水下航行体超空泡减阻数值模拟
2015-03-10 01:43:12金大桥贾林利王金玲耿瑞光
哈尔滨商业大学学报(自然科学版) 2015年5期
金大桥,贾林利,王金玲,耿瑞光,王 聪
(1. 黑龙江工程学院 机电工程学院,哈尔滨 150050;2. 哈尔滨工业大学 航天学院,哈尔滨 150001)
水下航行体超空泡减阻数值模拟
金大桥1,贾林利1,王金玲1,耿瑞光1,王 聪2
(1. 黑龙江工程学院 机电工程学院,哈尔滨 150050;2. 哈尔滨工业大学 航天学院,哈尔滨 150001)
利用Fluent6.3对水下航行体超空泡减阻进行了数值模拟,研究了水下航行体空泡形态和阻力系数的变化规律,分析了航行体的受力和减阻特性.结果表明,水下航行体在超空泡绕流时,压差阻力系数减小,摩擦阻力系数减小并趋于零,总阻力系数比无空泡绕流时大幅度降低,比流线型模型的也小;航行体的头部在超空泡绕流时承受了绝大部分阻力,尾段所受阻力减小至几乎为零;头部空化器直径增大,超空泡较易形成,但减阻能力降低,空化器直径过小,不能形成超空泡,不能有效减阻.
水下航行体;超空泡减阻;空泡形态;阻力特性;数值模拟
水下航行体在水中高速运动时,液流流经的局部地区,压强若低于某临界值,液体会发生相变,由液相变为汽相,产生空泡.随着航行体速度的不断增加,空泡逐渐发展就会形成超空泡.
水的密度是空气密度的 800多倍,物体在水中运动时所受到的阻力比在空气中运动时约高1 000倍.水下航行体速度提高受到很大制约,为保持水中恒定的速度,大型水下运动体的动力推进系统都很庞大,常规方法要明显地提高水下运动体的速度受到很大的限制[1].很长一段时间以来,研究人员探索过各种水下运动体的减阻办法,但这些减阻办法效果通常都不是很理想[2],利用超空泡进行减阻的技术,打破了以往水下航行体设计尽量避免空化的思想,是实现水下高速运动的新方法.形成超空泡后,包裹航行体的不是水,而是水蒸汽,航行体从阻力巨大的水绕流变成了阻力大大减小的空化绕流,从而能大幅度提高其速度和航行距离.俄罗斯(前苏联)、美国等国家基于这一原理已研制成功了水下超空泡武器[3],该方向的研究受到了国内外学者的广泛兴趣[4],近年来国内也开展了初步的数值模拟和试验工作[5].但钝体绕流包含了相变、湍流、非定常等绕流中的复杂现象,对其空化绕流研究开展的还不够深入,大规模的工程应用也不成熟,因此,深入研究其规律具有重要的理论和现实意义.
本文基于均质平衡多相流理论,采用CFD通用商业软件包Fluent6.3对水下航行体空化绕流进行了数值模拟,探讨了水下航行体利用超空泡技术进行减阻的规律.
1 物理模型
假设流体由水和水蒸汽及非凝性气体组成,并考虑空化流动中水和水蒸汽间的相变及流体中含有的非凝性气体的影响,根据均质平衡流的理论,用同一组方程描述其流动状态,求解混合流场的湍流方程和输运方程.其控制方程如下[6]:
连续性方程为
(1)

动量守恒方程为

(2)

水蒸汽相输运方程

(3)

相变率方程
(4)
(5)
其中:pv为计算温度下的水饱和蒸汽压;Vch为特征速度;ρl为水相的密度;Cc、Ce为经验常数,本文分别取0.01和0.02.
2 数值计算方法
2.1 计算模型
利用超空泡减阻的航行体与一般流线型水下航行体结构不同[7],航行体由空化器、圆锥段、圆柱段组成,头部是钝体的空化器,尾端也是钝体,没有收缩段,如图1.数值计算模型圆柱段直径D为15 mm,空化器直径d=0.33D,模型长度L=15D,通过改变空化数以及航行体头部空化器直径进行数值模拟,研究航行体的空泡形态和阻力特性的变化规律.

图1 水下航行体的计算模型
2.2 控制方程的求解
利用软件Fluent6.3进行数值求解.湍流模型采用标准k-ε模型,采用基于压力的隐式算法,利用SIMPLEC算法求解速度场和压力场的耦合,对于混合密度、动量方程、水蒸汽相的离散采用二阶迎风格式,压力项离散采用标准格式[8].模型和流场都是对称的,建立二维轴对称模型,求解时取对称轴以上部分进行,这样可以节省计算资源.采用结构化网格,对模型壁面附近等参数梯度变化较大的重点计算区进行网格局部加密.边界条件设置入口是速度入口,出口是压力出口,通过改变速度入口条件进行数值模拟,模型壁面是非滑移条件的壁面,中间是对称轴,如图2.

