
无线消防队员火场定位及救援系统的研究
2015-03-22 05:18:02王庆辉刘华月魏立峰
沈阳化工大学学报 2015年3期
王庆辉, 刘华月, 魏立峰
(沈阳化工大学 信息工程学院, 辽宁 沈阳 110142)
无线消防队员火场定位及救援系统的研究
王庆辉, 刘华月, 魏立峰
(沈阳化工大学 信息工程学院, 辽宁 沈阳 110142)
当消防员处于危急的火灾现场中,对遇险消防员进行救助极为重要.在进行队员搜救时,及时的对被救消防员进行搜救才能保障消防员的安全,因此,必须采取先进的搜救系统.提出一种基于无线定位和PDR自主导航相融合的定位方法,根据PDR推算的虚拟标定点位置信息及无线传感器的测距信息对被救人员的位置进行计算.通过此方法不仅得到了有效的数据,而且相对于其他搜救系统缩短了时间,提高了被救人员的安全系数.
搜救系统; 无线定位; PDR; 虚拟标定点; 测距
当今社会,火灾已成为世界各国人民所面临的一个共同的灾难性问题,给社会带来了巨大的财产损失并严重威胁人类的生命安全.消防员在救援现场更需要及时救助.2013年元旦,浙江杭州萧山一场无情的大火肆虐了近12 h才被扑灭,杭州消防支队萧山中队3名攻坚组官兵不幸罹难.2013年10月北京市石景山喜隆多商场发生火灾,两名消防员在扑救过程中不幸牺牲.2005年7月西班牙中部地区发生森林大火,整个大火区域线长达17 km,至少有14名消防员在救火行动中不幸遇难[1].2013年6月亚内尔山爆发森林火灾,涉及面积数百万平方米,19名前往林火现场控制火情的消防队员不幸丧生[2].搜救系统的完善对国内和国外火场的救援工作具有重要意义.
搜救系统广泛应用在地震事件、矿井倒塌事件以及雪崩事件等的生命体搜救过程中.地震现场搜救[3]系统是基于ZigBee技术对遇险人员进行定位.它需要在某个地震区域由人工散布节点,这些节点通过自组织方式构成无线网络,以协作的方式感知、采集和处理网络覆盖区域中所需的信息,实现对任意地点信息在任意时间的采集、处理和分析,实现定位功能[4].这种技术的缺点是它的不便性以及不实时性.山体滑坡现场搜救中利用RSSI技术对遇险人员进行搜救[5].救援人员手持的无线设备与被救人员佩戴的无线设备,根据RSSI原理,信号会根据两者之间的距离信息而改变,当信号到达一定强度,代表已找到被救人员.这种搜救方法具有盲目性而且误差比较大.以上两种搜救方法在火灾现场中都不适用.
本文采用基于MEMS技术的行人航迹推算算法(PDR算法)对消防员的位置进行推算,得到虚拟标定点坐标,然后通过接收到的无线测距的数据,利用TOA算法对遇险消防员进行定位,对被救人员的位置展开搜救.消防员遇险现场救援搜救系统采用国际上先进的无线测距系统和微机械加工技术惯性元件.本系统实现了遇险位置定位功能,这是传统意义上的搜救系统无法实现的,从而使消防队员生命安全保障程度大幅提高.
1 PDR定位导航算法
1.1 PDR算法原理
假设行人的初始位置为P0(N0,E0),走动后的下一个位置为P1(N1,E1),行人航迹推算的原理如图1所示.
