
潜艇使用两枚自航式声诱饵对抗鱼雷问题研究*
2015-03-15 00:59:23单广超
舰船电子工程 2015年4期
李 峰 郑 援 单广超
(1.海军潜艇学院 青岛 266042)(2.海军陆战学院 广州 510430)
潜艇使用两枚自航式声诱饵对抗鱼雷问题研究*
李 峰1郑 援1单广超2
(1.海军潜艇学院 青岛 266042)(2.海军陆战学院 广州 510430)
针对潜艇使用单枚声诱饵对抗鱼雷效果不理想,分析了潜艇使用两枚声诱饵对抗鱼雷使用方法。通过潜艇、声诱饵和鱼雷之间的运动关系,建立了潜艇使用两枚声诱饵对抗鱼雷数学模型。利用仿真对比分析了采用单枚声诱饵和两枚声诱饵不同对抗方法,得出了潜艇使用两枚声诱饵对抗鱼雷的有效性。
潜艇; 声诱饵; 鱼雷
Class Number TB556
1 引言
来袭鱼雷依然是潜艇的最大威胁,为此各国海军竞相完善其潜艇的水声对抗系统,以提高其对抗鱼雷的能力。自航式声诱饵是一种欺骗性水声对抗装备,通过模拟潜艇的航行噪声和对主动声探测信号进行应答,对鱼雷进行干扰、迷惑和诱离,从而达到提高潜艇生存概率的目的[1]。然而,由于潜艇机动能力差,使用一枚自航式声诱饵对抗声自导鱼雷的效果有限。为此,本文建立了潜艇使用两枚声诱饵对抗鱼雷的模型,通过仿真分析,为潜艇使用声诱饵对抗鱼雷提供了重要参考依据。
2 自航式声诱饵对抗鱼雷的方法
不管是使用单枚声诱饵还是使用两枚声诱饵对抗鱼雷,声诱饵的使用要考虑发射时机、发射转角、航速和潜艇规避机动等问题。
2.1 声诱饵发射时机的选择
声诱饵的发射时机对声诱饵的对抗效果有较大的影响。发射的时机过早,可能使鱼雷过早穿过鱼雷自导搜索带,使鱼雷发现不了声诱饵;发射较晚,可能使鱼雷在发现诱饵时,已经发现了潜艇,失去了声诱饵诱骗的作用。
2.2 声诱饵发射航向的选择
声诱饵航向的选择应遵循原则[2]:一是保证鱼雷先发现声诱饵;二是鱼雷在跟踪声诱饵过程中和追上声诱饵进行再搜索时,离本艇越远越好。对自航式声诱饵来说,发射后应当尽量拉大鱼雷与潜艇的距离,降低被鱼雷再搜索发现的概率,达到摆脱鱼雷的目的。
2.3 声诱饵发射速度的选择
声诱饵航速通常可以分为高速和低速,高速航行时间一般较短,低速航行时间一般较长。声诱饵航速的选取主要原则是在有效的航行时间内,尽量拉大鱼雷与潜艇的距离[2]。随着现代反潜鱼雷航速越来越高,当潜艇鱼雷报警时,鱼雷与潜艇的距离较近,因此在对抗鱼雷时航速一般选择高速。
2.4 潜艇规避鱼雷航向的选择
潜艇发射单枚自航式声诱饵对抗鱼雷后,采取的战术机动通常是立即转向至声诱饵航向的反航向进行规避,而对于潜艇同时使用两枚声诱饵对抗鱼雷进行规避时,一般转向至两枚声诱饵航向的角平分线的反方向(远离鱼雷的方向)进行规避,同时确保能够将鱼雷置于潜艇声纳可探测范围内。
3 模型建立
依据潜艇使用自航式声诱饵对抗鱼雷的过程,应建立以下模型。
3.1 水声环境模型
本文主要考虑声传播损失模型和海洋环境噪声模型。
3.1.1 声传播损失模型
声传播损失模型[3]主要考虑扩展损失和吸收损失进行计算,其公式如下:
(1)
其中,r为声源到声纳的距离,单位为m;a为吸收系数,单位为dB/km,其值与声纳信号频率有关,对于特定的声纳信号为固定值。
3.1.2 海洋环境噪声模型
