基于跟踪微分器的滚仰式成像导引头视线角速率估计
2015-03-29 05:59:52韩宇萌贾晓洪赵桂瑾史晓刚
红外技术 2015年7期
韩宇萌,贾晓洪,赵桂瑾,史晓刚
基于跟踪微分器的滚仰式成像导引头视线角速率估计
韩宇萌,贾晓洪,赵桂瑾,史晓刚
(中国空空导弹研究院,河南 洛阳 471009)
针对滚仰式半捷联成像导引头难以直接获得精确的视线角速率这一问题,提出利用弹体姿态角速率、失调角、框架滚仰角等信息解算出惯性系下的视线角的方法。针对解算出的惯性系下的视线角,通过选择合适的跟踪微分器提取出惯性系下的视线角速率信息。仿真试验表明,选择合适的跟踪微分器能够在大背景噪声下对惯性系下解算出的视线角连续平滑地微分,进而可得到精确的视线角速率。
成像导引头;视线角;视线角速率;跟踪微分器
0 引言
随着现代战争的发展,武器系统要求导弹在精确击中目标之外,还要具有体积小、重量轻、机动性好、成本低等优点。采用传统稳定平台的导引头,其体积和重量偏大、成本偏高,与高性能武器系统的发展不相适应。陀螺离台和探测器离台的滚仰式半捷联稳定平台采用滚转式外框架、俯仰式内框架的平台结构,可以实现整个前半球视场的稳定和跟踪,其结构形式简单,具有体积小、成本低的优点[1-3]。但陀螺离台和探测器离台的滚仰式半捷联稳定平台上没有惯性速率传感器,其稳定平台的内外框架角速度不能直接测得,导致惯性视线角速率无法直接测量获得。因此如何精确地估计出视线角速率是陀螺离台和探测器离台的滚仰式半捷联导引头面临的一个重要问题。