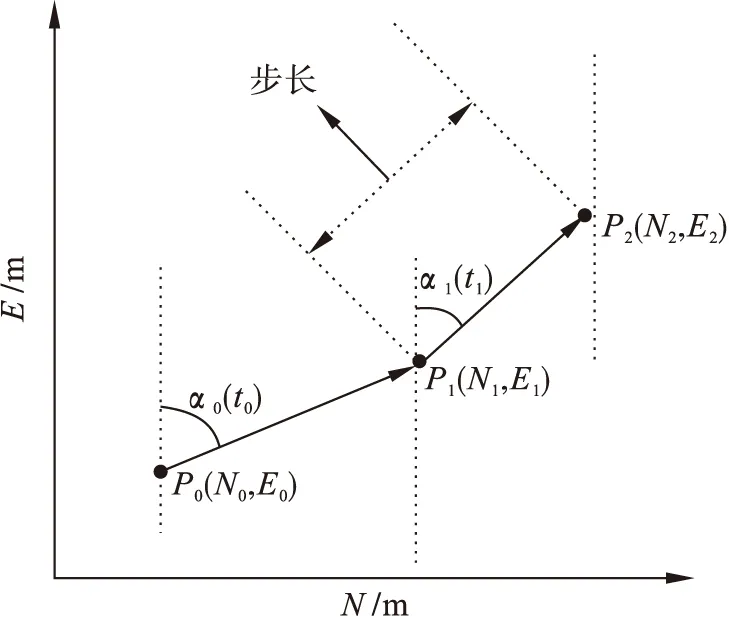
图1 航迹推算原理图
P0到P1的这段时间内步长为S(t0),航向角为α0(t0),则P0(N0,E0)与P1(N1,E1)两点之间的关系表达式为:
(1)
以此类推,Pk点与Pk-1点的关系为:
(2)
行人的步行特点各式各样,在现实情况下,要求对行人导航系统成本要低,其佩戴方法要便利,因此,采用了MEMS器件.通过式(1)与式(2)可知,行走航迹推算算法主要采用的是步数与步长的乘积来获取行人的相对位移,影响该算法定位精度的因素包括起始位置的精度、步长的精度、计步器的精度以及航向角的精度.
1.2 计步器和步长设计
针对人身体不同部位加速度不同的特点,存在着大量的步频探测算法,包括峰值探测法、自相关法、零点交叉法、stancephase探测法、快速傅里叶变换法等[6].现设计基于“滑动窗口+峰值探测”的算法.滑动窗口的重力分量剔除和平滑作用,可以有效地抑制加速度信号的高频噪声,并使因身体抖动造成的多峰值波形平滑成单峰值,便于峰值探测.根据人体机械学原理,当步行者步频处于常规范围时,步幅与步频的关系近似为线性.因此,步长估计选择了线性步长估计模型,实时的步频与步长的模型如下[7]:
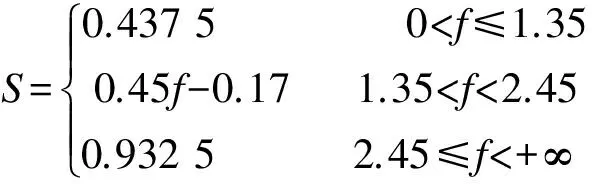
(3)
式中:S为步幅,m;f为步频,Hz.该模型经实验验证,对年龄20~ 32岁、身高160~185cm的东方人具有良好的估算精度,可以满足消防员在火灾现场的定位需求.
1.3 航向角及载体坐标
行人航迹推算PDR算法的关键问题之一是用较低成本从传感器中获得准确的航向,有效地消除陀螺仪的漂移误差和磁罗盘的各种干扰.
通过磁传感器可以获得0°~360°的绝对航向角,便于处理但易受到干扰.为克服外界磁干扰,可将陀螺仪数据进行积分,并结合初始航向角经过角度转化算法获取航向角.数字罗盘可辅助计算前进方向信息,但其长时间的漂移等因素将导致较大的位置误差[8].因此,采用梯度下降法,利用加速度计及磁强计对陀螺仪的误差进行补偿,可减少外界磁干扰,既易于处理,又能在一定程度上校正长时间漂移等带来的较大位置误差.
