无人机机载作动系统技术发展现状
2015-03-11 05:33张新华
导航定位与授时 2015年3期
张新华
(北京自动化控制设备研究所,北京 100074)
无人机机载作动系统技术发展现状
张新华
(北京自动化控制设备研究所,北京 100074)
首先介绍了高性能无人机机载作动系统组成,国内外应用现状和技术发展趋势,在此基础上分析了多余度电传飞行和作动系统所涉及的关键技术,最后给出研发该类系统的初步思路。
无人机;多余度作动系统控制单元;作动系统
0 引言
高性能无人飞行器是针对高空长航时大中型无人飞机而言,以高空无人侦察机和无人作战飞机为主,可用于侦察监视、通信中继、战区预警、电子对抗、区域导航、空中打击等方面,应用前景十分广阔,它的发展和应用将进一步促进空天一体化技术的快速发展。国外具有代表性的高空长航时无人机有全球鹰、捕食者、X-45、X-47等,这些无人机的研究和应用不仅大大牵引了航空领域作动技术的快速发展,同时也为国内相关技术的研究发展提供了很好的借鉴,本文主要针对国外高性能无人机中的作动技术现状进行分析,寻找差距,确定后续研究重点和需要解决的一些关键技术。
1 无人机机载作动系统范围及功能
高性能无人机作动系统可以分为:主作动系统,主要用于控制和驱动飞行器的方向舵、升降舵及副翼;辅助作动系统,主要用于驱动和控制飞行器增升装置中的襟翼、缝翼,以及水平安定面的配平操纵、扰流板等;起降装置作动系统,主要用于起落架收放、转向、锁定和相应的舱门开启等;发动机控制装置,主要用于发动机燃油控制、节流控制、推力矢量控制等;载荷控制装置,主要用于载荷舱体口盖以及释放装置开启等。表1给出了三类典型飞行器作动系统布局和使用情况。
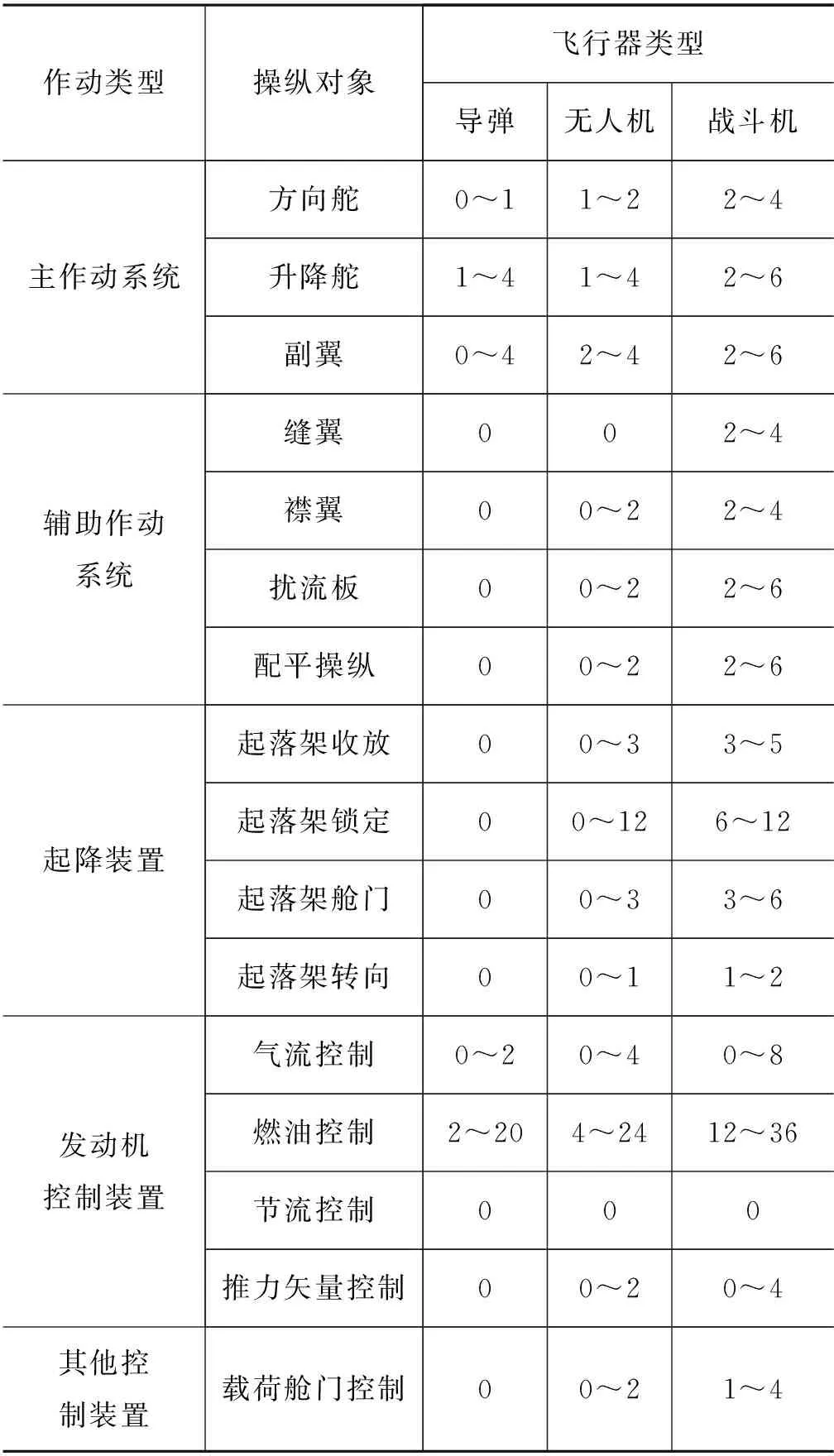
表1 各类飞行器对操纵及作动系统的需求[1]Tab.1 Demand of manipulation and actuation system of various types of aircraft
2 无人机机载作动系统应用现状
2.1 RQ-4全球鹰无人机的作动系统[2]
RQ-4全球鹰无人机由诺·格公司于1994年10月开始总体集成研制,1998年2月首飞。该无人机可在18000~19000m高度,以0.64马赫巡航飞行,续航时间超过32h。 如图1所示,全球鹰采用“V”型50°上反角尾翼和大展弦比下单翼布局,每片尾翼上各有两片组合的内外方向升降舵面,每个机翼有内侧和外侧外铰接式的扰流板,最外侧有两片铰接的混合副翼。这些操控面的操控装置采用通用电气航空机械系统公司研发的飞行控制作动系统。同时采用霍尼韦尔公司的BG1232双余度综合飞控系统,即:内外侧操纵面作动系统控制单元,余度设计采用不分主次的热备份方式。该系统具有耦合链接和冗余管理功能,可为系统提供两套功能相同的单元。

图1 全球鹰操控面布局Fig.1 Control surface layout of the Global Hawk
由于副翼、方向舵、升降舵和扰流板从结构上都被分为两个相同的独立部分,每个部分都被双余度综合作动系统控制单元中的一个单元控制,当一个单元发生故障时,相应的作动系统和操纵面会锁定在某个位置,这时作动系统控制单元利用控制冗余,自主调节,保持对飞机的正常控制,使其继续稳定飞行。耦合链接的飞行控制、双余度控制以及操控面和伺服系统的双余度设计为全球鹰提供了高可靠性。
全球鹰采用了可收放前三点式起落架。前起落架由赫罗克斯公司(Heroux Devtek)在F-5飞机起落架方案基础上改进而成,刹车采用古德里奇公司的电动刹车系统,该电动刹车系统也被应用到梦幻787客机等飞行器中;全球鹰Block 20的主起落架采用了F-16的起落架方案和部件,收放仍采用液压作动方式。
