
Smith模糊PID匀速升温控制策略研究
2015-03-11 08:55:20ResearchontheControlStrategyofSmithFuzzyPID
自动化仪表 2015年1期
Research on the Control Strategy of Smith Fuzzy PID
for Uniform Heating Up Process
王晓娜1 左晓菲1 张 辉2 杨遂军1 叶树亮1
(中国计量学院工业与商贸计量技术研究所1,浙江 杭州 310018;浙江省计量科学研究院2,浙江 杭州 310013)
Smith模糊PID匀速升温控制策略研究
Research on the Control Strategy of Smith Fuzzy PID
for Uniform Heating Up Process
王晓娜1左晓菲1张辉2杨遂军1叶树亮1
(中国计量学院工业与商贸计量技术研究所1,浙江 杭州310018;浙江省计量科学研究院2,浙江 杭州310013)
摘要:针对电加热炉匀速升温过程模型建立困难、调节过程滞后等问题,提出了一种基于炉体散热补偿的Smith模糊PID控制算法。通过炉体散热补偿建立针对被控量升温速率的一阶线性纯滞后模型;采用Smith预估器消除纯滞后特性带来的影响,提高系统的稳定性,加快调节过程;引入模糊PID控制,克服Smith预估补偿环节鲁棒性差的弱点,实现参数的自适应调整,并提高了稳态精度,实现了高精度的匀速升温控制。试验结果表明,该控制策略的控制偏差低于5%,明显优于常规PID控制。
国家质检公益性行业科研专项基金资助项目(编号:201310102-1)。
修改稿收到日期:2014-06-24。
第一作者王晓娜(1975-),女,2004年毕业于浙江大学,获硕士学位,副教授;主要从事几何量精密测量和光电检测技术的研究。
关键词:电加热炉匀速升温Smith控制模糊控制炉体散热补偿
Abstract:Aiming at the problems existing in the uniform heating up process for electric furnace, i.e., difficult to establish the model, and lagged regulation, etc., the Smith fuzzy PID control algorithm based on furnace heat dissipation compensation is proposed. In accordance with the heating up rate of controlled object, the first order linear dead time model is established through furnace heat dissipation compensation. The influence brought by the dead time characteristic is eliminated by Smith predictor to improve the stability of system and accelerate the regulation process. The weakness of poor robustness of Smith predictor is overcome by introducing fuzzy PID control. Thus the self-adaptive regulation of the parameter is implemented and the steady state accuracy is enhanced for realizing high precise uniform heating up control. The results of experiments show that the control deviation of this control strategy is less than 5%, significantly better than conventional PID control.
Keywords:Electric furnaceUniform heating upSmith controlFuzzy controlFurnace heat dissipation compensation
0引言
近年来,智能控制技术发展迅速,模糊PID、专家PID、神经网络PID等控制算法已广泛应用于炉温控制器设计中[1-3]。这些控制算法大都是针对恒温调节设计的,对于匀速升温控制的高精度控制问题研究较少。较为典型的匀速升温控制算法有:杜井庆、高世桥[4]等提出的小区段设定值恒定PID算法,周黎英、赵国树[5]设计的Fuzzy-PID算法。小区段设定值恒定PID算法在工程应用中取得了较好的效果,但存在温度控制模型过渡滞后大、控制过程惯性大的问题;Fuzzy-PID算法能提高系统的鲁棒性,但无法克服纯滞后给过程控制带来的不稳定影响。
针对上述算法的不足,本文通过散热补偿方法建立升温速率一阶线性纯滞后模型,在模型的基础上分析被控对象的特性,采用Smith模糊PID算法控制炉体匀速升温。该控制策略克服了匀速升温控制过程中的大惯性和大滞后,取得了较好的控制效果。
1匀速升温建模
本文研究对象为功率1 500 W的圆柱形电加热炉。全功率下炉体系统的温度和升温速率响应曲线如图1所示。图1中,理想升温速率响应曲线为绝热系统的响应。然而,炉体散热决定了电加热炉不是绝热系统。根据热力学第一定律,通过对炉体加热功率加以散热补偿,可实现理想升温速率响应。
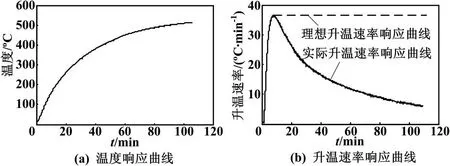
图1 炉体系统响应特性曲线
理想炉体对象的特性一般用带有纯滞后的一阶惯性环节来描述[6]。
传递函数模型为:
(1)
式中:τ为纯滞后,它延迟了被控量开始变化的时间,会给系统的控制带来不稳定因素;T为过渡滞后,它表示被控量要经过一段时间以后,才能到达稳定值,过渡滞后大,则过程惯性大;K0为放大系数。
根据动态特性参数法可求得模型参数。由图1中的温度响应曲线可得温度控制模型参数:τ=68s、T=2 503s、K0=0.02。由理想升温速率响应曲线可得升温速率控制模型参数:τ=68s、T=205s、K0=0.33。由模型参数知:升温速率控制模型过渡滞后小,过程惯性小,过程的动态响应快。因此,本文在升温速率控制模型的基础上设计控制算法。
2Smith模糊PID控制器设计
2.1 控制器结构


