表仿真方面张建奇等进行了自然地表和植被地表温度场计算[27-29]。韩玉阁等提出了丛林温度与红外特征模型[30],接着利用随机模拟方法[31],概率统计方法和分形技术[32],模拟生成了自然地表的红外图像。宣益民采用马尔可夫随机场理论对可见光图像进行分割,计算不同区域热辐射生成红外图像[33]。邵晓鹏等建立了土壤与植被混合型地表的温度场理论模型[34]。柳倩结合土壤—植被混合地表的材质组成及空间分布特点,建立了温度场的耦合求解模型[35]。
2)目标仿真方面韩玉阁和宣益民等人进行了坦克车辆[36]、桥梁等目标的红外热辐射建模分析,建立了坦克运动过程中履带摩擦温度变化模型[37],坦克火炮发射过程中炮膛的温升模型[38],动力舱表面温度模型[39],进而模拟出了坦克的红外图像。罗来科采用三维有限元计算了水陆坦克的温度分布情况,生成了水陆坦克和背景的红外模拟图像[40]。王章野对城市场景进行了红外仿真建模,采用一维有限差分法计算出了城市路面、建筑等表面不同时刻的温度,实现了动态红外场景的实时生成和虚拟漫游[41]。
3)集成仿真方面2007年左右,西安电子科技大学红外技术实验室开始采用集成化的渲染OGRE进行实时动态红外场景的生成工作,开发了红外场景仿真平台PRISSE[42-45],实现了中波和长波辐射仿真,考虑了大气效应和探测器效应。该平台辐射计算过程采用可编程渲染管线在GPU中进行,编程语言为Cg,相关数据由DDS浮点纹理传入GPU。PRISS本身不具备温度场的计算功能,它只是根据现有的温度数据、光学参数以及大气数据来生成红外辐射图。类似的还有北京邮电大学基于OSG开源渲染引擎的红外场景仿真系统[46],电子科技大学基于OGRE渲染引擎的仿真系统[47]。