2.2 MQ-9捕食者无人机的作动系统[3]
MQ-9捕食者B(又称收割者)型无人机由美国通用原子航空公司在MQ-1基础上改进设计而来,最大飞行高度15.8km,滞空时间可达到36 h。捕食者B同样为下单翼飞行器,机身细长,采用大展弦比机翼和“V+I”形尾翼(见图2)。采用与“全球鹰”类似的冗余操控面布局,“V” 形翼中的每片尾翼上各有两片组合的内外方向升降舵面,“I” 形尾翼上有一个方向舵;每个机翼有内外两个铰接的扰流板,最外侧有两片副翼。由于早期的MQ-1全球鹰没有采用余度设计,因此,在多次参战过程中损失了10多架,改进后的MQ-9捕食者B采用了三余度综合作动系统控制单元,以及双余度伺服系统和双余度发动机控制系统。

图2 捕食者无人机操控面布局及起落架装置Fig.2 Control surface layout and landing gear of Predator UAV
捕食者系列无人飞机的起落架系统也采用前三点式布局。长柔性主起落架主要由单向玻璃纤维树脂构成,无减震器,其着陆过程中通过复合材料的弹性变形和轮胎摩擦耗散能量,前起落架采用了油气缓冲装置。

图3 X-45A无人机操控面布局Fig.3 Control surface layout of X-45A UAV
2.3 X-45A无人机的作动系统[4]
X-45A无人战斗机是联合无人空中作战系统的一部分,1997年开始由波音公司集成研制,该系列无人机主要有X-45A、X-45B、X-45C。X-45A采用后掠翼隐身无尾翼结构布局设计,翼展10.4m,机长8.1m,满载总质量6804kg左右。最大飞行高度可达26km,巡航速度0.8马赫,于2002年进行首飞试验。该无人机采用六个尾部边条升降翼和一个航向推力矢量发动机进行飞行控制,每个机翼安定面后面分别布置内侧、中部和外侧操控翼面,外侧和中部操控面位于一个可以拆卸的翼面上(见图3)。在起飞、巡航和着陆过程中,通过对这些操纵面进行对称、差动及组合控制,实现飞行姿态的调整。整个无人机采用了18个电动执行机构,分别用于操控面、起落架转向及收放,所有电动执行机构由HR Textron公司研制。弹药舱门由穆格公司研制的一个旋转式电动执行机构进行控制。X-45A无人机也采用了双余度作动系统控制单元(VMS),VMS包括了柯林斯公司研制的一个GEM III GPS装置、霍尼韦尔公司研制的一个HG-1700AG27惯性导航装置、一个HG7805AA03 雷达天线以及2个603E型PowerPC处理板。
2.4 X-47无人机的作动系统[5]

图4 X-47A无人机多余度飞控与作动系统Fig.4 Redundancy fly and actuation systems of X-47A UAV
X-47无人机由诺·格公司研制,主要型号有X-47A 和X-47B。X-47A 是小尺寸验证机,X-47B 则是世界上第一种陆基和航空母舰都能使用的无人侦察攻击机,是X-47A 无人机的发展型。X-47系列无人机同样采用后掠翼隐身无尾翼结构布局设计,采用4个尾部的边条升降操控面进行飞行控制,每个机翼安定面后面分别布置内侧、外侧操控翼面,左右机翼中上部位还分别布置了两片扰流板。为增加X-47A无人机可靠性,同样采用了余度技术(见图4),X-47A无人机也采用了双余度作动系统控制单元,包括了BAE系统控制公司的2套综合飞控系统,该系统使用了Power PC 750处理器,具有1553B总线, RS-232以及RS-433等I/O接口,操作系统选用了CsLEOS系统以及BAE 系统公司开发的ARINC-653嵌入式系统。