图2 Smith模糊PID控制系统框图
2.2 炉体散热补偿模型
Smith模糊PID控制系统需对控制器的输出加以炉体散热功率补偿。根据热力学第一定律以及功率与温度变化速率的关系,炉体散热补偿值为:
(2)
式中:P(k)为补偿的功率值;Vs(k)为k时刻的降温速率。通过试验求得炉体的降温速率,根据式(2)可计算得到炉体散热补偿值。
设在k时刻控制器实时测得的温度值为T(k),采样时间为t,则k时刻的降温速率为:
(3)
全功率加热炉体使温度升到500 ℃,记录炉体自由降温的温度值,通过式(3)计算降温速率,降温速率测试曲线与拟合曲线如图3所示。
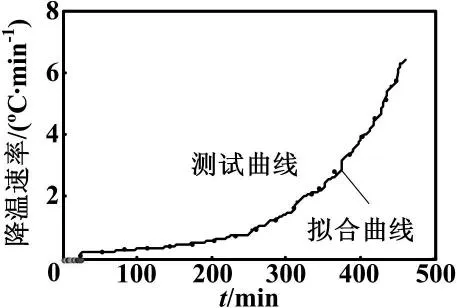
图3 降温速率曲线
根据图3所示数据,得到降温速率函数为:
Vs=1.415×10-7x3-5.179×10-5x2+
7.788×10-3x+7.29×10-2
(4)
式中:x为当前温度与室温的差值。
2.3 Smith模糊PID实现
2.3.1模糊推理
自适应模糊控制器以升温速率偏差e=r(t)-y(t)-ym(t)和升温速率偏差变化ec=de(t)/dt作为模糊控制器的输入,利用模糊控制规则在线对PID参数进行修正,并以PID参数的修正量(KP,KI,KD)为输出,以满足不同时刻系统偏差和偏差变化对PID参数整定的要求。模糊控制器的输入、输出变量都是精确量,而模糊推理是针对模糊量进行的[8]。因此,控制器首先要对输入量升温速率偏差e和升温速率偏差变化ec进行模糊化处理。
令模糊控制器各语言变量的论域如下。
|e|: { 0,1,2, 3},|ec|: { 0,1,2, 3}
KP:{ 0,1,2, 3},KI:{ 0,1,2, 3},KD:{ 0,1,2, 3}
各输入输出语言变量的的论域均取语言值“大”(B)、“中”(M)、“小”(S)、“零”(Z)4 种,选用三角函数作为各变量的隶属度函数。
经过反复调试控制升温速率,根据升温速率的响应结果,模糊推理合成得到模糊控制查询表,如表1~表3 所示。
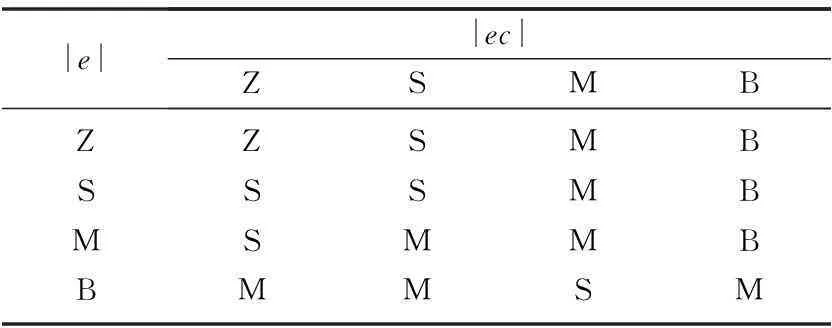
表1 KP的模糊控制表

表2 KI的模糊控制表
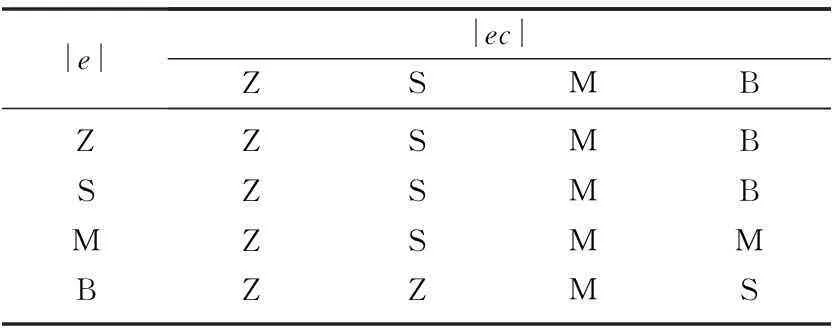
表3 KD的模糊控制表
根据模糊规则表,由采样偏差e和偏差变化ec可以得到KP、KI、KD的模糊值。采用重心法解模糊,得到调整后的KP、KI、KD值。
2.3.2Smith模糊PID
模糊推理实现PID参数的自适应调整。当模型参数时变或模型与对象特征不一致时,克服Smith预估补偿环节鲁棒性及抗扰性差的弱点。
Smith预估控制算式为[9]:
(5)
经过Smith预估补偿后,PID控制器的输出为[10-11]:
(6)
e(k)=r(k)-y(k)-ym(k)
(7)
式中:u(k)为控制器的输出;r(k)为给定的升温速率期望输出;y(k)为实际升温速率输出;e(k)为偏差信号;KP、KI、KD分别为比例、积分和微分增益。
3结果分析
3.1 加散热补偿的使用效果
控制加热炉以10 ℃/min的升温速率匀速升温,在采用散热补偿和不采用散热补偿两种情况下分别获得温度控制曲线,如图4所示。由图4可以看出,加散热补偿的温度曲线线性偏差明显低于不加散热补偿的相应曲线线性偏差,控制效果得到显著改善。