海洋环境噪声级通常由实测数据确定,仿真时可借助某些经验模型进行测算。对于浅海,采用如下计算噪声谱级的公式[4]
NL=10lgf-1.7+6S+55
(2)
式中,f为频率(kHz),S为海况等级(S=0,1,2,…,9)。
3.2 对抗实体的声学特性模型
3.2.1 潜艇目标强度
潜艇目标强度描述的是整个潜艇对声波的反射能力[5]。目标反射强度与目标的几何形状密切相关,对于舰艇目标来说,目标反射强度还随声波入射角变化而变化,呈“蝴蝶形”分布[6]。
目标反射强度可以采用蝴蝶形分布曲线近似表示:
TS(a)=TS0(16.17-2.98cos2a-3.083cos6a)/22.233
(3)
式中,a为声波入射舷角,TS0为目标正横反射强度,一般取为20dB~25dB。
3.2.2 潜艇辐射噪声
计算潜艇辐射噪声强度的经验公式[4]为
SL=60lgV+9lgT-20lgfz+35.8
(4)
式中,SL为潜艇辐射噪声谱级(dB);V为潜艇航速(kn);T为潜艇吨位(t);fz为噪声频率(kHz)。
3.2.3 鱼雷自噪声
鱼雷自噪声的产生机理与辐射噪声相似,主要与鱼雷的动力类型、航速、航行深度以及系统结构等有关,但航速、航深对其影响最大,鱼雷自噪声在鱼雷声探测中表现为噪声级NL项。
在鱼雷接收频段内的鱼雷自噪声经验公式为[4]
NLz= -14+96lgV-33lgfy
+20lg(5.1/T1.175)+10lgΔf
(5)
式中,V为鱼雷速度(kn);fy为鱼雷自导接收工作频率(kHz);Δf为带宽(kHz);T为鱼雷航行深度(m)。
3.3 对抗实体机动模型
3.3.1 潜艇机动模型
潜艇的机动模型主要包括直线运动模型、旋回运动模型和变速模型,机动模型如下:
1) 潜艇直线运动坐标模型
潜艇在直线运动过程中任意位置的坐标为
(6)
式中,x(t)、y(t)、z(t)分别代表t时刻潜艇的位置坐标;h(t)代表潜艇的航向;v(t)代表潜艇航速;dt代表仿真时间步长;θ代表潜艇纵倾角。
2) 潜艇转向坐标模型
潜艇转向过程中任意位置的坐标为
(7)
式中,R代表潜艇旋回半径,v代表潜艇航速(kn),旋回半径公式:R=10·v+150(m);ω代表潜艇旋回角速度,h(t)为潜艇转向时航向,hq0为潜艇转向前航向,h(t)=hq0+ω·t。
3) 潜艇变速模型
设t时刻潜艇开始变速,则在t+ndt时刻,潜艇航速[7]为
(8)
式中,Kv=1为潜艇加速,Kv=-1时为潜艇降速;C为潜艇机动系数,C越小,则潜艇的机动性能越好;V0为开始变速时的航速,即V0=V(t);V为变速后的航速。
计算出变速过程中每一时间点的航速值后,代入式(1),可递推求得潜艇在变速过程中的位置坐标。
3.3.2 鱼雷机动模型
在没有发现目标时,鱼雷按蛇行搜索弹道进行搜索机动,如果始终未发现目标,则鱼雷航行至航程耗尽为止。
发现目标后,鱼雷对潜艇进行跟踪,直至命中目标。若鱼雷尾追丢失目标,鱼雷就会进入环形再搜索弹道。
鱼雷进入环形再搜索弹道后,若能发现目标,鱼雷就进入尾追弹道;若不能发现目标,鱼雷以环形搜索弹道航行至航程耗尽为止[8]。
3.3.3 声诱饵对抗模型
1) 声诱饵主动对抗模型
声诱饵是通过应答主动脉冲信号来模拟目标的反射特性的。当下面不等式成立时,鱼雷发现声诱饵[9]:
SL-2TL(Dd)+TSd≥NL-DI+DT
(9)
式中,SL为鱼雷自导发射声源级;Dd为声诱饵到鱼雷的距离;TSd为声诱饵模拟的目标强度。
2) 声诱饵被动对抗模型
当下面不等式成立时,鱼雷发现声诱饵[6]:
SLd-TL(Dd)≥NL-DI+DT
(10)
式中,SLd为声诱饵辐射噪声级;Dd为声诱饵到自导鱼雷的距离。
4 仿真流程
当鱼雷进入潜艇报警距离内时,发出鱼雷报警信息,分析报警信息,制定出对抗方案,然后对鱼雷实施对抗,潜艇进行规避[10]。当自航式声诱饵发射后,鱼雷将对跟踪目标进行识别,如果判断其目标是假目标,则进入再搜索阶段。只有当鱼雷航程耗尽或者鱼雷与潜艇之间的距离达到一定的范围而判定鱼雷击中目标时,仿真程序才可以结束。
通过仿真统计潜艇成功规避鱼雷攻击的次数k,k与仿真次数N的比值即为潜艇成功规避鱼雷的概率。本文取每种态势下仿真次数1000次(即N=1000),记录潜艇对抗成功次数k,从而得到潜艇成功规避鱼雷的概率,具体流程如图1所示。
图1 仿真流程图
5 仿真结果分析
假设海况3级,鱼雷航速45kn,最大航程为50km,鱼雷自导作用距离为1200m,鱼雷识别目标距离为800m,鱼雷报警距离为30Cab,报警舷角分别为0°、30°、60°,潜艇航向90°,初始航速6kn,最大速度为20kn,潜艇规避航向固定,以声诱饵发射转角为变量进行仿真。假设潜艇鱼雷报警时鱼雷剩余航程为30km,仿真中实时计算鱼雷航程,当鱼雷达到其最大航程时,仿真结束,记潜艇规避成功一次。通过仿真对比潜艇采用单枚声诱饵(如图2)和两枚声诱饵(如图3)不同对抗方案时,潜艇成功规避概率,从而检验不同对抗方法的对抗效果,仿真结果如表1所示。
表1 潜艇使用不同对抗方案的仿真结果
图2 潜艇使用单枚声诱饵对抗鱼雷示意图
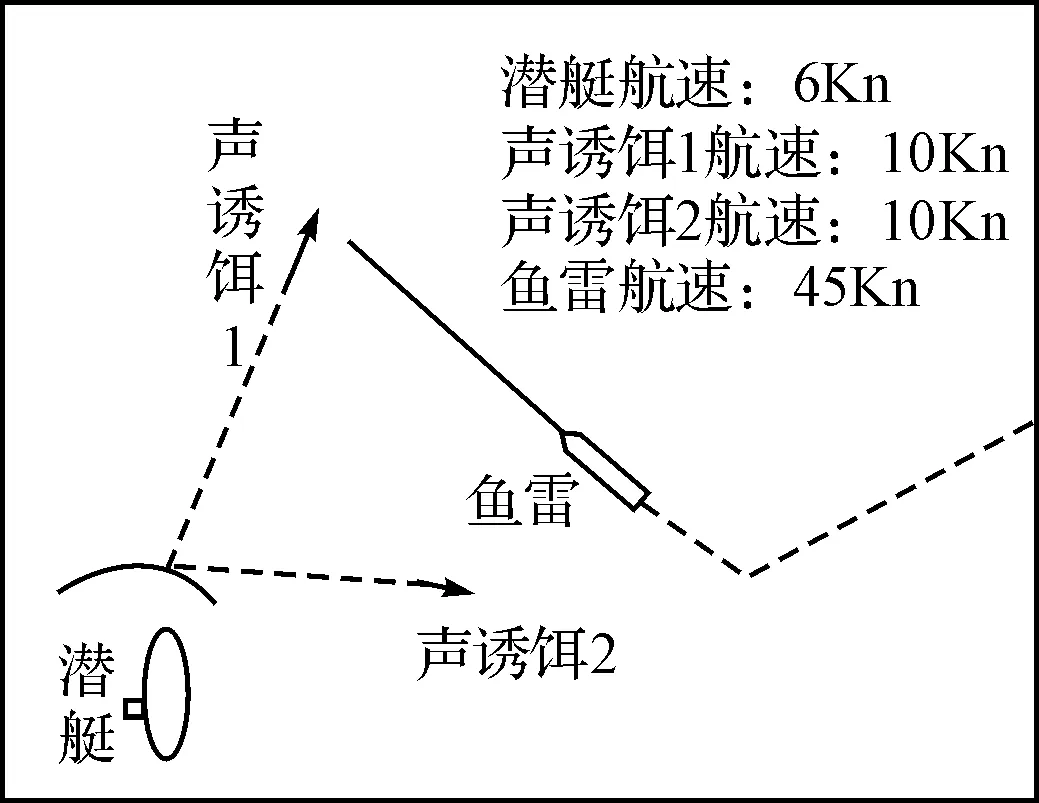
图3 潜艇使用两枚声诱饵对抗鱼雷示意图
通过分析表1的仿真数据,可以看出潜艇在摆脱鱼雷攻击过程中,当潜艇规避航向一定的情况下,相比潜艇使用单枚声诱饵的对抗方案,采用两枚声诱饵对抗鱼雷的方案成功规避鱼雷的概率高于前者,在一定程度上有效提高了潜艇生存概率。
6 结语
本文建立了潜艇、自航式声诱饵和鱼雷的数学模型,利用仿真对比分析潜艇使用单枚声诱饵和两枚声诱饵不同对抗方案情况下潜艇的生存概率,从而验证了潜艇使用两枚声诱饵对抗鱼雷的有效性,为潜艇使用自航式声诱饵防御来袭鱼雷提供了新的思路。
[1] 夏佩伦,李本昌.潜用自航式声诱饵发展有关问题探讨[J].火力与指挥控制,2012,37(3):1-3.
[2] 孟庆玉,张静远,宋保维.鱼雷作战效能分析[M].北京:国防工业出版社,2003:225-228.
[3] A.D. Waite.实用声纳技术[M].北京:电子工业出版社,2005:44-45.
[4] 刘孟庵,连立民.水声工程[M].杭州:浙江科学技术出版社,2002:72-73.
[5] 宋志杰,史秋亮,韩梅,等.潜艇水声对抗原理与应用[M].北京:兵器工业出版社,2002:64.
[6] 陆铭华.舰艇作战模拟理论与方法[M].北京:海洋出版社,2000:97.
[7] 陈建华.舰艇作战模拟理论与实践[M].国防工业出版社,2002:166.
