旋转调制光纤陀螺惯导寻北精度探索
2015-03-11 05:32徐海刚郭元江李志峰李海军
导航定位与授时 2015年3期
徐海刚,郭元江,李志峰,李海军,刘 冲
(北京自动化控制设备研究所,北京100074)
旋转调制光纤陀螺惯导寻北精度探索
徐海刚,郭元江,李志峰,李海军,刘 冲
(北京自动化控制设备研究所,北京100074)
高精度寻北是旋转调制光纤陀螺惯导实现高精度导航的前提,也是其技术优势的体现。针对当前旋转调制光纤陀螺惯导在快速高精度寻北中遇到的问题,对其寻北精度极限进行了深入研究,梳理出4项最主要的影响因素,对其影响机理、误差模型、量级进行了深入的分析,并通过样机试验进行了验证。结果表明,尽管随机游走系数是制约寻北精度极限的最终因素,但陀螺刻度系数误差、扰动速度、航向效应等误差处理不好,将严重影响旋转调制寻北精度;通过采取措施,高精度光纤陀螺旋转调制惯导5min寻北精度已达到35″(3σ),进一步提高精度的措施正在研究中。
寻北精度极限;旋转调制;光纤陀螺;随机游走;航向效应
0 引言
光纤陀螺在工程应用上具有全固态、环境适应性强、制造简单等特点;光纤陀螺惯导系统已开始在陆海空天各个领域的武器中获得大量应用[1-3]。随着国内对旋转调制技术研究的不断深入,人们逐渐认识到,旋转调制光纤陀螺惯导能够充分发挥光纤陀螺随机游走系数的优势[4],同时抑制其零位漂移对温度较为敏感的不足,有望实现高精度的寻北和导航,满足未来远程导弹、长航时舰艇、导弹发射车等武器装备对高精度、快反应、小体积惯导系统的需求,为此,国内开展了大量的相关研究[5-7]。
寻北是实现高精度导航的第一步。在研制旋转调制光纤陀螺惯导系统的过程中发现,尽管样机的旋转调制寻北性能体现出了一定的优势,但并未达到理论上的精度极限;为此,进行了全面深入的分析、改进和试验,有效地提高了寻北的精度,为下一步的工作奠定基础。
1 样机情况及问题
旋转调制光纤陀螺惯导系统在对准过程中,陀螺常值漂移以及受温度影响缓慢变化的漂移都可被调制平均,只有随机游走噪声不受调制作用,是理论上影响寻北精度极限φu ss的因素,通过分析,其关系可表示为
(1)

为进一步验证旋转调制光纤陀螺惯导的性能潜力,研制了单轴旋转调制光纤惯导样机,该样机由光纤陀螺、石英挠性加速度计、旋转机构、导航计算机、二次电源组成。其中,光纤陀螺和加速度计的主要技术指标分别如表1和表2所示。

表1 光纤陀螺性能指标Tab.1 The accuracy of FOG

表2 加速度计性能指标Tab.2 The accuracy of accelerometer
这里主要研究5min的寻北精度。根据式(1),该样机理论上5min寻北精度优于15″(3σ)。采用国军标定位定向系统定向精度测试方法,在转台上对样机进行了八位置寻北试验。其中,某次寻北过程中航向角的变化曲线如图1所示,八位置寻北结果如表3所示。