在该环境下诺·格公司自己开发了余度管理、任务管理、导航规律、发动机控制以及液压、电动及刹车作动装置的控制等算法和软件。导航装置采用了一个SRGPS 和2套霍尼韦尔公司的H-764 GPS/INS单元。受限于开发计划和重点验证项目,最初虽考虑了电动作动系统,但基于电能转换、工作范围、功率以及响应等限制,仍采用了传统的液压作动系统。液压作动系统包括一个与发动机连接的液压泵和一个以电驱动液压泵备份系统,采用MIL-H-83282液压油,系统压力可达到3000 psi,液压作动器是在快鹰(Hawker)水平尾翼作动器基础上进行改进的,液压作动器的动作依靠双余度电液伺服阀进行控制(EHSV)。
X-47的起落架是在A-6E和F/A-18C 基础上改进而来的,X-47B 还借鉴了F-14 飞机的着舰捕获钩方案进行改进设计。
2.5 无人机机载作动系统技术发展趋势
以上无人机代表着国外最新的研究和应用成果,体现在机载作动系统技术的发展趋势向着高可靠多余度、智能化、直接力控制、全电传化等方向发展,具体体现在:
1)高可靠的多余度技术。为保证无人机飞行的可靠性和安全性,大量借鉴了客机及军机相关技术,作动系统的控制单元均采用多余度,余度配置大都采用双余度或三余度容错飞行控制计算机。
2)带有智能的多功能综合信息管理。高可靠的多余度控制单元具有任务管理、余度管理、故障诊断及隔离、自主导航等多种功能。
3)多操控面组合控制和直接力控制。非翼身融合的全球鹰和捕食者无人机的“V”形操控面控制,与正常布局的导弹主要区别是,每个方向和升降舵是组合控制,即:每片操控面既起到升降还起到方向控制作用。为增加可靠性,还采用了多个冗余操控面。对于翼身融合的无人飞行器(X-45、X-47),一方面通过机翼后缘的多个内外边条操控面进行升降和方向控制,为增加飞行器在低空低速下等条件下的机动性和操控性,同时还采用了发动机尾喷管推力矢量控制技术。
4)全电传化技术。以电传为主的电动和电静液作动技术将取代发动机带动液压泵单元的液压作动技术。可以看出:无人机起降装置、操控面作动系统,采用电动作动技术是可行的。
3 无人飞行器作动系统关键技术
3.1 多余度配置及其控制与管理技术 应用余度技术一方面可以使系统达到很高的可靠性,但也会增加飞行系统的复杂性、质量、体积、成本及研制周期,因此,在余度设计时要综合考虑这些因素,在满足要求的条件下,系统的余度结构应尽量简单。从成熟应用的无人机余度配置可以看出,一般采用双余度和三余度作动系统控制单元。因此,无人机余度配置主要侧重研究采用双余度技术还是三余度技术,同时研究与之对应的操控面余度布局方式以及作动系统余度技术,然后依据冷热余度工作方式,解决控制过程中的力纷争问题,以及控制系统中数据和信号传递的方式。此外,进行余度配置时还需要考虑采用非相似余度配置技术还是相似余度配置技术。上述全球鹰、捕食者B、X-45、X-47基本都采用了相似余度配置。
多余度飞行控制重点研究多余度计算机的工作方式、计算机与外部接口间的通讯、自检测系统、作动系统控制和驱动装置、控制结构与控制律设计等内容。多余度飞行控制技术直接影响系统的可靠性和飞行品质,需要借鉴国内外先进的方案,提高多余度飞行控制技术水平。余度管理的目的是最大程度地提高系统的可靠性,使系统在正常工作时高效率地运行,发生故障后,系统性能降低最小,并对故障瞬态提供保护。
