用于单轴旋转惯导系统的非接触信号传输技术
2015-03-11 05:16陈京谊赵寅秋
导航定位与授时 2015年3期
高 岩,陈京谊,赵寅秋
(航天科工惯性技术有限公司,北京 100074)
用于单轴旋转惯导系统的非接触信号传输技术
高 岩,陈京谊,赵寅秋
(航天科工惯性技术有限公司,北京 100074)
针对旋转惯导系统内使用的导电滑环具有寿命低、可靠性差、传输信号带宽窄的缺点,设计了一种基于激光通信的非接触信号传输装置,用于代替导电滑环传输电信号,可大大提高使用寿命、传输信号精度、可靠性和带宽。文中详细介绍了装置的设计原理、技术实现及验证,该装置具有RS232、RS422、CAN、TTL等多种输入输出接口,可满足大部分惯导系统信号传输要求,有效传输距离为20~80mm,经过各个环节的精密设计,可保证10-7量级的传输精度,通过各种测试充分验证了该装置代替导电滑环传输电信号的可行性,为提高旋转惯导的可靠性奠定基础。
旋转惯导;非接触;导电滑环;激光通信
0 引言
为了提高惯性导航系统的精度,一般采用旋转惯导技术以补偿惯性元件漂移对导航精度的影响。该技术相当于在惯导系统的外部添加旋转和控制机构,使惯性元件在惯导系统的一个转动周期内产生的常值漂移与导航产生的误差相互抵消。然而目前该旋转惯导技术中普遍采用的用以传输供电和数据信号的导电滑环在旋转时电刷触点与环体接触并产生摩擦,因而导致采用该技术的旋转惯导系统具有寿命低、抗电磁干扰差、信号传输带宽窄等问题,愈发不能适应设备发展的需要[4]。
本文提出了一种以近距离无线光通信为基础的非接触信号传输装置,用来代替旋转惯导中的导电滑环传输数据信号。结合现有的非接触电能传输装置,可完全取代导电滑环进行电能和数据信号的传输。由于无线光通信是以激光为载波,通过大气信道进行信息传输的通信方式,只要路径无遮挡,通过合理的电路设计和光学设计,信号就可以顺利地到达另一端。且无线光通信具有速率高、频带宽、信息容量大等优点,发射、接收无需接触,因此,可做为相对旋转结构设备信号传输的最佳选择。
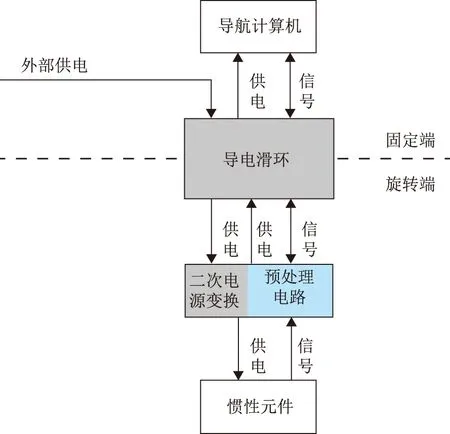
图1 旋转惯导一般组成Fig.1 General composition of rotating INS
1 旋转惯导对非接触传输技术的需求
一般,旋转惯导主要由惯性元件、预处理电路、二次电源转换模块、导航计算机、导电滑环、电机及其驱动控制电路等几大部分。惯性元件包括加速度计和陀螺仪,用于感知运载体的线加速度和角加速度,通过计算得到运载体的位置、速度、姿态,达到导航的目的。旋转惯导各主要组成部分电气连接关系如图1所示,位于旋转端和固定端的电气连接如供电、信号均是通过导电滑环来传输的,但导电滑环触点与环体长期摩擦,会导致性能下降、可靠性低、抗电磁干扰能力差,对于高速的数字信号,传输衰减大。而本设计中的非接触信号传输装置,能够代替导电滑环传输高速信号,弥补了导电滑环的不足。

图2 非接触信号传输装置与旋转惯导的连接Fig.2 Connection between non-contacted signal transmission device and rotating INS
在旋转惯导中应用了非接触信号传输装置和非接触电能传输装置后,组成原理如图2所示。位于旋转部分的旋转惯导预处理电路和位于固定部分的导航计算机之间的通信不再通过导电滑环,而是经过非接触信号传输装置,旋转惯导预处理电路发出的信号,经非接触信号传输装置的旋转端处理电路,转换成光信号,发往固定端处理电路再转换成原来的电信号,送往导航计算机,反之亦然。
2 非接触信号传输装置的技术实现
2.1 信号转换模块总体设计 经多方调研,为满足大部分旋转惯导的通讯要求,装置至少应具备2路RS422收发双向接口、2路RS232收发双向接口、1路CAN总线接口,用于导航机与预处理电路之间信息交互;3路TTL信号接口,用于复位和同步,RS422、RS232、CAN总线通信误码率不大于10-6,TTL信号波形展宽误差不大于1μs,信号延迟时间不大于2μs。针对上述要求,选择近距离无线光通信的方案,该方案具有成本低、安装简单、快捷等优点,如图2所示,非接触信号传输装置由固定端信号转换模块和旋转端信号转换模块组成,两端电路是一对互逆的电路处理关系,为使电路简化,采用通用设计,组成结构相同,每块电路均由供电单元、电平转换单元、FPGA单元、电/光转换单元、光/电转换单元、光学天线等几大部分组成。信号转换模块组成原理如图3所示。

