
SMA 丝驱动的仿生水母伞体推进器设计
2015-03-12 09:23袁岳胜桑学夫赵晓明
微特电机 2015年8期
李 健,袁岳胜,桑学夫,赵晓明
(东北林业大学,哈尔滨150040)
0 引 言
21 世纪人类越来越重视探索海洋世界,水下机器人作为一种有力的工具得到了广泛的应用。商业应用中,水下机器人能完成石油和天然气行业的海底测绘。水下机器人也广泛用于开展各种军事任务,如探测水下矿山、潜艇的探测和监测。其他用途还包括海底动物的迁移、检测化学药剂。受到大自然的启发,科学研究者根据海洋生物的形态特征和运动方式研制出仿生鱼[1]、仿生虾[2]、仿生海龟[3]等各种仿生水下机器人,以满足各种需求。目前研究较多的电机驱动式水下推进方式具有噪声大、驱动机构复杂和灵活性低的缺点。如果能利用智能材料为驱动源就可以避免这些缺点。智能材料使得仿生水下机器人研究有了新突破,也成为了仿生机器人领域的研究热点。
水母是水生环境中重要的浮游生物,属于刺丝胞动物。水母在运动时,其外伞伞体首先收缩,其结果会导致内腔体积的减小,进而将腔内的水喷出,在喷出水的反推力作用下带动水母进行移动。水母身体具有很强的柔性,推进频率低,噪声小。而且还可以持续的保持低能耗,高效率。如果能将水母的这种游动性能应用到仿生水下机器人,那将极大地提升水下机器人的性能。由此,研究水母自主游动的推进器有巨大的价值。国内外利用智能材料研制了各种各样的仿生水下机器人,但对仿生水母机器人的研究成果比较有限,总得来讲,可以分为两大类:触手推进式仿生水母机器人和喷水推进式仿生水母机器人。在触手推进式仿生水母机器人方面,国内哈尔滨工程大学研制了两种不同结构的仿生机器水母[4-5],一种是将SMA 丝缠绕在水母伞体周向上产生收缩作用,另外一种是利用SMA 丝直接对伞体内部的摆臂产生拉动动作,两种机器水母的末端都附上了IPMC 驱动的触手,具备一定的推进能力。德国费斯通公司研制的仿生机器水母由密封舱及8 根触手推进器构成[6],该触手推进器由电机驱动,可实现往复的弯曲动作,产生的推进力推动机器水母前进。韩国智能系统设计与控制实验室利用IPMC致动器为驱动材料,并模仿海月水母的形态研制仿生水母的伞体结构[7]。在喷水推进式仿生水母机器人方面,维吉尼亚理工学院在仿生水母机器人研究方面做了大量工作,无论是形态还是动作特征已经非常接近活体水母。分别研制了IPMC 驱动的仿生水母机器人[8],采用8 个驱动单元时速度可达1.5 mm/s,功率为1. 14 W;SMA 驱动的Robojelly[9],重量为242 g,直径为164 mm,平均功率17 W左右;利用化学燃料作为能量来源对嵌入的SMA 致动器进行驱动[10],也取得了良好的实验效果。这些喷水推进式的仿生水母机器人都没能将控制电路和电源集成,形成自主游动。除此之外,本课题组在利用SMA 丝驱动的仿生水下机器人方面做了大量的研究工作[11-12]。
本文在总结国内外相关技术发展现状的基础上,首先分析了水母的肌肉结构及游动机制,其次在对水母伞体进行改造的基础上,设计应用SMA 丝作为驱动器的柔性驱动单元。并设计了内嵌6 个驱动单元的仿生伞体推进器,对该推进器进行了推进力理论分析及CFD 外形仿真。最后研制了仿生伞体推进器样机。
1 水母肌肉结构和推进机制的研究
水母属于无脊椎动物,其身体结构示意图如图1 所示,水母的运动主要由外伞完成,伞体内部有多种肌肉组织,通过肌肉组织的收缩带动伞体收缩,使内伞腔体体积减小,腔体内部的水被排出,完成喷水动作,水母通过水流的反作用力向前运动,之后,水母伞体内部的肌肉组织在收缩过程中产生的弹性势能逐渐释放,使伞体缓慢恢复到最初的状态,内伞腔体体积增大,水重新流入腔体内部,完成吸水动作,随后伞体内部肌肉组织收缩,进行下一次喷水动作。水母通过连续的喷水动作和吸水动作向前运动。