[8] 陈军,黄建国,潘小京.自航式声诱饵对抗声自导鱼雷有关问题研究[J].电声基础,2008,32(8):41-44.
[9] 陈春玉,张静远,王明洲,等.反鱼雷技术[M].北京:国防工业出版社,2006:43-44.
[10] 汪伟,李本昌,罗迪.潜艇水声对抗及水声对抗器材的应用[J].指挥控制与仿真,2008,30(5):102-104.
Usage of Double Acoustic Decoys in Defending Torpedo by Submarine
LI Feng1ZHENG Yuan1SHAN Guangchao2
(1. Navy Submarine Academy, Qingdao 266042)(2. Navy Marine Academy, Guangzhou 510430)
To solve the problem that using single mobile acoustic decoy to counter torpedo is not so efficient by submarine, this article analyses the method of using double mobile acoustic decoys to counter torpedo. The mathematical model of double mobile acoustic decoys against torpedo, based on the relationship of movement geometry among the submarine, acoustic decoy and torpedo, is established in the process. The result of simulation shows that the presented method is more efficient by comparing and analyzing various against method.
submarine, acoustic decoy, torpedo
2014年10月15日,
2014年11月30日
李峰,男,硕士研究生,研究方向:兵种战术学。
TB556
10.3969/j.issn1672-9730.2015.04.040
猜你喜欢
小学生学习指导(小军迷联盟)(2023年3期)2023-03-27 09:22:30
舰船科学技术(2022年22期)2022-12-13 03:37:24
水上消防(2022年1期)2022-06-16 08:06:56
科普童话·神秘大侦探(2022年4期)2022-05-26 19:57:56
作文小学高年级(2022年2期)2022-03-03 08:54:32
小哥白尼(军事科学)(2021年8期)2021-11-22 07:58:22
小哥白尼(军事科学)(2020年8期)2020-05-22 06:28:02
舰船科学技术(2018年7期)2018-07-25 06:30:18
现代防御技术(2016年1期)2016-06-01 12:13:27
舰船科学技术(2016年1期)2016-02-27 15:39:23