图3 旋转(固定)端信号转换模块原理Fig.3 Principle of signal conversion module on rotating(fixed) end
2.2 信号转换模块总体设计
2.2.1 供电单元
两端电路均为+5V供电,功率不大于5W。
每块电路内部均需要+5V、+3.3V、+2.5V、+1.2V供电,其中,+5V供电直接由来自外部的+5V提供,+3.3V由LINEAR的电源芯片LT1764A-3.3产生,+2.5V由TI的REG1117A-2.5产生,+1.2V由TI的REG1117A产生。
2.2.2 电平转换电路
电平转换电路的功能是将输入输出的多路电信号的信号电平格式转换成与FPGA输入输出端口相匹配的电平格式。
RS422电平转LVTTL电平采用DS26C32实现,LVTTL电平转RS422电平采用DS26C31实现,RS232电平转LVTTL电平和LVTTL电平转RS232电平采用MAX205实现,TTL电平与LVTTL电平的转换采用SN74ALVTH16245实现,CAN信号与LVTTL电平转换采用SJA1050实现。
2.2.3 FPGA处理单元
FPGA单元采用硬件描述语言,主要实现将输入的多路电信号按一定码型规则进行编码,编码后以1路串行数据流按bit位1位1位输出,输出频率由系统时钟分频所得,同时,FPGA单元接收光/电转换单元输出的1路串行数据信号和1路时钟信号,将其按规则解码恢复出原信号,解码的时钟由时钟数据恢复电路提供。FPGA采用Xilinx的XCS3S250及其外围器件组成,该器件具有功率低,响应速度快的优点。
为保证信号精度指标,装置设计中对多路(9路)输入电信号进行10倍过采样,然后由FPGA把过采样数据编码成1路数字信号,经电/光转换后以光信号发出,采样时钟为62.5MHz,对方接收后,仍需要用62.5MHz的解码时钟,将数据1位1位的分配到各个电信号接口,恢复出原信号[1]。
2.2.4 电/光转换单元
电/光转换单元用于将编码后的电信号转换成光信号发射出去,由接口转换电路、激光器驱动电路、激光器等组成,接口转换电路将FPGA输出的电信号电平格式转换成驱动电路可接收的格式提供给激光器驱动电路,激光器驱动电路再将输入的信号进行放大,驱动激光器发光,将串行脉冲码发射出去。
接口转换电路采用MAXINM的MAX9371来实现,将FPGA输出的TTL电平转换为LVPECL电平输出给后端的激光器驱动电路;激光器驱动电路采用MAX3738来实现;激光器采用半导体激光器,中心波长为850nm,激光器内集成监测探测器“PD”,用来监视激光器发光强弱的,驱动器可根据激光发光强弱进行功率调整。
2.2.5 光/电转换单元
光/电转换单元功能是接收对端光信号,并转换成电信号,此时的信号是对端经过编码的串行信号。电路由线性放大电路、限幅放大电路、时钟数据恢复电路、光电探测器组成,线性放大电路将光电探测器输出的弱电信号进行高倍放大,能够被后端电路识别;限幅放大电路将前端信号放大,并将信号幅度限定在后端电路可接收的范围内。
光电探测器采用高灵敏度的硅雪崩光电二极AD500系列,具有极高的灵敏度,可探测微弱的光信号。线性放大电路采用两级放大,第一级为高倍数放大,第二级为低倍数放大,主要用于阻抗匹配和缓冲,放大器采用射频放大器AD8350来实现,该芯片工作频率为1.2GHz,满足装置的设计要求。限幅放大电路和时钟数据恢复电路采用集成芯片ADN2814来实现,该芯片是AD公司生产的专用于时钟和数据恢复的器件,ADN2814可接收的输入信号频率为10~675MHz,无需外部参考时钟即可将输入信号的频率时钟信号恢复出来。
2.2.6 光路设计

图4 非接触信号传输光路Fig.4 Optical path of non-contacted signal transmission
光路设计主要包括光发射天线和光接收天线的设计。发射天线将激光器发出的光束进行扩束,以一定的发散角发射出去,若要保证足够光功率能够到达对端,则需尽量减小光功率的几何损耗,由于旋转惯导的旋转动作,则要求光发射到对端的光斑完全覆盖住发射天线和接收天线,即光有效区域,这样,无论怎么旋转,对端都能接收到光信号。设计中,发射天线由凹透镜构成,光经凹透镜天线以全角50°发射,传输距离为30mm,如图4所示,光斑直径D应按如下公式计算
D=2Ltan25°
(1)