在已知行人步频和步长的情况下,结合航向(real_heading),可求出载体的横、纵坐标:
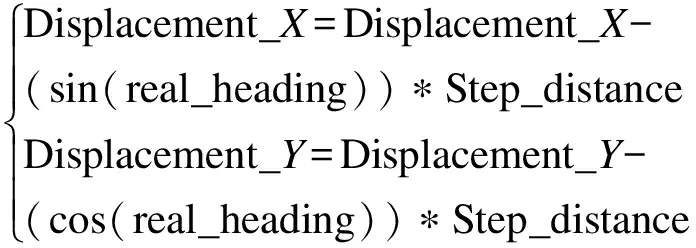
(4)
式中,Displacement_X为载体的横坐标,Displacement_Y为载体的纵坐标,real_heading为载体的航向,Step_distance为载体的步长.
2 无线定位原理与算法
2.1 无线定位测距原理
常用的测距方法为基于信号到达时延TOA的方法、基于信号到达时延差TDOA的方法、基于信号到达角度AOA的方法、基于信号强度RSSI的方法以及基于TWR和SDS-TWR测距的方法等.本文采用基于TOA测距的SDS-TWR测距法(称双向双边测距法),主要作用是降低晶体振荡器频率漂移带来的测距误差,SDS-TWR原理如图2所示[9].

图2 SDS-TWR测距原理图
在数据传输过程中包括2次对称测量.第1次:测量的时间T1是从节点1发出数据包到接收确认包的时间;测量的时间T2是节点2在接收到节点1的数据时开始计时,并在返回应答后停止计时的延时处理时间;数据包往返的时间为T1-T2.第2次:由节点2发送数据包,节点1接收并应答,设节点2、节点1测得的时间分别为T3、T4,则数据包往返时间为T3-T4.
设信号在介质中的传播速度为v,则两节点之间的理论距离d为:
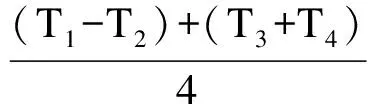
(5)
(6)
T1、T4由节点1的晶体振荡器测得,因此λ1=λ4,T2、T3由节点2的晶体振荡器测得,因此λ2=λ3,则式(6)可化简为:
(7)
从式(7)可看出:SDS-TWR方法消除了晶体振荡器频率漂移所带来的测距误差.
2.2 最小二乘法
在无线传感器网络定位中,主要通过最小二乘法计算得到未知节点的坐标.假设n个锚节点的坐标分别为(x1,y1),(x2,y2),…,(xn,yn),待确定位置节点的坐标是(x,y),该节点到n个参考节点的距离分别是d1,d2,…,dn,根据二维空间距离计算公式,可以获得一个非线性方程组:
(8)
求解此方程组可以得到待定位置节点的坐标(x,y).定位方程采用(8)式,从第一个方程开始分别减去最后一个方程,消去二次项,得线性方程表示为:
AX=B
(9)
其中:

3 系统的实现
3.1 控制方案设计
图3中虚拟定位节点(Anchor)称之为锚节点,其实质就是通过PDR进行位置推算得到的临时点,初始坐标已知,由进行搜救的消防员(以下简称队员A)携带,内配置无线收发模块及采用MEMS技术的惯性导航组件芯片;标签节点(Tag),即被定位目标,由被救消防员(以下简称队员B)携带,内配置无线收发模块.队员A从初始位置M0开始行走,此处的位置坐标和距离信息分别为(0,0),d0.队员A继续行走,到达位置M1,该点的位置坐标和距离信息分别为(x1,y1),d1.以此类推,M2和M3位置的坐标信息和距离信息分别为(x2,y2)、d2,(x3,y3)、d3.当知道4个位置坐标信息以及Anchor节点与Tag节点的距离信息,即可用最小二乘算法计算出此Tag节点的相对位置,这样便可提示队员A及时找到队员B.
