
模糊滑模控制在双容水箱中的应用研究
2015-03-11 09:03:38ResearchontheApplicationofFuzzySlidingModeControlinDualWaterTank
自动化仪表 2015年1期
Research on the Application of Fuzzy Sliding Mode Control in Dual Water Tank
王 凯 张根宝
(陕西科技大学电气与信息工程学院,陕西 西安 710021)
模糊滑模控制在双容水箱中的应用研究
Research on the Application of Fuzzy Sliding Mode Control in Dual Water Tank
王凯张根宝
(陕西科技大学电气与信息工程学院,陕西 西安710021)
摘要:针对常规控制在一些复杂液位控制系统中不能取得较理想控制效果的问题,提出了一种将模糊控制与滑模变结构控制相结合的模糊滑模控制方法。采用Matlab/Simulink设计了模糊滑模控制器,并将该控制器应用于典型二阶控制对象双容水箱系统进行仿真分析,以验证该控制方法的性能。仿真结果表明,该控制方法在保证系统动态、稳态性能的同时,削弱了抖振,使系统更快速地趋于稳定,提升了系统的动态性能及实用性。与常规控制相比,模糊滑模控制具有较好的自适应性和鲁棒性,适用于复杂液位控制系统。
第一作者王凯 (1988-), 男, 现为陕西科技大学控制理论与控制工程专业在读硕士研究生;主要从事智能控制方向的研究。
关键词:模糊滑模控制器抖振双容水箱Simulink自适应性鲁棒性
Abstract:In conventional control, ideal control effect cannot be achieved for complex liquid level control system, thus the fuzzy sliding mode control method which combines fuzzy control and sliding mode variable structure control is proposed. By adopting Matlab/Simulink, the fuzzy sliding mode controller is designed, and the controller is applied for typical second order controlled object, i.e., the dual water tank system for simulation analysis to verify the performance of this control method. The results of simulation show that this control method ensures dynamic and static performance of the system, and weakens the chattering, thus to make the system more quickly stabilized, the dynamic performance and practicability of the system are improved. Comparing with conventional control, the fuzzy sliding mode control possesses better adaptability and robustness; it is more suitable for complex level control systems.
Keywords:Fuzzy sliding mode controllerChatteringDual water tankSimulinkAdaptabilityRobustness
0引言
滑模控制(sliding mode control, SMC)也叫变结构控制(variable structure control, VSC),由前苏联学者Utkin和Emelyanov于20世纪50年代末提出。SMC是一种特殊的非线性控制,其优点与特殊性在于控制对象的结构不固定。滑模控制是在动态过程中,根据系统当前状态,使系统首先达到设定的切换面,然后在预定的滑动模态轨迹运动,从而使被控系统渐进地达到目标状态,实现系统稳态控制[1]。由于滑模控制与被控对象的参数及扰动无关,因此其还具有鲁棒性强、无需辨识、响应快速、物理实现简单等优点。但由于本质上的不连续开关特性及系统惯性,滑模控制也会导致系统抖振,使稳态性能有所下降,为此,利用模糊控制对切换函数模糊化,在滑模控制的基础上引进模糊控制构成模糊滑模控制器,从而消减抖振,使被控对象有较强的鲁棒性和抗干扰性。相比工业上传统的控制器,滑膜控制可达到更好的控制效果。因此,滑模变结构广泛应用在航天器、机器人、电力系统和伺服系统中[2]。
本文所应用的被控对象是一个双容水箱。双容水箱是一种复杂的非线性时滞系统,采用传统的PID控制效果很不理想,这里采用模糊滑模变结构的思想设计控制系统,可使系统运行得到较好的稳定性。
1模糊滑模变结构控制设计
设有被控对象表达式为:
(1)
已知系统存在误差为:
(2)
切换项函数表达式为:
(3)

(4)
则得到等效控制:
(5)
(6)
设计等效滑模控制器控制率为:
u=ueq+usw
(7)