将L=30mm代入,得到D16mm,而设计中,发射天线和接收天线所处的光有效区域直径为8mm,发射端与接收端在相对旋转时的轴向偏差不大于0.1mm,因此,可顺利的进行信号传输。
光接收天线将对端发射过来的光进行聚拢接收,送往光电探测器并滤波。设计中,接收天线采用凸透镜与滤光片组合而成,滤光片位于凸透镜与光电探测器的中间,由于激光器工作波长为850nm,因此,滤光片的设计使850nm中心波长的光通过,避免了其他杂散光的干扰。
3 非接触信号传输装置的测试及验证
装置样机设计完成后,需进行全面性能指标测试,充分验证其代替导电滑环进行旋转惯导信号传输的可行性。
3.1 测试平台搭建
测试平台组成及工作原理如图5所示。主要由工控机、直流电源、示波器三大部分组成,工控机用来提供多路接口的输入信号和输出信号的采集、测试结果显示等,直流电源用来提供固定端信号转换模块和旋转端信号转换模块的两路+5V供电,示波器用来监测光通信是否正常。其中,为了能够全面测试各个输入输出接口的通信功能与性能指标,工控机内需安装相应的功能板卡,计算机总线采用PCI总线,功能板卡提供以下接口:
1)提供4路RS422通讯接口;
2)提供4路RS232通讯接口;
3)提供8路TTL脉冲输出和8路32位计数器功能;
4)提供2路CAN总线通讯接口。
测试平台与信号转换模块模块之间连接关系如图5所示。

图5 测试平台组成及原理Fig.5 Composition and principle of test platform
3.2 测试过程及结果
模拟旋转惯导旋转姿态的测试工装如图6所示。旋转工作台由一个三方向可调节的支架和一个可旋转的轴承来模拟,旋转端处理电路安装在轴承的旋转平面上,固定工作台由一个三方向可调节的支架来模拟,固定端处理电路就安装在支架上。通过调节支架上的旋钮,可以上下、前后、左右调节两个电路板中心的相对位置,使光发射、接收天线对准,保证发射出去的光斑能够覆盖到对端的光有效区域。

图6 模拟性测试图Fig.6 Simulation test
当光发射、接收天线对准后,上电,可看到示波器监测的TTL输入输出波形。拨动轴承的旋转平面,进行各接口功能和性能指标的测试。
串口测试中,RS422与RS232测试同时进行,双向共8路,RS422波特率设置为614.4kbit/s,RS232波特率设置为115.2kbit/s,每帧数据包括帧头、帧尾、数据长度、数据、校验和共13个字节,每个字节包括1个起始位、8个数据位、1个停止位共10位,单次通讯不少于100000帧,重复多次,均未出现丢帧、错帧,满足了10-6精度指标要求。
TTL测试中,由计算机控制脉冲计数卡向每个TTL端口输入脉冲宽度为10μs、频率为1kHz的脉冲,同时用计数器采集脉冲频率和脉冲宽度,电/光和光/电转换的时钟基准是62.5MHz,转换过程中信号脉冲宽度和周期将存在最大两个时钟周期的误差,而脉冲和计数器的时钟基准是20MHz,按最大两个时钟周期误差计算,波形脉冲宽度总的误差最大为132ns,频率误差最大3Hz,实际测试单次不少于1000000个脉冲数,脉冲宽度和频率均在误差范围内。
CAN总线接口测试中,两路CAN总线接口进行互发互收测试,传输波特率设置为250kbit/s,每帧数据8个字节,单次通讯9000帧,累计通讯不少于100000帧,均未出现传输错误。
调整测试工装支架,不断改变光传输距离,重复上述测试,测试结果表明在传输距离为20~80mm下,传输精度均能达到计数指标要求。
装置测试验证后,与所内单轴旋转惯导对接测试,在30mm的传输距离下,旋转频率为2r/s的转速下,单次传输数据不少于10000帧,累计传输数据不少于10帧,均未出现丢帧、错帧,每帧数据为24字节,每字节包括1个起始位,8个数据位,1个停止位共10位,每帧数据为240位,不少于10000帧无差错,结果表明装置具有10-7量级的传输精度。
4 结论
本文设计实现了可用于单轴旋转惯导的近距离非接触信号传输装置,具体可提供输入、输出接口各不少于9路,系统带宽不低于155MHz,有效传输距离为20~80mm,经过各个环节的精密设计,可保证10-7量级的传输精度,经过各指标的测试,充分验证了该无线光通信装置代替导电滑环传输电信号的可行性,装置也可用于其他相对旋转的设备中。为能彻底替代导电滑环,后期将继续进行非接触信号传输及非接触电能传输技术,以促进旋转惯导技术的大力发展。
[1] 王骐,王青萍.一种基于FPGA的高速误码测试仪的设计[J].电子设计工程,2011,19(9):129-133.