图1 航向对准曲线Fig.1 The heading of alignment
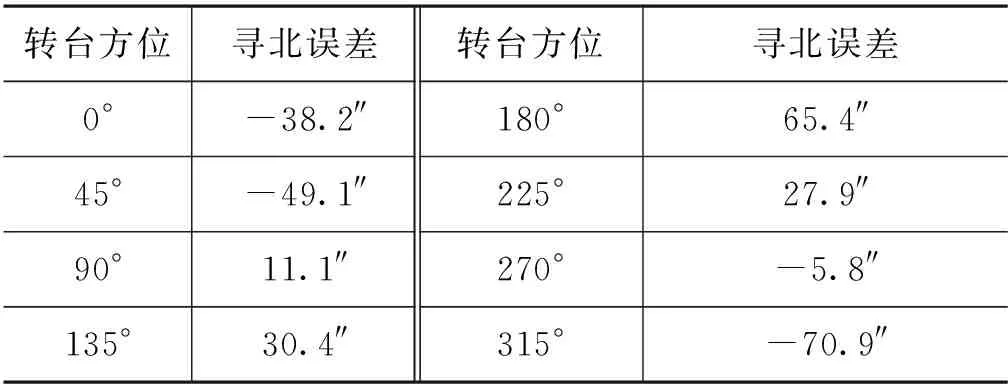
转台方位寻北误差转台方位寻北误差0°-38.2″180°65.4″45°-49.1″225°27.9″90°11.1″270°-5.8″135°30.4″315°-70.9″
由图1可见,在单次寻北过程中,航向角中存在周期性的波动,峰峰值可达240″(约0.07°);由表3可见,八位置寻北最大误差可达71″;样机的寻北精度远远没有达到预期的精度极限(15″)。因此,需要对影响寻北精度的所有因素进行分析,从而进一步改进设计,逐步逼近寻北极限精度。
2 影响因素分析
通过误差分析可知,影响寻北精度的主要因素包括以下四种:随机游走、陀螺刻度系数误差、扰动速度误差、航向效应误差。随机游走的影响已经分析,下面逐一分析其他三项的影响。
2.1 陀螺刻度系数误差
陀螺刻度系数误差会影响角运动测量的精度,特别是在旋转调制惯导系统中,陀螺刻度系数误差会造成旋转调制角速度测量不准,从而影响航向对准和航向角解调输出精度。
陀螺的刻度系数一般有对称性误差和不对称性误差两类。对称性误差造成旋转调制惯导系统中航向角误差与转动角度成正比,故单轴旋转调制惯导系统一般采用绕垂向轴进行正反往复旋转的调制方案;当IMU绕垂向轴正向旋转360°时航向角误差逐渐增大,当转回0°时减小为0;所以,对称性误差造成航向角误差以旋转周期上下波动,均值为0;不对称性误差会导致IMU转回0°时航向角误差不能回到0,当持续往复旋转时,航向角误差除了周期性波动外,还会持续增大。
通过测试发现,光纤陀螺的刻度系数主要以对称性误差为主,且受温度变化影响很大,在-40~65℃范围内可达2×10-3左右;不对称性误差很小。对系统进行了温度试验,刻度系数误差与温度的关系如图2所示,在温度为25~45℃的刻度系数变化为5×10-4,可造成航向角解调误差波动最大可达0.18°,将极大的影响航向对准精度,因此需要对刻度系数误差进行温度标定和补偿。

图2 补偿前刻度系数与温度的关系Fig.2 The relationship of scalar and temperature
采用二阶温度模型来拟合补偿对称刻度系数,即设对称刻度系数K为
K=a1T2+a2T+a3
(2)
式中,T为温度;a1、a2、a3分别为拟合参数。
图3为拟合补偿后的刻度系数与温度的关系。可见在温度为25~45℃范围内,刻度系数波动小于1×10-5,对应的航向角误差波动可缩小至13″。

图3 补偿后刻度系数与温度的关系Fig.3 The relationship of scalar and temperature after compensation
2.2 扰动速度误差
根据惯导的误差原理,惯导一般采用观测北向速度误差来估计航向角误差,从而实现航向对准,因此,对准过程中的扰动速度会直接影响航向对准精度或延长对准时间,而消除扰动速度则可提高对准精度并缩短对准时间。航向误差φu对北向速度δVn的影响可表示为
(3)
式中,g为地球重力加速度;t为时间。由式(3)可知,当对准时间为300s时,若需航向对准精度为15″,则相应的扰动速度应小于0.0006m/s。
造成扰动速度误差的因素主要包括速度杆臂、轴系晃动、基座稳定度等。其中,速度杆臂为主要影响因素。产生速度杆臂的原因是惯导测量中心与实际转动中心不重合。图4为补偿杆臂前后的北向速度量测信息,图5为补偿前后的航向对准结果。可见未补偿杆臂的速度波动较大,导致航向收敛速度较慢;补偿后速度误差可达0.002m/s,相应的航向对准误差可达15″。

图4 杆臂补偿前后的北向速度量测值对比Fig.4 The comparison of north velocity after lever arm effect compensation

图5 杆臂补偿前后的航向对准结果对比Fig.5 The comparison of heading after lever arm effect compensation
2.3 航向效应
航向效应是指在旋转调制惯导(或平台惯导)中,IMU在不同的转动位置时惯性仪表误差也随之改变;当进行旋转调制时,随着IMU的转动,陀螺、加速度计中存在呈周期性变化的分量。由旋转调制的原理可知,这一类误差不但不能被调制,反而会因整流效应在机体系表现出常值误差来,严重影响惯导的对准精度。
航向效应的影响因素很多,如外界磁场对系统影响、旋转机构磁场的影响、系统内部热场变化的影响。光纤陀螺漂移易受磁场影响,当IMU在不同方向时,外界磁场对系统的切割方式也不相同,陀螺漂移会随航向不同而变化,是引起旋转调制光纤惯导航向效应的主要原因。
为减小航向效应,需要深入分析内在的影响因素,有针对性的采取措施。例如,针对磁场的影响,需要在陀螺、IMU、电机等处进行磁屏蔽,消除作用到陀螺上的磁场;针对热场的影响,需要改进系统热设计,使系统内部热量分布尽量均匀,同时选择对温度敏感性较小的惯性仪表。
3 系统改进情况
以上述结论为基础,来分析图1和表3的结果。图1中,航向角中存在零均值、周期变化的误差,主要原因为垂向陀螺存在刻度系数误差;表3中,在不同的方向,航向对准误差也不相同,因此,系统中存在航向效应误差。
针对以上两种影响因素,在系统上采取了如下措施:一是对电机、陀螺、IMU采取了三层磁屏蔽,地磁场、电机磁场导致的航向效应误差减小到0.001(°)/h以下;二是对系统进行了温度标定,陀螺刻度系数误差减小到1×10-5以下。对改进后的系统再次进行对准试验,一次试验的航向角曲线如图6所示,转台八位置寻北的结果如表4所示。