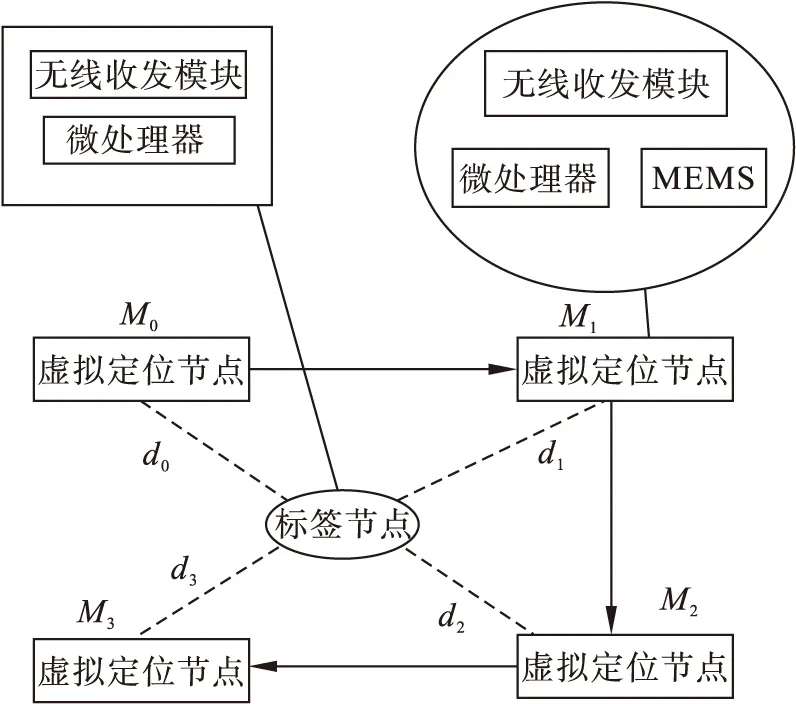
图3 控制方案
3.2 系统测试
X和Y的位置信息通过PDR方法进行推算,测距信息d通过无线测距进行计算,由对应的坐标信息与测距信息可求出未知点的坐标,分别对2个未知点进行测试,具体数据如表1、表2所示.
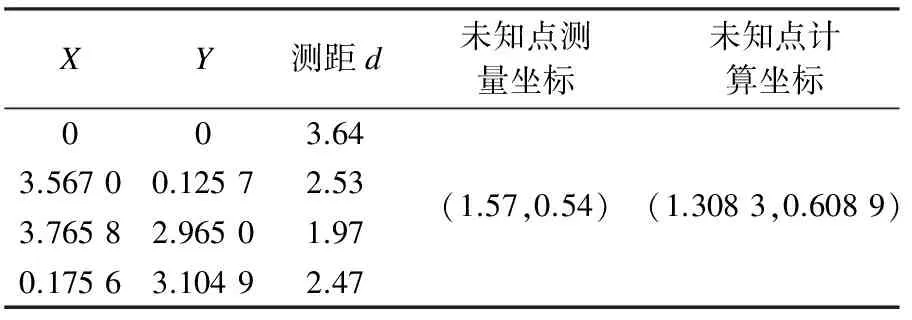
表1 A数据信息

表2 B数据信息
对应表1、表2的直观图如图4、图5. 其中,“■”表示实际的位置坐标,“●”表示试验测得的载体坐标,“×”表示未知点计算的坐标.

图4 表1的直观图
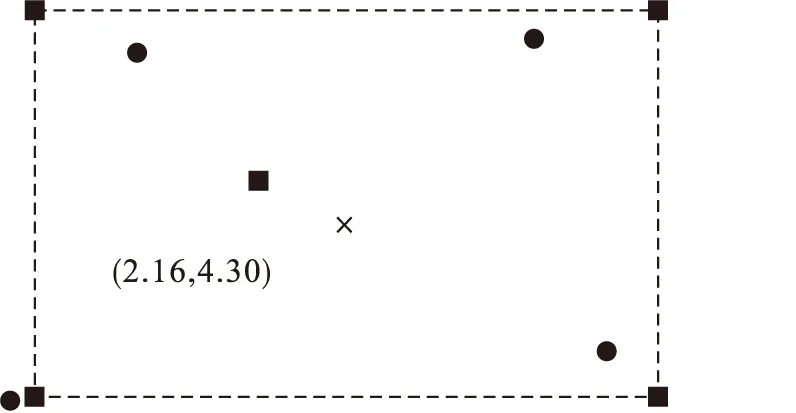
图5 表2的直观图
在相同的初始位置和相同环境的情况下,与RSSI技术寻找被救消防员进行了对比.采取RSSI技术进行搜救时大概在20 min能找到目标.采取无线PDR定位技术搜救时大概5~7 min能确定目标.RSSI技术在寻找信号过程中存在盲目性,在搜救过程中会浪费过多的时间.实验对比证明:该系统更能及时地搜到被救人员,缩短了营救被救人员的时间.