[2]AnalogDevices,Inc.ADN2814DataSheet[DB/OL].http://www.analog.com/UploadedFiles/Data_Sheets/ADN2814.pdf.2005.
[3] 傅承毓,谢木军,马佳光.自由空间激光通信及其关键技术[J].光电工程第26卷增刊.
[4] 李喜来,徐军,曹付允.自由空间激光通信关键技术研究[J].光通信技术,2006,9:58-61.
[5] 朱京平.光纤通信器件及系统[M].西安:西安交通大学出版社,2011.
Non-contacted Signal Transmission Technology Used in Uniaxial Rotating INS
GAO Yan,CHEN Jing-yi,ZHAO Yin-qiu
(Aerospace Science and Industry Inertial Technology Co., Ltd.,Beijing 100074,China)
A kind of non-contacted signal transmission device based on laser communication is designed to transmit electrical signals in rotating INS instead of electric conduction link,which has some disadvantages including short life span,poor reliabilibty and narrow transmission signal bandwidth.This device can greatly improve life span, transmission accuracy, reliability and bandwidth.It’s described in this paper that the design principle,technical realization and verification method of this device.Since it has multiple input & output interfaces,such as RS232,RS422,CAN and TTL,it can meet most of the requirements of INS signal transmission.A 10-7order of magnitude transmission accuracy can be ensured through sophisticated design of each link,with the effective transmission distance of 20~80mm.The feasibility of repalcing electric conduction link with this device is fully validated through a variety of tests. And this design has laid the foundation for the reliability of INS.
Rotating INS;Non-contact;Electricconduction link;Laser communication
2015 - 03 - 02;
2015 - 03 - 20。
高岩(1975 - ),女,博士,工程师,主要从事数字通信、测控技术等方向的研究
E-mail:gaoy0630@163.com
TP291.1
A
2095-8110(2015)03-0090-06
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
铁道机车车辆(2021年3期)2021-07-12
科学家(2021年24期)2021-04-25
石油和化工设备(2020年12期)2021-01-09
数字海洋与水下攻防(2020年5期)2021-01-04
看世界·学术上半月(2020年12期)2020-09-10
电子制作(2019年11期)2019-07-04
北京航空航天大学学报(2018年1期)2018-04-20
电子制作(2017年10期)2017-04-18
防爆电机(2016年4期)2016-09-15