余度管理主要是信号的选择和故障监控与隔离,在无人机作动系统控制单元中对于信号的选择可以是中值选择和平均值选择。在设计故障监控方法时,主要选择比较监控和自监控两种方式。在进行故障隔离与切换时,一般需要研究余度逻辑设计,并采用软件隔离和硬件切换。
3.2 多操控面组合控制和直接力控制技术
由于高性能无人机飞行操控方式比较复杂,升降和方向控制一般采用控制面的操纵面组合控制,或者是多操纵面与直接力组合的方式。直接力控制技术是对常规飞行器控制技术的发展,它可以直接产生不改变姿态而改变期望航迹的气动力。这种控制方式通过多个操纵面组合,或多操纵面与发动机推力矢量组合控制实现,直接产生升力和侧向力。这些直接力可分为直接升力、直接侧向力及推力控制,如图5所示。在X-45无人机偏航控制过程中,采用了发动机的推力矢量控制及单侧机翼上,不同后缘襟翼的组合控制方式,不仅可以有效减小襟翼的偏转角,还能够迅速提高机动能力。因此,在研发翼身融合高性能无人机的同时,需要重点解决多个辅助操纵面和推力矢量组合控制的直接力控制技术[6]。

图5 X-45A无人机的操控面与推力矢量控制方式Fig.5 Control surface layout and thrust vector control method of X-45A UAV
3.3 多余度电动作动器技术
余度技术的另一项核心是要重点研究作动器的余度技术。国内外作动器研制经验表明:改进作动器各组成单元结构和制造工艺,提高可靠性可挖掘的潜力有限,无法满足载人航天以及飞机大幅增长的可靠性指标要求。受空间布局和传统战术导弹惯性思维的影响,目前国内战术级飞行器很少采用该技术。随着高性能无人机等项目的展开,需要开展多余度作动技术的研究,多余度电动作动器将会成为研究重点。主要研究同类及不同种类执行机构余度配置技术、力综合技术、带有容错功能的自身故障诊断与隔离技术、多余度执行机构传动技术等内容。
3.4 推力矢量机构技术
发展高性能无人机将提出自主起降、机动飞行等多种需求,常规气动布局操控面控制效率低,一般很难满足这些要求,需研制新型推力矢量执行机构。采用摆动、二元可调喷管或轴对称推力矢量技术,推力损失小,非常适合高空、长时间、远距离飞行的高性能无人飞机自主起降及机动等要求。国内外在中大型导弹与火箭、各种航空飞行器上已经大范围使用摆动喷管及二元可调节喷管技术,在X-45无人机中也采用了二元可调喷管技术。根据未来高性能无人飞行器的需求,需要并行发展二元以及空间轴对称推力矢量机构和控制技术。主要研究推力矢量机构构型、动密封与热防护技术、载荷分配及机构动力学、推力矢量作动系统等方面。
3.5 高可靠起降装置技术
起落架是高性能无人机起飞着陆的主要装置,无人机在起飞滑跑、着陆接地和地面运动时起落架应能承受并减轻机体受载。起落架还应使无人机在地面运动时具有良好的操纵性和稳定性。为了减少无人机飞行时的阻力,还应保证其收放的灵活性与可靠性。由此可见起落架是工作性能和可靠性直接影响整机的安全。高性能无人机的起落架也不单纯是一个结构,而是一种相当复杂的机械系统,需要重点研究缓冲、收放机构构型、刹车、电气系统、作动系统等。
4 结论及发展思路
作动系统技术是发展高性能无人机重点解决的关键技术之一,开发这类作动系统需要及时、长期、系统地开展国外相关技术情报查询、整理和分析工作,在对国内外高性能无人机机载作动系统研究和应用分析的基础上提出一些初步发展思路:
1)尽快完成无人机机载多余度电传作动系统专业技术的体系研究梳理出该类机载多余度电传作动系统技术体系。
2)随着高性能无人飞行器、临近空间飞行器等高价值装备的研究逐渐深入,单一形式的作动系统不再能满足系统性能及可靠性要求,应该紧密结合这些项目需求开展多余度作动系统技术研究工作。