图1 水母身体结构示意图
水母的身体呈铃形或倒置的碗形,或伞形,向外凸出的一面称外伞面(exumbrella)或上伞面,凹入的一面称下伞面(subumbrella),下伞面的中央有一下垂的管称垂唇(manubrium),垂唇的游离端为口,伞的边缘有一圈触手,水母下伞的边缘向内伸出一圈窄的膜状结构,称为缘膜(velum)。一般的水螅水母伞体组织如图2 所示,伞体主要由中胶层和非肌肉上皮组织构成,环形肌肉附着在中胶层内侧,位于非肌肉上皮组织和中胶层中央,从水母的顶端到末端都有分布,是水母进行运动的最主要的肌肉组织,起到控制内腔收缩的作用。当环状肌收缩时,带动整个伞体内腔收缩,产生喷水作用。并且在伞体收缩的过程中,一部分能量会存储到中胶层和非肌肉上皮组织中,为伞体的扩展回复提供动力。软腭状圆形肌肉位于水母伞体边缘,由非肌肉上皮组织包裹着,起到辅助环形肌肉完成水母喷水运动的作用,内外神经环起到控制肌肉收缩的作用[13]。

图2 水母伞体组织示意图
水母内部肌肉组织属于肌肉性静水骨骼,肌肉性静水骨骼是一种缺乏典型体系的类似骨骼的肌肉,人的舌头、大象的鼻子都属于肌肉性静水骨骼。肌肉性静水骨骼与普通的肌肉不同的是它并不附着在骨骼上,没有骨骼支撑但能完成多种复杂的运动,伸缩效果明显,并且可以变硬用于支撑,这种特殊的肌肉结构也是水母、乌贼等无脊椎动物运动不可缺少的条件。
仿生水母所采用的设计方法主要是模仿水母的身体结构和运动中肌肉的运动形式。当水母需要运动时,由内神经环和外神经环给软腭状圆形肌肉组织和环形肌肉输入肌肉收缩的信号,软腭圆形肌肉组织和环形肌肉属于肌肉性静水骨骼,收缩效果非常明显,能达到完全扩展长度的40%,环形肌肉在水母伞体内部,肌肉的收缩带动伞体的收缩,使腔体内部的水由伞体下部喷出,同时在软腭状环形肌肉组织的收缩下使伞体喷射出的水达到更高的速度。水母体内的肌肉组织和神经比较复杂,所以仿生水母的制作只是模仿环形肌肉组织的运动,省略了软腭状圆形肌肉组织的运动,同样能达到仿生水母运动的模仿的效果。由于SMA 丝通电收缩效果仅为4%[12],不能直接用于模仿水母环形肌肉结构,故将SMA 丝贴在弹性片的一侧,通过SMA 丝的收缩带动弹性片弯曲,达到运动放大作用,实现对水母环形肌肉结构的模仿。硅胶浇灌的伞体用于代替水母的中胶层和上皮组织,包裹贴有SMA 丝的弹性片并形成腔体。弹性片在SMA 丝的拉力下弯曲带动硅胶伞体运动完成对水母运动的模仿。
2 驱动伞体的柔性驱动单元
通过现有的材料及驱动器完全照搬水母伞体结构十分困难,因此将实际伞体整体的动作简化为其中均匀分布的多个驱动单元。伞体的剖面动作呈现柔性弯曲,因此柔性驱动单元的动作能够模仿实现这种动作。同时在驱动单元的表面附上柔软的模仿伞体形状的硅胶膜,称之为被动伞体,这样多个可自由伸缩的驱动单元可带着被动伞体自由收张以增大喷水推进性能。