4)提升仿真精度方面赵灿用可见光微观纹理对宏观均值温度进行调制来生成红外纹理[48]。张鑫对比研究各种BRDF反射模型,采用Schlick BRDF模型来进行红外反射辐射计算[4]。韩玉阁建立运动车辆和地面之间热学以及力学的模型[36]。黄曦对包含光谱积分的辐射传输方程进行了去耦合,采用有效平均值来替代光谱积分式以提高了准确度[49]。吴鑫提出了一个BRDF模型用于大规模场景中波红外仿真[50]。接着吴鑫又对仿真场景中面元的可见性进行判断,进而求出面元间相互反射辐射,提升了反射辐射计算精度[51]。
北京理工大学的李宏宁自建基于CPU的光线追迹渲染引擎,进行了红外场景仿真,生成了多波段红外辐射图像[52]。胡海鹤采用OpenGL渲染引擎开发了基于数据库查表法的红外场景仿真软件[53]。笔者目前主要进行了三方面的工作。
采用OptiX并行光线追迹渲染引擎进行大规模自然场景温度场计算,该方法利用了GPU的并行运算能力,能够显著提高计算效率。在温度计算时考虑了太阳光遮挡效果,能够生成温度阴影,此外采用反向纹理映射法保存温度数据提高了温度分辨率。不同时刻温度计算结果如图4所示。
采用OptiX并行光线追迹渲染引擎进行红外仿真平台的开发,提出了多路径光线追迹法进行半球空间采样来提高辐射计算精度,并采用了Monte Carlo法和重要采样法来加快积分求解收敛速度。该平台中波和长波渲染效果如图5所示。
采用OSG集成渲染引擎开发了大规模场景实时红外仿真系统,用于自寻的红外制导系统闭环仿真。传感器效应仿真模块采用了GPU CUDA并行算法来处理。对于11km×9km的大规模场景,渲染尺寸为640×480的图像,帧频可达到60Hz。不同时刻长波仿真效果图如图6所示。