为了解决这一问题,许多学者开展了滚仰式半捷联稳定平台惯性视线角速率提取的相关研究,常用的方法是采用现代滤波技术进行视线角速率估计。如文献[4]通过目标跟踪模型和卡尔曼滤波算法来间接提取半捷联稳定平台的视线角速率信息,文献[5]采用无损卡尔曼滤波的方法来重构视线角速率信息。但是采用现代滤波技术进行视线角速率估计时,如果对整个系统的建模不精确、或对整个系统缺乏一定的先验知识、或对系统噪声标定不准确,就会导致滤波结果不准确,无法进行工程应用。随着微分器理论的日益完善,选择合适的跟踪微分器可以从不连续或含有噪声的信号中提取出连续滤波信号和微分信号,并且其估计精度也较高[6-7]。
针对陀螺离台和探测器离台的滚仰式半捷联稳定平台,本文首先利用速率陀螺测得的弹体姿态角速率、探测器测得的失调角、角度传感器测得的框架角解算出惯性系下的视线角。然后选择合适的跟踪微分器计算出惯性系下的视线角速率信号。仿真试验证明,本文采用跟踪微分器法来求解陀螺离台和探测器离台的滚仰式半捷联成像导引头在惯性系下的视线角速率,该方法原理简单,实现方便,能够在大背景噪声下以较高的精度获得视线角与视线角速率的估计值,具有一定的工程应用价值。
1 坐标系定义
坐标系原点选取在导引头位标器的回转中心,其主要坐标系如图1所示。