(8)
(9)

等效滑模控制率包含切换控制项usw与等效控制项ueq,u=ueq+μNZusw,通过模糊系数μNZ将切换控制项模糊化。
模糊规则表示:
Ifs(t)isNthenμNZisP
Ifs(t)isZthenμNZisZ
Ifs(t)isPthenμNZisP
其中,模糊集Z、N和P分别表示“零”、“负”、“正”,模糊系统的输出为μNZ。
虽然切换控制项保证了滑模控制的鲁棒性,但同时也造成了系统的抖振。为了消减抖振,应使切换控制项在达到较好鲁棒性能的同时尽量小,这样减少了控制项带来的干扰,更好地消减抖振。为此,可利用模糊规则集,对切换控制项进行模糊化。当干扰比较小时,使切换控制项较小;当干扰比较大时,使切换控制项较大。通过建立基于模糊切换控制的等效滑模控制,从而消除抖振[3]。
2双容水箱简介
双容水箱是比较典型的非线性、时延研究对象,所以可被用来进行非线性系统的辨识和控制等研究,因此是控制过程典型的代表。工业上许多被控对象的整体或局部都可以抽象成双容水箱的数学模型,具有很强的代表性,有较强的工业背景,对双容水箱数学模型的建立是非常有意义的。同时,双容水箱的数学建模以及控制策略的研究对工业生产中液位控制系统的研究有指导意义,例如工业锅炉、结晶器液位控制。同时,双容水箱的控制可以作为研究更为复杂的非线性系统的基础,又具有较强的理论性,属于应用基础研究[6]。此外,它具有较强的综合性和适用性,涉及控制原理、流体力学、智能控制等多个学科。
双容水箱的工艺流程构成图模型如图1所示[4]。

图1 双容水箱系统构成图
对双容水箱系统进行建模,得到数学模型为:
3仿真研究
先采用滑模控制与传统的闭环控制在相同条件下对双容水箱进行仿真并做比较。滑模控制与常值切换的Simulink仿真图如图2所示。

图2 滑模控制与常值切换的Simulink仿真图
得到的仿真结果如图3所示。

图3 滑模控制与常值切换的仿真效果图
由图3可知,采用滑模变结构控制的系统输出在稳态特性方面是无静差的,能很好地跟踪输入信号量的幅值,改善了原系统存在静差的状况。从动态特性上来看,输出曲线的超调量仅为8%,振荡不激烈,系统平缓,且上升达到稳态值时间很短;与传统闭环控制比较,调节时间也得到了缩短。所以从稳态和静态特性方面考虑,滑模控制都取得了很好的效果。但是该普通滑模控制存在一个抖振问题,即系统趋于稳态后,抖振非常剧烈。因此,下面我们采用模糊滑模来消减稳态后的抖振,以达到更好的控制效果。
对被控对象双容水箱进行仿真研究,知被控对象双容水箱的表达式,系统的状态方程为:
(10)
(11)


图4 外部的高斯干扰曲线
对于双容水箱系统,模糊滑模器设计步骤可概括如下。
① 对双容水箱系统模型进行分析,选择参数,构成希望的滑动模态。
② 求取不连续控制u,保证在超平面s=0上的每一点存在滑动模态,则该平面为滑动面。
③ 控制必须让系统状态进入滑动面,使其趋近与稳定状态。
④ 对模糊系数μNZ将切换控制模糊化。减小抖振,使其达到理想的控制效果和鲁棒性。
本文利用Matlab软件,运用其中一些函数,如newfis、addvar、addmf、rulelist等,实现模糊滑模控制器部分的设计[7-8],得到的隶属函数如图5、图6所示。

图5 模糊输出的隶属函数

图6 滑膜函数s的隶属函数
在Simulink中,对液位控制系统滑模变结构控制器的整体进行模拟设计,输入信号采用正弦信号[5]。仿真图及仿真结果如图7、图8所示。