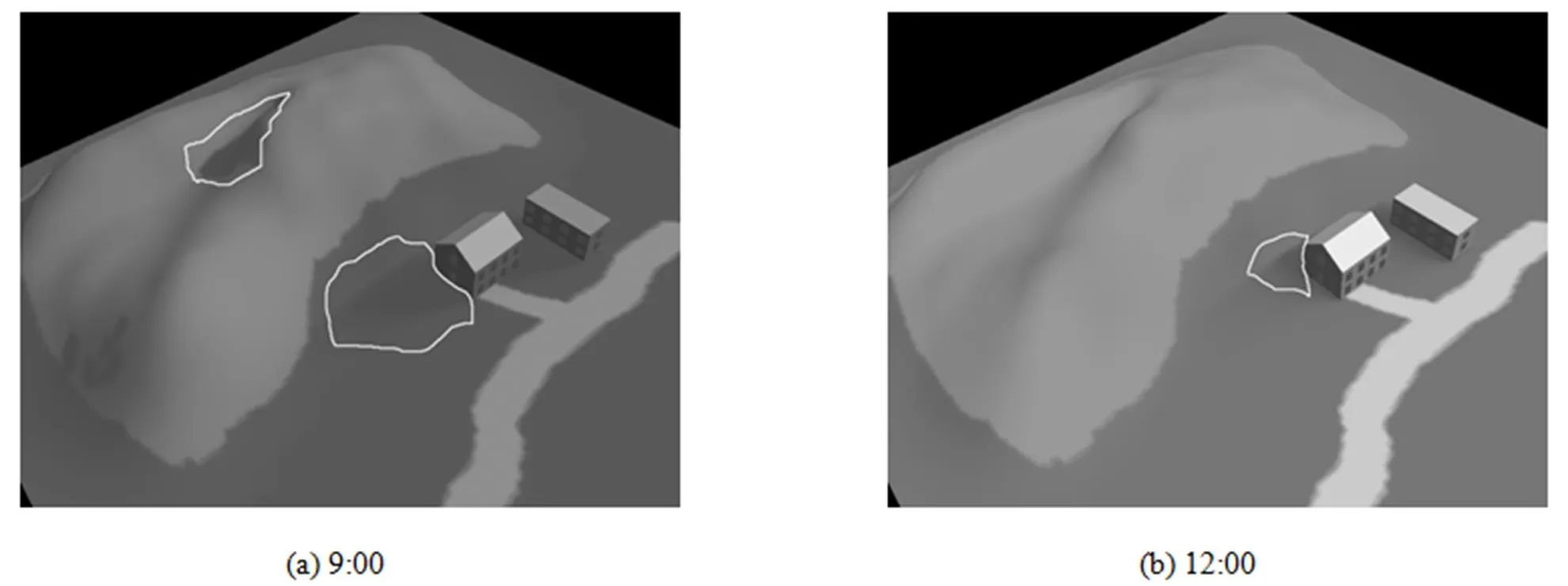
图4 不同时刻温度效果图
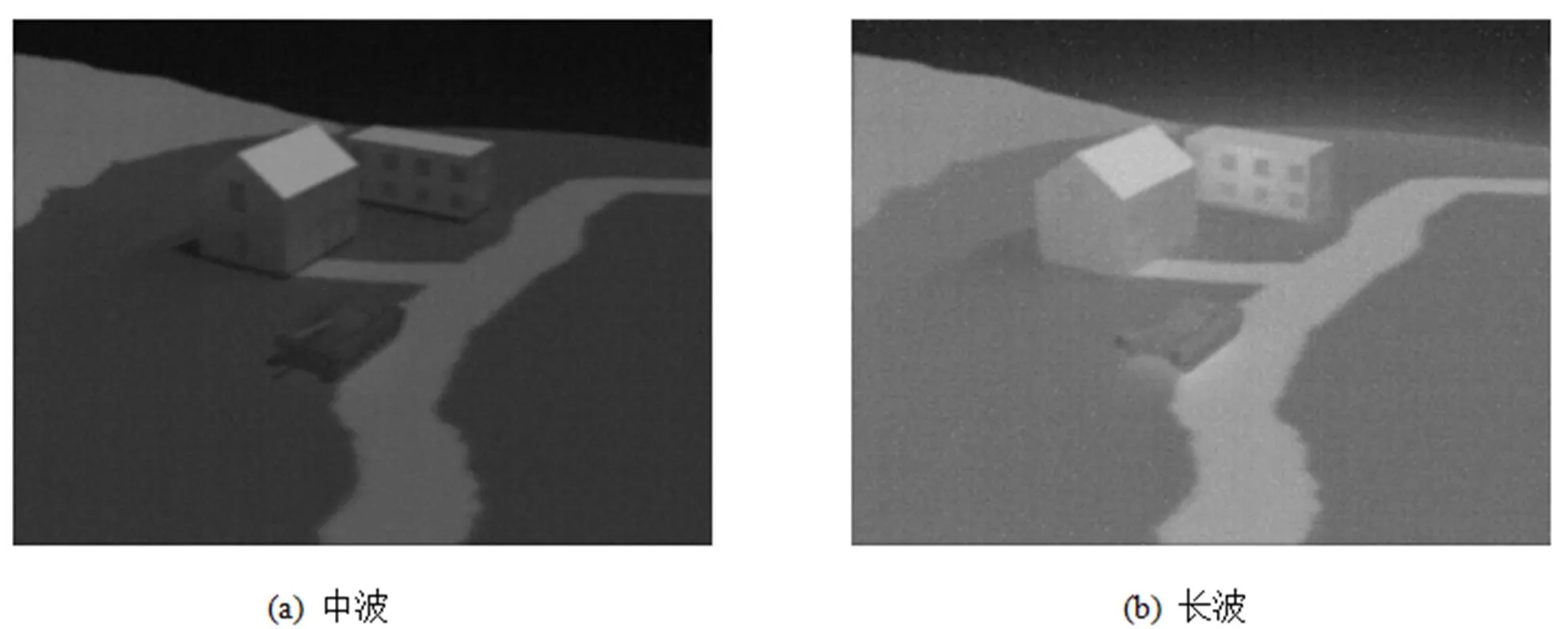
图5 不同波段仿真效果图
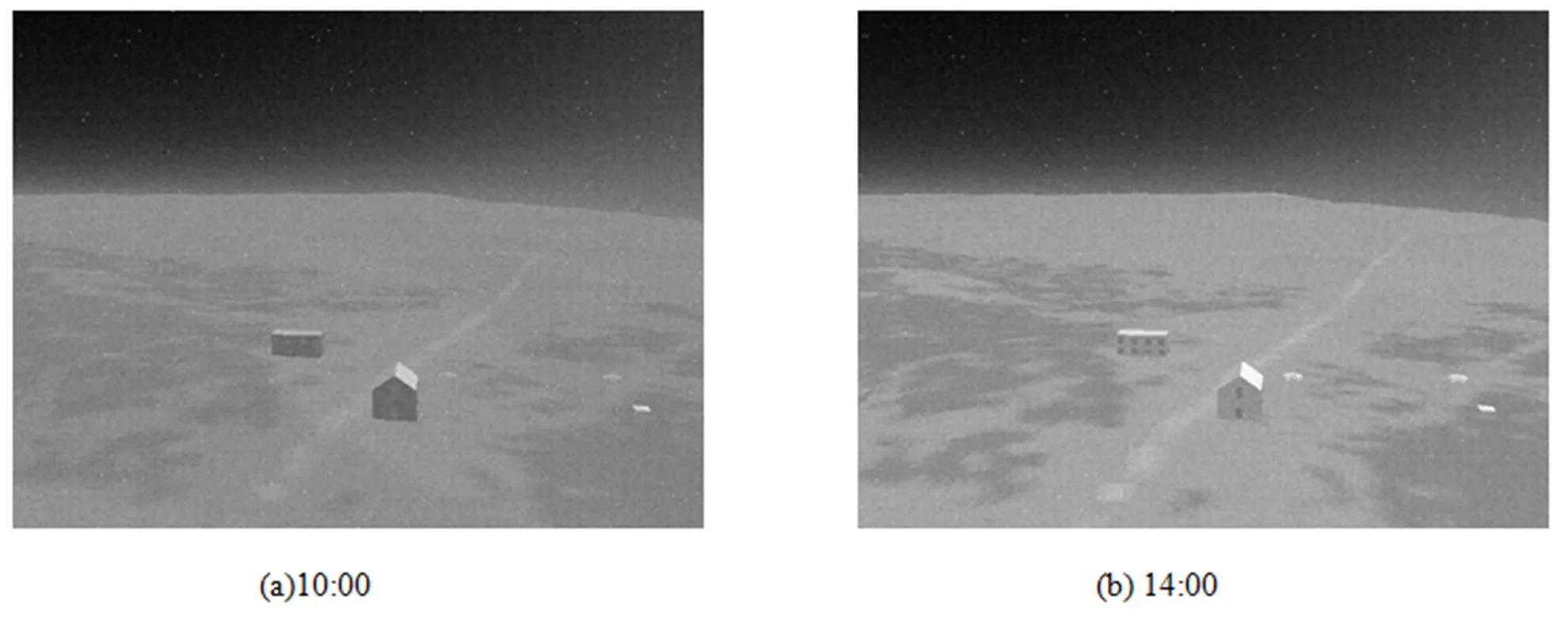
图6 长波不同时刻仿真效果图
4 结语
红外场景仿真技术对红外成像系统性能评估、成像成像系统设计、红外武器部署选型等具有重要的指导意义。但是国内在这方面的研究仍然不够,首先国内缺乏对仿真材质库的建设,因此仿真结果的准确性无法保证。其次国内对红外场景仿真的验证工作不够,缺乏系统性的验证手段。另外国内仿真软件的集成度不够,通常为特定用途开发,通用性不强,功能单一,无法形成具有商用价值的软件。最后,温度场是提前计算好导入到仿真系统中的,对实际场景中的物体在交互过程中所涉及的物理变化考虑不够。总的来说,国内在红外场景仿真方面还有很长的路要走。
[1] 吴军辉, 李慧, 许振领, 等. 红外捕获跟踪设备闭环注入式仿真试验的理论研究[J]. 红外与激光工程, 2012, 41(12): 3166-3171.
[2] 张伟钢, 徐国跃, 薛连海. 低红外发射率材料研究进展[J]. 红外技术, 2015, 37(5): 361-367.
[3] 乔立永, 徐立新, 高敏. 红外目标识别图像复杂度度量方法综述[J]. 红外技术, 2013, 35(2): 88-96.
[4] 张鑫. 基于GPU编程的红外反射特性建模与仿真[D]. 西安: 西安电子科技大学, 2012.
[5] Meyers J. Modeling Polarimetric Imaging using DIRSIG[D]. Rochester: Rochester Institute of Technology, 2002.
[6] Vaitekunas D A. Validation of ShipIR (V3.2): methodology and results[C]//, 2006, 6239: 1-12.
[7] Latger J, Cathala T, Douchin N, et al. Simulation of active and passive infrared images using the SE-WORKBENCH[C]//, 2007, 6543: 1-15.
[8] Andrew W. Haynes, Marilyn A. Gilmore, Filbee D R, et al. Accurate scene modeling using synthetic imagery[C]//, 2003, 5075: 85-96.
[9] Keith Johnson A C, David Less, Derrick Levanen, et al. MuSES: A New Heat and Signature Management Design Tool for VirtualPrototyping[C]//, 1998.
[10] 郑小宝, 王仕成, 廖守亿, 等. 基于Creator和Vega的红外图像实时生成软件设计[J]. 红外技术, 2008, 30(10): 575-579.
[11] Holst G C.[M]. Washington: SPIE Press, 2008: 300-312.