2.1 结构设计
驱动单元是将SMA 丝内嵌式到整体结构之中,还包括了弹性体、支撑体、蒙皮和导线等几个构成零部件,如图3 所示。弹性体一般由绝缘的塑料薄片制成,一般厚度为0.3 mm 左右,支撑体可以由万用板获得,蒙皮可以是乳胶的薄膜,也可以通过一些流动性好的硅橡胶材料实现。其制作的工艺过程:首先将SMA 丝紧紧贴附与弹性体之上,考虑到给SMA丝供电的方便性以及增强动作效果,将SMA 丝折成“U”型。“U”型丝材的底端通过穿过金属薄片后,将金属薄片粘贴在弹性体一端的方式固定。“U”型丝材的开口端则固定于支撑体上,支撑体同样与弹性体的另一端通过粘贴的方式固定。通过支撑体还可以引出2 根导线,以便给SMA 丝通电加热。在粘贴的过程中,应使SMA 丝紧紧地贴附于弹性体表面上,且状态平直,以带来好的动作效果。最后将蒙皮包覆于整体动作单元的外面,起到对SMA 丝绝缘的作用,同时还能增强驱动单元的弹性。
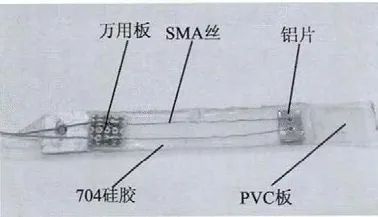
图3 驱动单元
偏心布置到驱动单元之中的SMA 丝是经过预拉伸的。其通断电过程中的动作原理:当需要驱动单元产生弯曲动作时,首先给SMA 丝通电加热,当SMA 丝达到相变温度后,其晶相组织发生奥氏体相变,宏观上SMA 丝会产生收缩作用,在SMA 丝收缩中本身应力的带动下,整体的驱动单元会产生弯曲响应。当驱动单元的弯曲角度达到一定范围之后,给SMA 丝断电,SMA 丝会逐步冷却,其冷却过程在水中会更加迅速,伴随着SMA 丝的冷却,其晶相组织又会发生马氏体相变,在收缩过程中存储于弹性体和蒙皮里的弹性能的作用下,驱动单元会回复到初始状态,进而完成了整个动作循环。
2.2 驱动单元的理论计算
仿生水母推进器中的驱动单元采用丝径为0.2 mm 的镍钛基SMA 丝,其在无应力状态下的相变温度依次为:Mf=43.4℃,Ms=52.2℃,As=51.4℃,Af=58.8℃。SMA 丝最大的应力可达到800 MPa,足以克服弹性体的弯曲应力。建立一个简单的SMA驱动单元的几何模型,如图4 所示,认为SMA 驱动单元在弯曲时保持圆弧状态,当弯曲到最大角度时,SMA 丝的收缩量为δ。
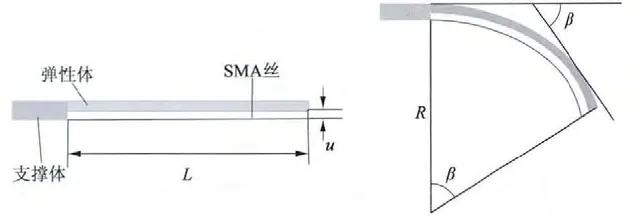
图4 几何模型
则可以建立如下关系式:

式中:R 为驱动单元的弯曲半径;u 为SMA 丝中心与弹性片型心的距离;β 为驱动单元的弯曲角度;L为弹性片的长度。
由式(1)、式(2)可以得出:

由此可见,驱动单元的弯曲角度正比于弹性体的长度,反比于SMA 丝中心与弹性片型心的距离。初步设计参数:弹性片的长度L =50 mm,u =0. 3 mm。当SMA 丝的应变为2%时,单侧最大弯曲角度β 可达到95°。
2.3 驱动单元动作实验
在室温下,驱动单元置于水中,温度保持22 ℃,给SMA 丝通电,为了提高频率,把握好散热时间。图5 为通电电压11. 2 V、脉宽为5 0 0 ms、脉间为1 000 ms 时驱动单元为最大弯曲角度。结论:(1)结构简单、紧凑;(2)动作无噪声,动作幅度大;(3)模块化程度高,可多个合并一起作为水下机器人推进器。因此,基于该驱动单元具备研制出仿生化程度高的仿生水母推进器的可行性。
3 水母伞体设计
3.1 结构设计及推进力计算
设计放生水母时将驱动单元镶嵌在水母伞体内,通过驱动单元的运动,带动水母伞体一起运动。水母伞体推进结构由头舱、驱动单元、硅胶伞体和舱体四部分组成,结构如图6 所示。头舱为一类球形结构,它与舱体连接,作用是降低仿生水母在游动时所受的阻力;头舱与舱体里边装置电路电池及其控制部分。舱体外环配合一支撑架,在支撑架上固定六个驱动单元;驱动单元内嵌在硅胶伞体中。
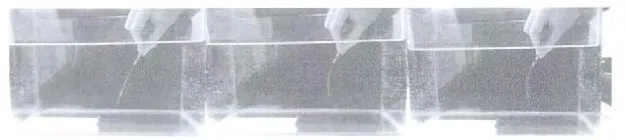
图5 驱动单元实验图
为了建立仿生水母推进力的数学模型,进行如下的简化:(1)仿生水母的伞体为半球型;(2)仿生水母的弹性单元弯曲的圆心在中心轴线上;(3)六个弹性单元均匀分布且伞体面质量分布均匀;(4)仿生水母的头部舱体在运动时的阻力和伞体舒张时的阻力忽略不计。
基于上述简化,仿生水母可建立如图7 所示的模型。
图7 中,L 为弹性单元长度,V1为初始状态的体积,V2为任意状态的体积,β 为弹性单元弯曲角度。

得:

根据排出水的体积计算一次喷水所产生的推进力,由动能方程:

冲量方程

式中:t 为通电一次伞体收缩的时间;v 为仿生水母碰水后获得的速度;m 为仿生水母的质量。得:

由此可见,水母推进速度取决于驱动单元长度、通电时间、自重。当驱动单元越长,通电时间越长,重量越轻,水母推进的速度就越快。但是驱动单元通电时间不宜过久,SMA 记忆合金丝温度过高,容易熔化硅胶。通电时间在0.1 ~2 s。驱动单元的长度也不宜过长,SMA 丝的长度越长,丝的收缩率越小,弯曲效果会显著下降。一般长度在50 ~70 mm效果最好。
3.2 CFD 模型仿真
仿生水母机器人的最大游速还取决于其外形的减阻特点,因此为了研究游动中仿生水母机器人所受到的阻力情况,在建立仿生水母推进器三维模型的基础上,应用计算流体动力学的手段对其进行数值模拟分析。所建立模型的尺寸:总长为145 mm,直径为130 mm。仿真在FLUENT 软件中进行,将仿生水母推进器模型置于流场中,流场长度为模型的3 倍。仿生水母器人的游动速度可以通过固定模型,施加背景流的方式代替,该模型受到的流体的冲力作用可认为是外形阻力。在边界条件的设置方面,设置进口为速度入口,出口为压力出口,背景流速为0.1m/s,仿真类似于将模型固定于一定流速的水洞中进行流场显示实验。
在FLUENT 中求解流体的控制方程,采用一阶分离式隐式非稳态求解方案,根据速度入口条件和三维模型的尺寸,其雷诺数在5 000 左右,处于层流和湍流的过渡区域,计算模型采用层流粘性模型。周围流场为水,其密度 为998.2 kg/m3,运动粘度为1.0 ×10-6m2/s。仿真后得到的仿生水母推进器在游动中形体上的压力分布如图8 所示,从图8 中可以看出,该模型压力分布比较均匀,头部处所受压力比较集中,因此在今后的改进设计中可以设计流线型更好的结构。
3.3 模具设计及样机制作
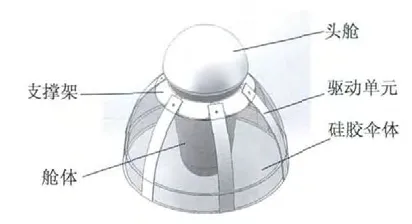
图6 三维结构
图7 几何模型
图8 仿生水母机器人游动中的静压分布图
伞体剖面线呈现弯曲状态,SMA 丝将平顺地镶嵌到伞体内部,将决定伞体的动作效果。硅胶伞体由模具铸成,模具由上模和下模组成,如图9 所示。其中上模分为1、2、3 三部分,上模1 为无底透明碗状,四周有一注模孔;2 为薄壁圆柱状,与1 紧密配合;3 为圆台状,支撑水母舱体。下模分为A、B 两部分,下模A 为环状,承接上模2;下模B 为圆柱底座,承接下模A,且圆周开有方槽,槽底有螺纹孔,下模B 底面同样开有通孔,注模时方槽螺纹孔用于固定弹性体,底面通孔用于固定上模3。注模时将整体模具与水母主体固定连接,通过注模孔将硅胶注入上模1 与3 之间的空隙中,硅胶膜将弹性体与蒙皮完全包住,带硅胶完全凝固后脱模,则水母伞体制作完成。浇灌出的实物如图9 所示,该仿生水母推进器总重425 g,长144 mm,外径130 mm。