图6 改进后航向对准曲线Fig.6 The heading of alignment after improvement

寻北位置精度寻北位置精度0°32.1″180°25.4″45°24.3″225°17.9″90°-18.1″270°-5.8″135°10.5″315°-30.9″
对比图6、表4与图1、表3可见,改进后航向对准过程中误差波动小于30″,远小于改进前的240″;改进后八位置寻北的最大误差小于35″,比原来的71″减小一半;改进后的对准精度得到了有效的提升。
尽管如此,从图6和表4可以看出,当前的寻北精度还未达到理论上的极限15″,还有其他的因素在影响对准精度。某次寻北过程中的速度误差曲线如图7所示,可见,存在约0.002m/s的扰动速度,通过式(3)计算,认为这是导致对准精度达不到极限的主要因素,需要进一步予以补偿;系统目前正在开展这一工作,初步分析认为,三个加速度计组合的尺寸效应误差、旋转机构的回转误差是造成速度误差扰动的主要原因。

图7 对准过程速度误差结果Fig.7 The velocity error of alignment
4 结论
本文针对旋转调制光纤陀螺惯导的寻北精度潜力进行了探索研究,研制了试验样机进行实际验证;给出了样机对准功能调制过程中出现的典型问题,指出了影响对准精度的主要误差源,并深入分析了影响机理,给出了处理措施,目前5min对准精度达到35″;后续将采取措施处理相关的误差源以进一步提高精度。
通过上述工作可见,旋转调制光纤陀螺惯导能够快速实现高精度,且具有很高的寻北精度潜力;随着国内光纤陀螺技术的成熟和旋转调制技术研究的不断深入,旋转调制光纤陀螺惯导有望成为新一代高精度惯导的典型方案。
[1] 吴亮华, 郑辛.高精度激光捷联惯导行进中方位对准技术[J]. 战术导弹控制技术,2008, (1): 73-78.
[2] 王世光, 王振军. 陆用定位定向与寻北仪技术应用现状[J].战术导弹控制技术,2010,27(2):14-17.
[3] 严恭敏, 严卫生, 徐德民. 纬度未知条件下捷联惯导系统初始对准分析[J].航天控制,2008,26(2):31-37.
[4] K R Britting. Inertial Navigation Systems Analysis[M]. New York: Wieley-Interscience, 1971.
[5] 周斌, 王巍, 蔡春龙. 单轴旋转式光纤陀螺惯导系统误差特性研究[J].导航与控制,2012,11(2):1-8.
[6] 刘勇,蔡体箐,芶志平,宋军.旋转光纤陀螺捷联式惯性导航系统[J].压电与声光,2009,31(3):315-318.
[7] 周斌, 王巍, 何小飞.旋转式光纤陀螺惯导系统随机误差抑制技术[J].北京航空航天大学学报,2013, 39(9):1204-1207.
Research on North-seeking Precision Limit of Rotation-modulating FOG-SINS
XU Hai-gang,Guo Yuan-jiang,LI Zhi-feng,LI Hai-jun,LIU Chong
(Beijing Automatic Control and Equipment Institute ,Beijing 100074,China)
The premise of rotation-modulating FOG-SINS achieving high accuracy navigation is high precision north-seeking, which is the embodiment of technical advantage. Aiming at the problem of quick and high accuracy north-seeking with rotation-modulating FOG-SINS,we study deeply on the precision limit of north-seeking. Four main influence factors are carded.We analyze deeply the influencing mechanism, error model and magnitude. A validation is made with test prototype. The result shows that though random walk is the final factor to restrict north-seeking precision limit, it will confine the precision a lot if gyroscopes scale factor error, perturbation velocity and heading effect cannot be dealed well. Through taking measures, the north-seeking precision of high accuracy rotation-modulating FOG-SINS can reach 35″ within 5min.
North-seeking precision limit; Rotation-modulation; FOG; Random walk; Heading effect
2015 - 3 - 23;
2015 - 4 - 15。
徐海刚(1979 - ),男 ,高级工程师,主要从事导航、制导与控制方面的研究。
E-mail:buaaxuhg@126.com
U666.1
A
2095-8110(2015)03-0011-05
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
舰船科学技术(2022年10期)2022-06-17
新世纪智能(高一语文)(2021年3期)2021-07-16
数字海洋与水下攻防(2020年5期)2021-01-04
学苑创造·A版(2019年9期)2019-11-07
民用飞机设计与研究(2019年4期)2019-05-21
北京航空航天大学学报(2018年1期)2018-04-20
学苑创造·B版(2017年1期)2017-02-21
学苑创造·B版(2017年1期)2017-02-21
电子制作(2017年24期)2017-02-02