[12] Jacobs P a M.[M]. T.N.O., 1980.
[13] Hinderer J. Model for generating synthetic three -dimensional (3D) images of small vehicles[C]//, 1981, 302: 8-13.
[14] Ben-Yosef N, Rahat B, Feigin G. Simulation of IR images of natural backgrounds[J]., 1983, 22(1): 190-194.
[15] Kornfeld G H. Computer generation of infrared imagery[J]., 1985, 24(24): 4534.
[16] Biesel H, Rohlfing T. Real-Time Simulated Forward Looking Infrared (FLIR) Imagery For Training[C]//, 1987, 781: 71-80.
[17] Curtis J O, Rivera S. Diurnal and seasonal variation of structural element thermal signatures[C]//, 1990, 1311: 136-145.
[18] Balfour L S, Bushlin Y. Semi-empirical model-based approach for IR scene simulation[C]//'97., 1997, 3061: 616-623.
[19] Gonda T G, Jones J C, Gerhart G R, et al. PRISM Based thermal Signature Modeling Simulation[C]//, 1988.
[20] Sheffer A D, Cathcart J M. Computer Generated IR Imagery: A First Principles Modeling Approach[C]//, 1988, 933: 199-206.
[21] John R. Schott, Salvaggio C N, Brown S D, et al.Incorporation of texture in multispectral synthetic image generation tools[C]//, 1995, 2469: 189-196.
[22] Priest R G. Polarimetric microfacet scattering theory with applications to absorptive and reflective surfaces[J]., 2002, 41(5): 169-181.
[23] Gonda T, Less D, Filbee D, et al. An explanation of vehicle-terrain interaction in IR synthetic scenes[C]//, 2003, 5075: 9-19.
[24] Yit-Tsi Kwan, Steven Sawtelle, Uri Bernstein, et al. A simulation for hyperspectral thermal IR imaging sensors[C]//, 2008, 6966: 1-11.
[25] Coiro E. Global Illumination Technique for Aircraft Infrared Signature Calculations[J]., 2013, 50(1): 103-113.
[26] Digital Imaging and Remote Sensing Laboratory, Rochester Institute of Technology. Radiometry Solvers[EB/OL]. Accesson [2015.06.12]. http://www.dirsig.org/docs/new/.
[27] 张建奇, 方小平, 张海兴, 等. 自然环境下地表红外辐射特性对比研究[J]. 红外与毫米波学报, 1994, 13(6): 418-424.
[28] 张建奇, 方小平, 张海兴, 等. 植被红外辐射统计特性理论模型[J]. 西安电子科技大学学报, 1997, 24(3): 76-80.
[29] 张建奇,白长城,张海兴. 植被热红外辐射特性理论建模[J]. 西安电子科技大学学报, 1994, 21(2): 157-161.
[30] 韩玉阁, 宣益民, 汤瑞峰. 丛林随机生成模型及其红外特征模拟[J]. 红外与毫米波学报, 1999, 18(4): 45-50.
[31] 韩玉阁, 宣益民. 自然地表红外图像的模拟[J]. 红外与激光工程, 2000, 29(2): 57-64.
[32] 韩玉阁, 宣益民. 天然地形的随机生成及其红外辐射特性研究[J]. 红外与毫米波学报, 2000, 19(2): 129-133.
[33] 宣益民, 李德沧, 韩玉阁. 复杂地面背景的红外热像合成[J]. 红外与毫米波学报, 2002, 21(2): 133-136.
[34] 邵晓鹏, 常蓬勃, 徐军. 土壤与植被混合型地表的温度场特性分析[J]. 西安电子科技大学学报, 2009, 36(1): 122-126.
[35] 柳倩, 朱枫, 郝颖明, 等. 土壤—植被混合地表红外辐射温度场的耦合建模方法[J]. 计算机应用研究, 2011, 28(12): 4589-4592.
[36] 韩玉阁, 成志铎, 任登凤, 等. 装甲车辆与地面背景的热交互作用及红外仿真[J]. 红外与激光工程, 2013, 42(1): 20-25.