图7 模糊滑模控制Simulink仿真图
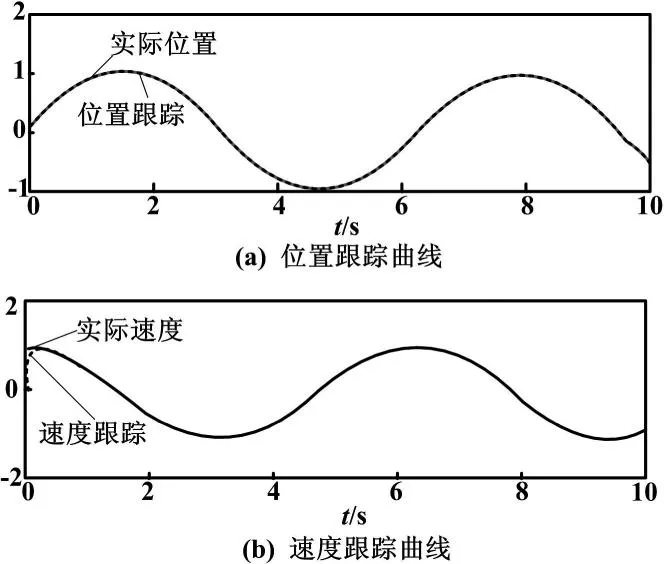
图8 模糊滑模控制时的位置和速度跟踪
4结束语
液位控制是工业生产中典型的非线性控制对象之一,常规的控制器很难达到较好的控制要求。本文采用模糊滑模控制与传统控制进行比较,无论从速度跟踪,还是位置跟踪都有很好的控制结果。把模糊滑模控制应用到液位系统中,模糊控制使滑模控制中抖振减小,消减了抖振在大负载高精度液位控制中的不良影响,从而确保了系统响应快,噪声小,柔化了控制信号,实现了整个系统对外部扰动和被控对象的不确定因素等较好的适应性及鲁棒稳定性控制,提高了系统跟踪性能精度,因此该控制器在液位控制中很有应用价值和前景。
参考文献
[1] 刘金琨.滑模变结构控制理论及其算法研究与进展[J].控制理论与应用,2007,24(3):407-418.
[2] 刘金琨.滑模变结构控制MATLAB仿真[M].北京:清华大学出版社,2012.
[3] Chen J Y.Expert SMC-based fuzzy control with genetic algorithms[J].Journal of the Franklin Institute,1999,336(4):589-610.
[4] 陈薇,吴刚.非线性双容水箱建模与预测控制[J].系统仿真学报,2006,18(8):2078-2085.
[5] Meriem B.Adaptive type-2 fuzzy sliding mode controller for SISO nonlinear systems subject to actuator faults[J].International Journal of Automation and Computing,2013,10(4):335-342.
[6] 赵科,王铁生.三容水箱的机理建模[J].控制工程,2006,13(6):521-524.
[7] 谢仕宏.MATLAB控制系统动态仿真实例教程[M].北京:化学工业出版社,2008.
[8] 蔡自兴.智能控制[M].北京:电子工业出版社,2004.
中图分类号:TP301
文献标志码:A
DOI:10.16086/j.cnki.issn1000-0380.201501021
修改稿收到日期:2014-07-12。
猜你喜欢
农业机械学报(2020年2期)2020-03-09 07:35:30
中华建设(2019年7期)2019-08-27 00:50:18
机电工程技术(2018年10期)2018-12-06 02:26:38
电子制作(2017年19期)2017-02-02 07:08:50
项目管理技术(2016年12期)2016-06-15 20:29:33
西南交通大学学报(2016年6期)2016-05-04 04:13:11
工业设计(2016年11期)2016-04-16 02:49:22
小雪花·成长指南(2015年10期)2015-10-23 08:37:37
机电信息(2015年3期)2015-02-27 15:54:44