图2 网格、边界条件示意图
3 数值模拟结果及分析
3.1 水下航行体空泡形态变化规律
研究空化绕流的重要无量纲相似数是空化数,其定义为:
(6)
其中:ρ∞为无穷远点参考压力;ρ为水密度;V为流场速度.
水下航行体空泡形态随空化数改变而产生变化,如图3.空化数较大情况下,不能形成空泡,航行体是水绕流,空化数减小时,在航行体头、尾这些弹体外形突变区域开始出现空泡,随空化数继续减小,空泡的长度和直径都增大,空化数减小到一定值,头、尾部的空泡相连,在整个航行体外部形成近似于长椭球体形的空泡包络,即形成了超空泡,这时水下航行体只有头部是沾湿面,是空化绕流.
图3 空泡形态随空化数的变化
3.2 水下航行体阻力系数变化规律
为研究水下航行体阻力系数的变化规律,把总阻力F成分成压差阻力Fp和摩擦阻力Ff两部分进行考虑,分别计算总阻力系数Cd、压差阻力系数Cp和摩擦阻力系数Cf的变化[9].
(7)
Cd=Cp+Cf
(8)
其中:S为特征面积,这里取圆柱段横截面积.
空泡的形态变化影响航行体的阻力特性,阻力系数变化如图4.空化数较大情况下,即航行体是水绕流时,压差阻力系数、摩擦阻力系数、总阻力系数都较高,且变化较小.随着航行体头部、尾部形成局部空泡,头、尾部形成近似长椭球体型的空泡包络,是流线良好的外形,压差阻力系数会大幅度降低,前部和后部的空泡形成后,压差阻力系数基本不变化;由于弹体沾湿面积减小,空泡形成过程中,摩擦阻力系数大为减小,形成超空泡后减小到基本为零.所以,形成空泡过程中,总阻力系数逐渐减小,生成超空泡后,总阻力系数近似等于压差阻力系数,基本不再变化,是一个比较低的数值.计算模型总阻力系数在形成超空泡后接近于0.11,比未形成空泡时减小以上,比一般流线型模型的阻力系数也小[10],水下航行体从而实现了利用超空泡进行减阻的目的.

图4 阻力系数随空化数的变化规律
3.3 水下航行体弹体受力分析
为研究水下航行体弹体的受力,分别考虑航行体的头部空化器压差阻力F1P和摩擦阻力F1f、尾段压差阻力F2P和摩擦阻力F2f的变化规律.如图5,在空化数较大时,头部的压差阻力、尾段的压差阻力和摩擦阻力占总阻力F的比例都较高,在30%至40%之间,并且变化较小,头部空化器由于尺寸较小,摩擦阻力占总阻力的比例很低,接近于零.随空化数减小,空泡形成,尾段的压差阻力和摩擦阻力占总阻力的比例都减小,形成超空泡后,占总阻力的比例都接近于零,头部压差阻力占总阻力比例逐渐加大,形成超空泡后,占总阻力的比例达到90%以上.