[37] 韩玉阁, 宣益民, 汤瑞峰. 摩擦接触界面传热规律研究[J]. 南京理工大学学报, 1998, 22(3): 68-71.
[38] 韩玉阁, 宣益民. 坦克炮身管温度分布及红外辐射特性[J]. 应用光学, 1998, 19(2): 9-15.
[39] 韩玉阁, 宣益民. 坦克动力舱内的热特性[J]. 红外技术, 2000, 22(3): 23-26.
[40] 罗来科. 水陆坦克与背景红外辐射特性研究[D]. 南京: 南京理工大学, 2009.
[41] 王章野. 地面目标的红外成像仿真及多光谱成像真实感融合研究[D]. 杭州: 浙江大学, 2002.
[42] 李勇. 基于GPU的实时红外图像生成方法研究[D]. 西安: 西安电子科技大学, 2007.
[43] 王健. 基于目标特征模型和GPU的红外场景仿真方法研究[D]. 西安: 西安电子科技大学, 2008.
[44] 许星. 基于渲染引擎的实时红外场景仿真框架及实现方法研究[D]. 西安: 西安电子科技大学, 2009.
[45] 林凯. 一种模块化实时红外场景仿真系统研究[D]. 西安: 西安电子科技大学, 2010.
[46] 黄建峰. 基于OSG的红外场景仿真技术的研究[D]. 北京: 北京邮电大学, 2012.
[47] 郭杰. 基于OGRE的实时红外视景生成技术研究与应用[D]. 成都: 电子科技大学, 2012.
[48] 赵灿. 面向OGRE的红外纹理设计与生成方法研究[D]. 西安: 西安电子科技大学, 2010.
[49] Huang X, Zhang J, Zhang S, et al. GPU-based high-precision real-time radiometric rendering for IR scene generation[J]., 2014, 65: 134-143.
[50] Wu X, Zhang J, Chen Y, et al. Real-time mid-wavelength infrared scene rendering with a feasible BRDF model[J]., 2015, 68: 124-133.
[51] Wu X, Zhang J. Signature simulation of infrared target by tracing multiple areal sources[J]., 2015, 54(13): 3842-3848.
[52] 李宏宁. 数字化三维场景仿真[D]. 北京: 北京理工大学, 2011.
[53] 胡海鹤. 红外视景仿真关键技术研究[D]. 北京: 北京理工大学, 2015.
Overview on Development of Infrared Scene Simulation
WANG Xia,WANG Hao,XU Chao,BAI Ting-zhu,JIN Wei-qi
(,,100081,)
Infrared scene simulation technology has promising application in military area. The three stages of infrared scene simulation are introduced in this paper, which include data preparation, radiation calculation and post-processing. Related work and approaches during each stage are also briefly described. In addition, according to the development history of infrared scene simulation, a systematical conclusion on research done by foreign scholars is made. An overview of domestic studies on infrared scene simulation is given as well. After that, a succinct introduction to our current work is presented. Finally, we point out the present problems exiting in domestic research on infrared scene simulation.
infrared scene simulation,radiation calculation,rendering engine
TP391.9
A
1001-8891(2015)07-0537-07
2015-06-15;
2015-07-10。
王霞(1972-),女,副教授,博士生导师,主要从事光电检测、光谱分析及微光与红外成像方面的研究。E-mail:angelniuniu@bit.edu.cn。
国家自然基金重点项目,编号:61231014。
猜你喜欢
环球时报(2022-05-23)2022-05-23
疯狂英语·新读写(2021年8期)2021-11-05
金桥(2021年4期)2021-05-21
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
作文小学中年级(2020年6期)2020-07-24
电子制作(2019年7期)2019-04-25
小学生优秀作文(高年级)(2018年4期)2018-09-11
光学精密工程(2016年3期)2016-11-07
少儿科学周刊·儿童版(2016年1期)2016-03-14
山东青年(2016年1期)2016-02-28