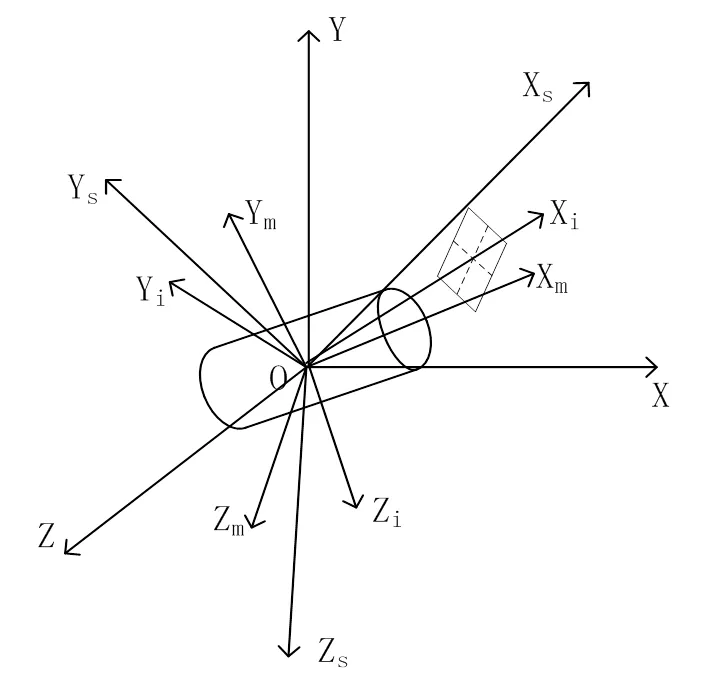
图1 主要坐标系定义
惯性坐标系依次绕轴转过、绕¢轴转过、绕m轴转过得到弹体坐标系mmm;弹体坐标系依次绕m轴转过s、绕OZ轴转过s得到内框坐标系iii;内框坐标系依次绕i轴转过、绕s轴转过得到视线坐标系sss。由此可以得到惯性坐标系到视线坐标系的变换矩阵=(,,s,s,,,)。另一方面,惯性坐标系依次绕轴、¢轴、OX轴转过3个欧拉角、、可得到视线坐标系sss。惯性坐标系到视线坐标系的变换矩阵可记为¢=(,,)。
根据惯性坐标系到视线坐标系sss的变换矩阵,可以得到等式=¢即(,,s,s,,,)=(,,)成立。因此,可以根据变换矩阵相等,解算出偏航视线角、俯仰视线角和滚转视线角值,进而通过选择合适的跟踪微分器提取出目标的视线角速率。
2 视线角速率提取算法
陀螺离台和探测器离台的滚仰式半捷联稳定平台由于其速率陀螺安装在弹体基座上,不能直接给出目标的视线角速率信息。但利用框架偏转角、目标相对稳定平台的失调角以及陀螺测量的弹体角速率信息可以解算出目标在惯性系下的视线角信息[8-9],进而可利用跟踪微分器提取出目标的视线角速率信息。图2为滚仰式半捷联导引头提取目标视线角速率的原理图。
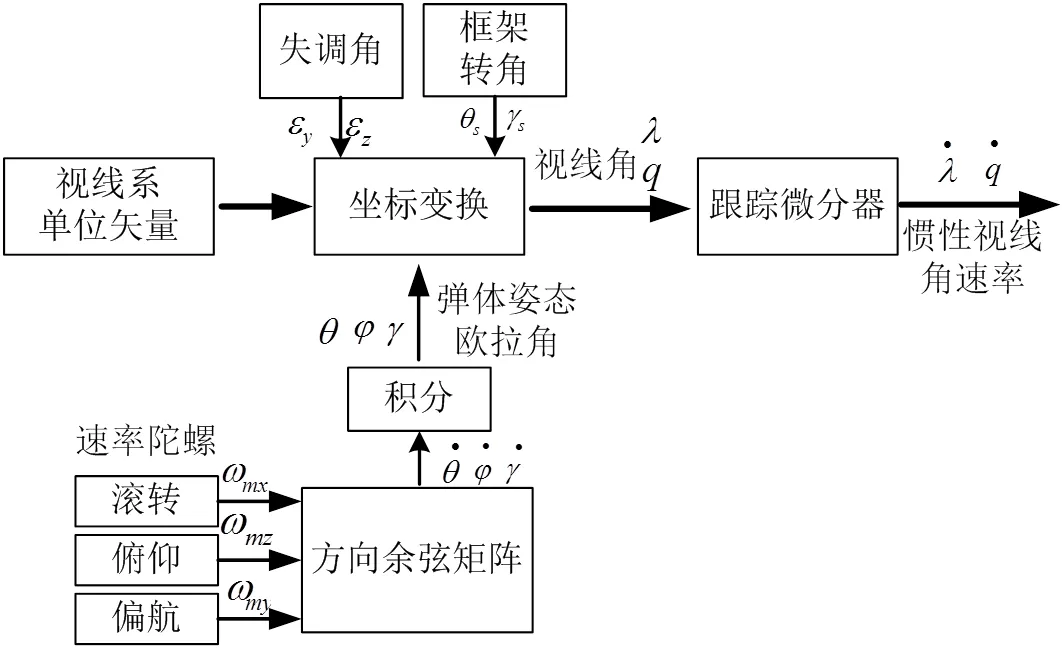
图2 滚仰式半捷联导引头视线角速率提取原理