图9 模具
图10 实物
4 结 语
本文根据水母肌肉结构仿生设计出水母伞体喷水式推进器,利用SMA 丝作为驱动源,制作驱动单元。将6 个驱动单元均布镶嵌在硅胶伞体里,用驱动单元带动硅胶伞体实现喷水推进。建立了水母推进力及推进速度的数学模型,并对仿生水母机器人的外形进行了仿真。设计出硅胶伞体模型和浇灌模具,制作出放生水母推进器样机。
[1] HU H,LIU J,DUKES I,et al.Design of 3D swim patterns for autonomous robotic fish[C]//International Conference on Intelligent Robots and Systems. Beijing:Proceedings of the IEEE/RSJ,2006:2406 -2411.
[2] AYERS J,WITTING J,WILBUR C. Biomimetic robots for shallow water mine countermeasures[C]//Autonomous Vehicles in Mine Countermeasures Symposium,Monterey,USA,2000:1 -16.
[3] LICHT S,POLIDORO V,FLORES M.Design and projected performance of a flapping foil AUV[J].IEEE Journal of Oceanic Engineering,2004,29(3):786 -794.
[4] GUO S X,SHI L W,YE X F,et al.A new jellyfish type of underwater microrobot[C]//Proceedings of the IEEE,International Conference on Mechatronics and Automation,Harbin,2007:509 -514.
[5] YANG Y C,YE X F,GUO S X. A new type of jellyfish -lLike microrobot[C]//Proceedings of the IEEE International Conference on Integration Technology,Shenzhen,2007:509 -514.
[6] AquaJelly[EB/OL]. http://www. festo. com/cms/en_corp/9772.htm.
[7] Polymer actuator[EB/OL]. http://altair. chonnam. ac. kr/%7Eikoh/new%20home/pa.html.
[8] NAJEM J,SARLES S A,AKLE B,et al. Biomimetic jellyfish -inspired underwater vehicle actuated by ionic polymer metal composite actuators[J]. Smart Materials and Structures,2012,21 (9):094026.
[9] VILLANUEVA A,SMITH C,et al. A biomimetic robotic jellyfish(Robojelly)actuated by shape memory alloy composite actuators[J].Bioinspiration & Biomimetics,2011,6(3):036004.
[10] TADESSE Y,VILLANUEVA A,HAINES C,et al.Hydrogen -fuel -powered bell segments of biomimetic jellyfish[J]. Smart Materials and Structures,2012,21(4):045013.
[11] 李健,郭艳玲,王振龙.SMA 丝驱动的仿生尾鳍推进器的实验研究[J].微特电机,2013,41(7):10 -14.
[12] 李健,郭艳玲,王振龙.SMA 丝驱动的触手推进式仿生机器水母研究[J].哈尔滨工业大学学报,2014,46(1):682 -688.
[13] SATTERLIE R A. Neuronal control of swimming in jellyfish:a comparative story[J]. Canadian Journal of Zoology,2002,80(10):1654 -1669.
猜你喜欢
舰船科学技术(2021年12期)2021-03-29
肉类研究(2020年9期)2020-12-14
动漫星空(兴趣百科)(2020年12期)2020-12-12
儿童故事画报(2020年8期)2020-10-30
科技资讯(2020年3期)2020-04-07
当代陕西(2018年12期)2018-08-04
肉类研究(2017年8期)2017-11-16
创新作文(小学版)(2017年13期)2017-11-09
创新作文(小学版)(2017年23期)2017-04-04
学习月刊(2015年10期)2015-07-09