4 结束语
目前搜救系统广泛应用在军事、户外等方面,PDR和无线定位技术的结合进行搜救,是一个新兴的亮点.本设计根据消防员救援环境的特点,应用PDR航迹推算算法得出虚拟坐标点,由无线传感器的测距技术得到距离信息,根据现场需求进行软件设计,实现了对盲区被救消防员的定位系统控制.系统在实验过程中效果良好,但仍需在精度上进行改善和提高.
[1] 李亮.西班牙森林大火14名消防员遇难[EB/OL].(2005-08-15)[2013-10-25].http://www.cqvip.com/Read/Read.aspx?id=20616972
[2] 鹏致.美国亚利桑那山火吞噬十九名消防员[N].广州日报,2013-7-2(A8).
[3] 郭红梅,黄丁发,陈维锋,等.城市地震现场搜救指挥辅助决策系统的设计与开发[J].地震研究,2008,31(1):83-88.
[4] 吴蒋,李壮,张运波.基于ZigBee技术的地震灾区人员搜救系统[J].地球物理学进展,2008,23(4):1336-1339.
[5] 卿晓霞,李文田,王波.山体滑坡监测的RSSI定位改进算法[J].重庆大学学报:自然科学版,2012,35(1):99-104.
[6] 陈伟.基于GPS和自包含传感器的行人室内外无缝定位算法研究[D].合肥:中国科技大学,2010.
[7] 孙作雷,茅旭初,张相芬,等.基于粒子滤波和概率神经网络的步行者定位参数校正[J].上海交通大学学报,2009,43(6):885-889.
[8] 王璐,赵忠,邵玉梅,等.磁罗盘误差分析及补偿[J].传感技术学报,2007,20(2):440-441.
[9] 刘世森,汤朝明,吴畏.无线传感器网络中的 TOA 测距方法研究[J].工矿自动化,2012(3):31-34.
Fire Positioning and Rescue System of Firefighters on Wireless
WANG Qing-hui, LIU Hua-yue, WEI Li-feng
(Shenyang University of Chemical Technology, Shenyang 110142, China)
It is extremely important to rescue the distress firefighters when they are in a critical fire scene.Only rescuing the rescued fireman immediately can protect the safety of personnel when making search and rescue,so we must adopt advanced search and rescue system.It propose a positioning method in this system based on wireless location and PDR autonomous navigation technology.It will calculate the location of rescuees combining the virtual point location information by PDR with distance measuring information by wireless sensor.In this way,we can not only obtain the effective data,but also shorten the time compared with other search and rescue system,and it improves the safety factor of the rescue ersonnel.
search and rescue system; wireless location; PDR; virtual point location; distance measuring
2013-11-11
沈阳市科技攻关项目(F11-009-2-00)
王庆辉(1972-),男,黑龙江齐齐哈尔人,副教授,博士,主要从事无线自组网技术、嵌入式系统等的研究.
2095-2198(2015)03-0268-05
10.3969/j.issn.2095-2198.2015.03.016
TP212.9
A
猜你喜欢
新世纪智能(高一语文)(2021年3期)2021-07-16 08:30:16
科学(2020年3期)2020-01-06 04:02:51
民用飞机设计与研究(2019年4期)2019-05-21 07:21:26
电子制作(2017年7期)2017-06-05 09:36:13
电子制作(2017年24期)2017-02-02 07:14:16
小樱桃·童年阅读(2015年9期)2015-11-26 14:30:45
小樱桃·童年阅读(2015年6期)2015-06-26 14:18:51
小樱桃·童年阅读(2015年5期)2015-06-02 14:39:47
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01 02:53:55
法大研究生(2015年2期)2015-02-27 10:13:55