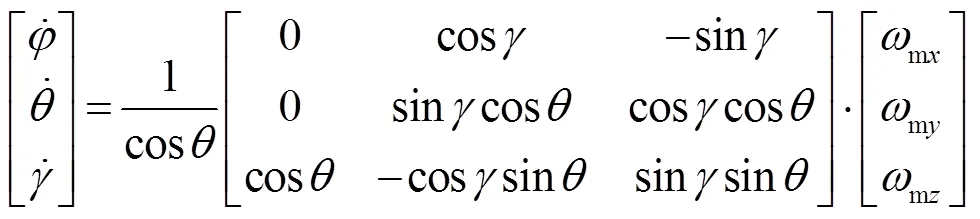
根据式(1)结果,通过积分运算可以得到弹体姿态角[]。根据惯性坐标系到视线坐标系的变换矩阵=(,,s,s,,,),通过坐标变换可以求得沿视线坐标系轴方向的单位矢量在惯性坐标系下的投影:

同理,根据惯性坐标系到视线坐标系的变换矩阵¢=(,,),通过坐标变换可以求得沿视线坐标系轴方向的单位矢量在惯性系下的投影:

联立式(2)、(3)、(4)可以得到偏航视线角和俯仰视线角:
3 跟踪微分器
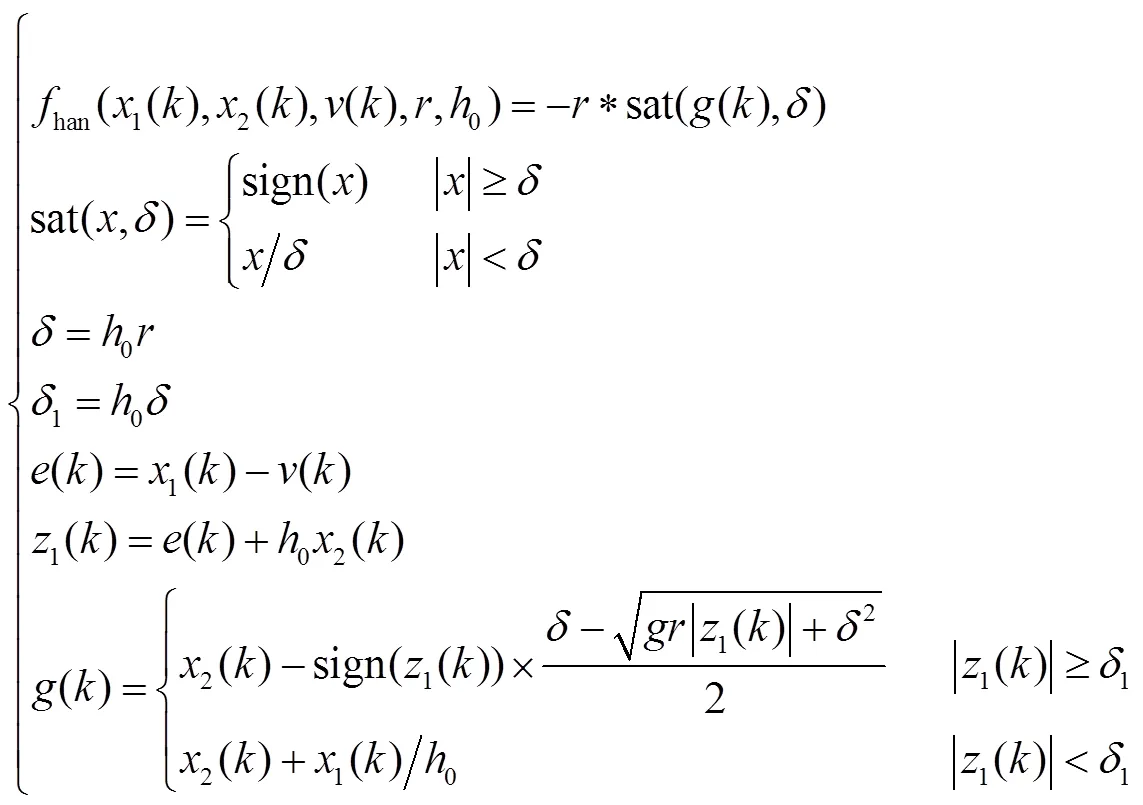
在实际工程应用中,通过角度传感器测量得到的角度信号通常含有噪声,采用直接数值微分的方法可以减小信号延迟,但是直接微分法会引起噪声放大,导致提取到的角速度信号无法使用。通过构造合适的非线性跟踪微分器,可以从含有噪声的测量信号中提取连续滤波信号和微分信号。设输入信号为(),经过非线性跟踪微分器后输出1()和2(),其中2()可作为1()的微分,1()能快速跟踪输入信号()。非线性跟踪微分器能无超调的快速跟踪输入信号,具有较强的滤波功能,经过非线性跟踪微分器得到的微分信号品质也较高,因而非线性跟踪微分器具有广泛的应用范围[10]。其离散形式为:

参数设计决定了跟踪微分器的微分效果,积分步长决定了跟踪微分器的微分精度,滤波因子0决定了跟踪微分器的滤波效果,快速因子决定了跟踪微分器的跟踪速度,适当地调节这3个参数的值可使跟踪微分器的微分效果达到最佳。离散形式中的具体参数如式(7)所示:
研究表明,对于含有噪声的信号,当0>时跟踪微分器具有较好的滤波功能。滤波因子0越大,踪微分器的滤波效果就越好但跟踪信号的相位损失也越严重。速度因子越大,踪微分器跟踪信号就越快但噪声放大也越严重。为了使踪微分器具有较好的滤波效果,滤波因子0和速度因子需要综合权衡考虑,调整到合适的范围。
4 仿真结果及分析

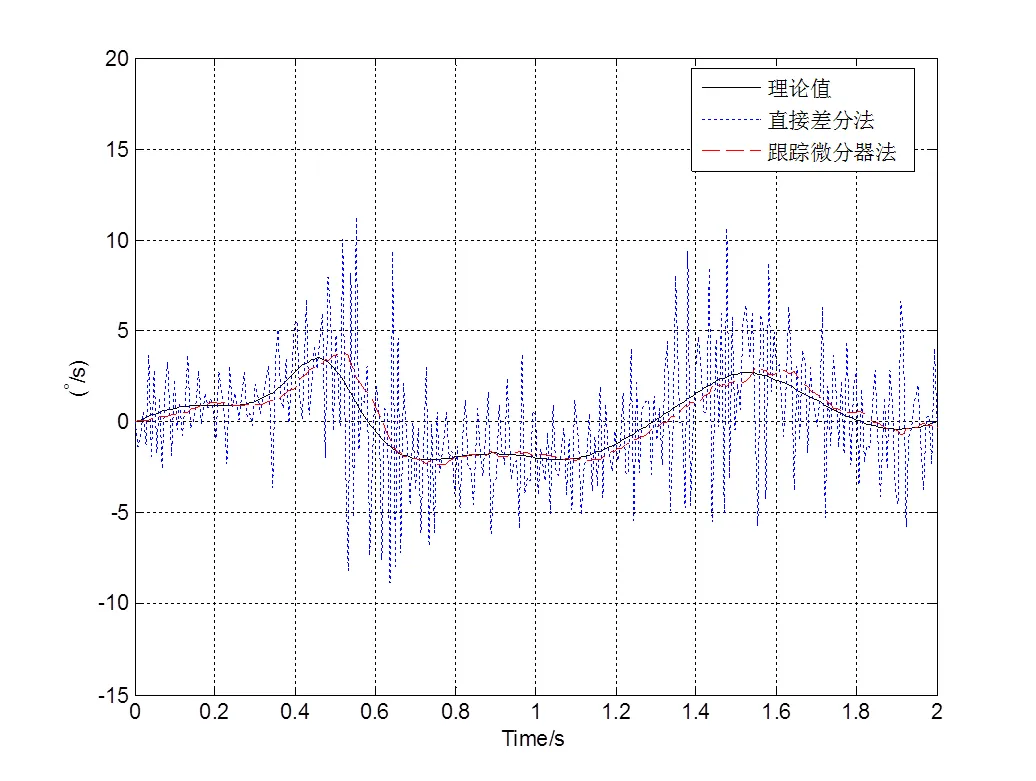
图3 稳定方式下偏航视线角速率的计算结果
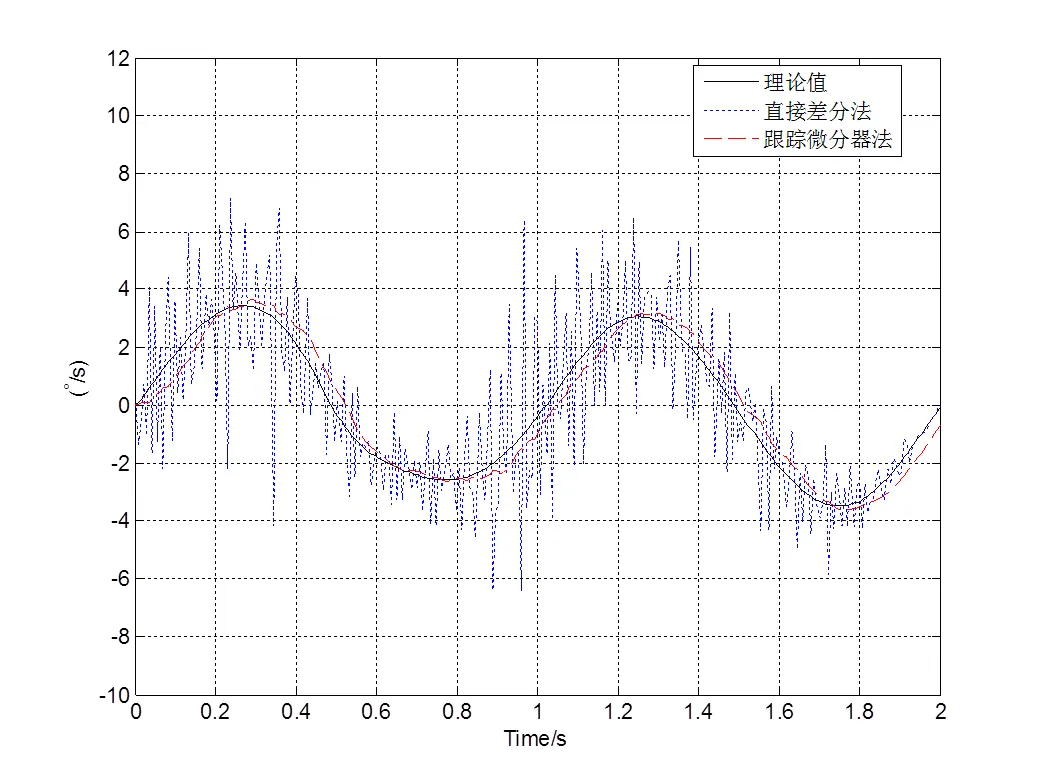
图4 稳定方式下俯仰视线角速率的计算结果
在跟踪方式下,取速率陀螺测量的弹体相对惯性空间的角速度在弹体系下的分量为mx=2sin(3p)、my=2sin(1.5p)、mz=3sin(2p),框架的运动形式为s=-5.2、s=0.53,假定弹体的初始姿态角0=0=0=0,初始框架角s0=0、s0=0.03,在方位角和高低角中引入均值为0,方差为10-4的高斯白噪声,解算出惯性系下的视线角速率。仿真分析中,对比了直接差分法与非线性跟踪微分器法求取视线角速率的计算结果,如图5和图6所示。