图4 10 ℃/min的响应曲线
3.2 不同升温速率下的使用效果
采用本文的算法控制加热炉分别以2、5、10、20(单位:℃/min)的升温速率匀速升温,其控制效果如图5所示。当加热炉温度升高到80 ℃时,用秒表开始计时,每分钟记录一次温度,共计11次。
(8)
式中:Δv为升温速率偏差;v为升温速率;T10为第10 min时的温度;T0为开始用秒表计时时刻的温度;t为10 min。

图5 2、5、10、20 ℃/min匀速升温曲线
按式(8)计算升温速率的偏差,计算结果如表4所示。

表4 程序升温速率的偏差
从表4中的升温速率误差计算结果可以看出,使用Smith模糊PID算法控制的升温速率偏差均低于5%。
3.3 与常规PID算法比较
采用本文设计的算法与常规PID算法分别控制系统以10 ℃/min的目标升温速率匀速升温,得到如图6所示的升温曲线。按照式(8)计算,常规PID算法的升温速率偏差为12%,Smith模糊PID算法控制的升温速率偏差为3.5%,后者明显优于前者的升温速率控制精度。

图6 10 ℃/min匀速升温曲线
4结束语
针对常规PID控制算法在匀速升温控制中的不足,本文提出了带有炉体散热补偿的Smith模糊PID控制算法。该控制算法不仅解决了一阶线性纯滞后模型控制升温速率过程中出现调节滞后的问题,而且具有稳态精度高、抗扰动性好、鲁棒性强等优点。试验结果表明,该算法控制升温速率的偏差低于5%。
参考文献
[1] Shamsuzzoha M,Skliar M,Lee M.Design of IMC filter for PID control strategy of open-loop unstable processes with time delay[J].Asia-Pacific Journal of Chemical Engineering,2012,7(1):93-110.
[2] 罗雄麟,平洋.电加热器匀速升降温过程中温度及其变化速率的多模型智能切换控制[J].化工自动化及仪表,2010,37(11):14-18.
[3] 金以慧.过程控制[M].北京:清华大学出版社,1993:18-21.
[4] 杜井庆,高世桥,罗创,等.基于PID算法的控制量按任意函数变化的一种控制方法[J].仪器仪表学报,2011,32(6):1317-1323.
[5] 周黎英,赵国树.模糊PID控制算法在恒速升温系统中的应用[J].仪器仪表学报, 2008, 29(2): 405-409.
[6] 刘芳,曹江涛,李平.水箱液位的模糊免疫PID控制[J].自动化仪表,2013,34(8):46-49.
[7] 冯冬青,任雪梅.模糊PID在网络控制系统中的仿真研究[J].自动化仪表,2013,34(1):61-63.
[8] 余勇,万德钧.一种基于smith预估器的温度控制系统[J].自动化仪表,2000,21(1):36-40.
[9] Tan W.Tuning of amodified Smith predictor for processeswith time delay[J].Control Theory&Applications,2003,20(2):297-301.
[10]Wu H,Yu J Q.Study on Smith-fuzzy self-tuningPID controlalgorithm of temperature for regenerative magnesium reduction furnace[C]∥Chinese Control and Decision Conference,2009:2395-2398.
[11]殷华文.程序控温算法研究[J].自动化仪表,2013,34(9):13-18.
中图分类号:TP273+.3
文献标志码:A
DOI:10.16086/j.cnki.issn1000-0380.201501024
猜你喜欢
玻璃(2020年2期)2020-12-11 22:20:04
制造技术与机床(2017年6期)2018-01-19 02:41:07
儿童故事画报·发现号趣味百科(2017年1期)2017-06-01 06:09:41
工业炉(2016年1期)2016-02-27 12:34:12
纯碱工业(2015年3期)2015-12-03 07:44:06
中国经贸导刊(2015年27期)2015-10-10 10:24:59
电源技术(2015年9期)2015-06-05 09:36:06
石油工程建设(2014年5期)2014-03-20 15:24:40
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:54
天津冶金(2014年4期)2014-02-28 16:52:54