3)多轴操控的推力矢量机构及其控制技术,相比传统的扰流片和燃气舵推力矢量技术,作为一种很好的直接力控制方式,具有多轴操控的二元推力矢量和空间轴对称矢量控制系统,效率更高,操控品质更好,应加快相关技术的发展研究。
[1] Aerospace Actuation 2008, Counterpoint Market Intelligence Limited[R].2009.
[2] 美国高空长航时无人机——RQ-4“全球鹰”[M].北京:航空工业出版社,2011,11.
[3] A NASA UAS SupportingLong Duration Earth Science Missions[R].NASA/TM-2007-214614.
[4] Kevin A Wise. X-45 Program Overview and Flight Test Status[C]//.AIAA 2003-6645.
[5] X-47A PEGASUS FLIGHT AND MISSION SYSTEMS DESIGN AND TEST[C]//.AIAA 2003-6628.
[6] Phu Nguyen,Stanley Mak. Simulation of Landing Events for an Unconventional UAV Landing Gear System Using Transient Dynamics Approach[C]//.AIAA 2006-1762.
Technology Development Status of UAV Actuation System
ZHANG Xin-hua
(Beijing Institute of Automatic Control Equipment,Beijing 100074, China)
This article introduces component, application status at home and abroad and development trend of technology of actuation system of high-performance UAV, and analyses key technology of redundancy fly and actuation system, and givens the preliminary idea of the system.
UAV; Control unit of redundancy actuation system; Actuation system
2015 - 03 - 12;
2015 - 04 - 02。
张新华(1972 - ),男,博士,研究员,主要从事伺服控制方面的研究。
TP273
A
2095-8110(2015)03-0055-06
猜你喜欢
汽车实用技术(2021年17期)2021-09-23
中原商报·科教研究(2021年6期)2021-05-13
百科探秘·航空航天(2020年8期)2020-07-29
铁道通信信号(2020年11期)2020-02-07
军民两用技术与产品(2019年12期)2020-01-19
汽车维修与保养(2019年7期)2020-01-06
电子制作(2019年20期)2019-12-04
汽车与新动力(2019年5期)2019-11-07
风能(2016年12期)2016-02-25
汽车维修与保养(2015年2期)2015-04-17