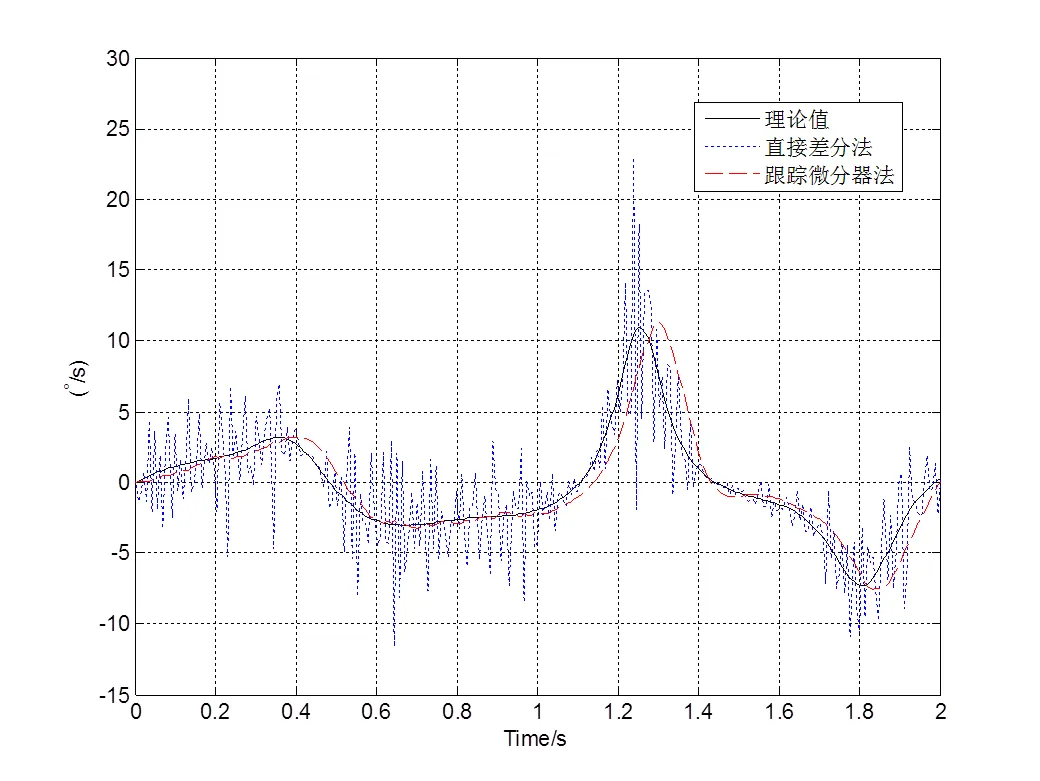
图5 跟踪方式下偏航视线角速率的计算结果

图6 跟踪方式下俯仰视线角速率的计算结果
由以上分析可知,测量噪声对直接差分法求解视线角速率影响较大,直接差分法计算结果与理论值偏差较大。选择合适的非线性跟踪微分器可以从含有噪声的测量信号中连续平滑的提取微分信号,计算结果与理论值相差较小,但经过非线性跟踪微分器后信号略有延迟。对于采用气动力控制的战术导弹而言,由于飞控系统指令响应时间远大于跟踪微分器法带来的视线角速率延时,视线角速率信号延时对这类战术导弹制导控制系统的影响可以忽略不计。对于采用直接力/气动力复合控制的战术导弹而言,由于制导末端引入直接力控制后飞控系统指令响应时间大幅减少,跟踪微分器法带来的视线角速率信号的延时需要进一步研究处理。
5 结论
本文首先利用弹载陀螺测出的弹体姿态角速率、探测器测得的失调角、角度传感器测得的框架角解算出惯性系下的视线角,然后利用非线性跟踪微分器提取惯性系下的视线角速率。仿真试验表明,本文解算惯性系下视线角的方法正确,针对解算出的视线角采用合适的跟踪微分器能够在大背景噪声下,以较高的精度估计出视线角速率。该方法原理简单,实现方便,具有一定的工程应用价值。
[1] 林德福, 王志伟, 王江. 滚仰式导引头奇异性分析与控制[J]. 北京理工大学学报, 2010, 30(11): 1265-1269.
[2] Zarchan P.[M]. Massachusetts: American Institute of Aeronautics and Astronautics, 2012.
[3] 杨晓英, 崔得东. 红外成像导引头角跟踪系统仿真分析[J]. 红外与激光工程, 2007, 36(1): 39-42.
[4] 贾筱媛, 赵超. 半捷联稳定控制方案与制导信息提取方法[J]. 红外与激光工程, 2011, 40(12): 2474-2479.
[5] 宋建梅, 孔丽霞, 范健华. 半捷联图像寻的制导系统导引信息构造方法[J]. 兵工学报, 2010, 31(12): 1573-1579.
[6] 韩京清. 自抗扰控制技术[M]. 北京: 国防工业出版社, 2009.
[7] 王新华, 刘金琨. 微分器设计与应用[M]. 北京:电子工业出版社, 2010.
[8] 花文涛, 丁海山, 贾晓洪, 等. 成像导引头光轴与视线之间相对运动的研究[J]. 红外技术, 2014, 36(1): 31-36.
[9] 花文涛, 刘凯, 丁海山. 滚仰式红外导引头视线角速率提取方法研究[J]. 红外技术, 2015, 37(1): 63-66.
[10] 韩京清, 袁露林. 跟踪微分器的离散形式[J]. 系统科学与数学, 1999(3): 268-273.
Line-of-sight Rate Estimation Based on the Tracking Differentiator for Roll-pitch Imaging Seeker
HAN Yu-meng,JIA Xiao-hong,ZHAO Gui-jin,SHI Xiao-gang
(,471009,)
For roll-pitch semi-strapdown imaging seeker, it is difficult to obtain accurate line-of-sight rate directly. According to attitude angle rate of the missile, offset angle, and the angle of the roll-and-pitch platform, the angle of line-of-sight for roll-pitch imaging seeker can be calculated in the inertial space. Then, the angle rate of line-of-sight can be solved by selecting appropriate tracking differentiator. The simulation results show that the differentiated signals of the angle of line-of-sight can be smoothly solved by selecting appropriate tracking differentiator under strong background noise. Then, the angle rate of line-of-sight can be accurately obtained.
imaging seeker,line-of-sight,angle rate of line-of-sight,tracking differentiator
TP391.41
A
1001-8891(2015)07-0598-04
2015-03-23;
2015-05-24。
韩宇萌(1985-),男,河南洛阳人,博士,主要从事导航、制导与控制方向的研究工作。
航空科学基金项目,编号:2013ZC12004。
猜你喜欢
特区文学·诗(2021年6期)2021-12-22 01:02:51
金色少年(奇趣科普)(2017年11期)2017-11-28 05:41:41
北京航空航天大学学报(2017年5期)2017-11-23 05:53:18
北京航空航天大学学报(2017年12期)2017-04-23 08:31:50
制导与引信(2016年3期)2016-03-20 16:01:58
火控雷达技术(2016年1期)2016-02-06 02:18:01
当代贵州(2015年19期)2015-06-13 09:42:32
弹箭与制导学报(2015年1期)2015-03-11 15:32:08
弹箭与制导学报(2015年1期)2015-03-11 15:32:06
新疆农垦科技(2014年9期)2014-02-28 19:21:04