图5 头部和尾段受力情况
对于整个航行体,头部受到的阻力F1和尾段阻力F2占总阻力的比例变化如图6,在未形成空泡时,头部和尾段阻力占总阻力的比例基本不变,分别在30%和70%左右,随空化数减小,空泡逐渐发展,头部阻力占总阻力的比例逐渐上升,尾段阻力占总阻力的比例逐渐下降,形成超空泡后,头部阻力占总阻力的比例达到90%以上,而尾段阻力占总阻力的比例趋于零.头部承受了绝大部分的阻力,在设计航行体结构时,对航行体头部强度要予以特别考虑.
图6 头部和尾段受力情况
3.4 空化器直径对水下航行体减阻特性影响
其他参数不变,航行体前段分别取较小和较大的空化器直径:d=0.25D和d=0.50D,给定不同空化数条件进行数值模拟,并与d=0.33D情况比较.如图7,为空化数为0.01时不同直径空化器航行体的空泡形态.相同空化数条件下,空化器直径越大,越容易形成空泡.在计算参数条件下,较小空化器直径的航行体,只形成局部空泡,而两直径较大空化器航行体,则形成了超空泡.
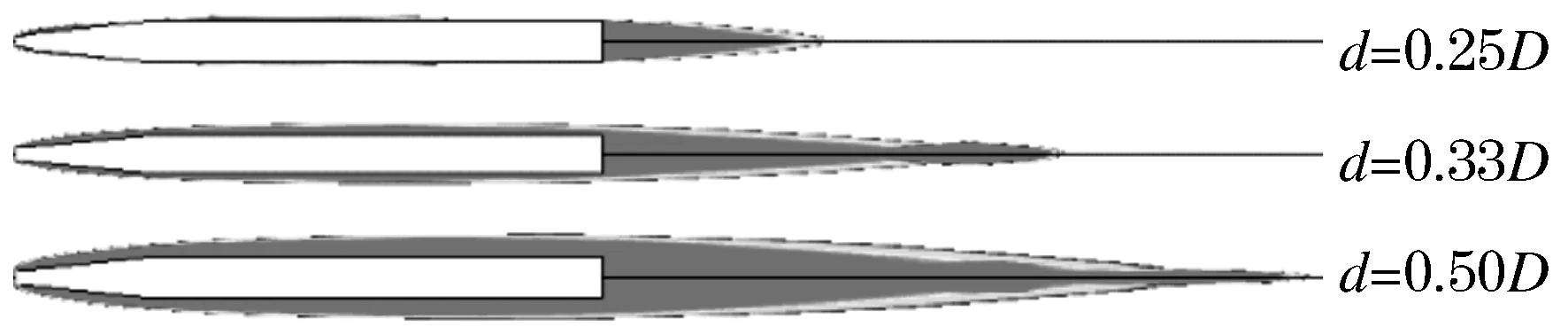
图7 不同空化器直径的空泡形态
阻力系数情况如图8.随空化数降低,航行体头部、尾部形成空泡后,各模型压差阻力系数都大幅度减小,但压差阻力系数随空化器直径增大而增大;摩擦阻力系数在空泡形成过程中迅速减小,d=0.33D、d=0.50D模型能够形成超空泡,形成超空泡后摩擦阻力系数趋近于零,d=0.25D模型不能形成超空泡,弹体仍有部分为水绕流,摩擦阻力系数是一个比较高的数值.总阻力系数在空泡形成过程中都减小,而生成超空泡后,由于d=0.50D模型压差阻力系数比较大,所以总阻力系数也最大,虽然d=0.33D模型压差阻力系数比d=0.25D模型大,但由于形成超空泡,摩擦阻力系数趋于零,比d=0.25D模型摩擦阻力系数更低,因此,总阻力系数最低.头部空化器直径增大,超空泡较易形成,但压差阻力系数增大,减阻能力降低;头部空化器直径过小,不能形成超空泡,摩擦阻力系数大,也不能有效减阻.所以要降低水下航行体阻力系数,须合理设计航行体外形结构,在能形成超空泡的条件下,航行体头部空化器直径要尽量小.

图8 不同空化器直径对阻力系数的影响
4 结 论
本文对水下航行体超空泡减阻进行了数值模拟,研究了航行体空泡形态及阻力系数的变化规律,分析了航行体的受力和减阻特性,得到了如下主要结论:
1)水下航行体在超空泡绕流时可以实现减阻.随着空泡的形成,压差阻力系数、摩擦阻力系数减小,空泡包裹住航行体的头部和尾部后压差阻力系数基本不变,形成超空泡后,摩擦阻力系数下降到基本为零,总阻力系数基本等于压差阻力系数.
2)分析了航行体的受力情况.未形成超空泡时,头部压差阻力,尾段的压差阻力、摩擦阻力都占比较大的比例,形成超空泡后,头部压差阻力所占比例增大,占到总阻力的99%以上,而尾段压差阻力和摩擦所占总阻力比例都减小并趋于零.
3)航行体头部空化器直径增大,形成超空泡容易,但减阻能力降低;空化器直径过小,不能形成超空泡,不能有效减阻.为实现大幅度减阻,在航行体能形成超空泡的情况下头部空化器尺寸要尽可能小.
[1] 傅金祝. 超空泡—对未来水中兵器系统的挑战[J]. 水雷战与舰船防护, 2002, 10(2): 18-23.
[2] 柯贵喜, 潘 光, 黄桥高, 等. 水下减阻技术研究综述[J]. 力学进展, 2009, 39(5): 546-554.
[3] 颜 开, 褚学森, 许 晟, 等. 超空泡流体动力学研究进展[J]. 船舶力学, 2006, 10(4):148-155.
[4] KUKLINSKI R, CASTANO J. Experimental study of ventilated cavities on dynamic test model[C]// California: Fourth International Symposium on Cavitation, 2001.
[5] 袁绪龙, 张宇文, 杨武刚. 高速超空化航行体典型空化器多相流CFD分析[J]. 弹箭与制导学报, 2005, 25(1): 53-59.
[6] SINGHAL A K, ATHAVALE M M, LI H Y. Mathematical basis and validation of the full cavitation model [J]. Journal of Fluids Engineering. 2002, 124: 617-624.
[7] ABRAHAM N V, JAMES S U, IVAN N K. High-speed bodies in partially cavitating axisymmetric flow [C]// Osaka: Fifth International Symposium on Cavitation, 2003.
[8] 王福军. 计算流体动力学分析 [M]. 北京: 清华大学出版社, 2004.
[9] 陈卓如. 工程流体力学[M].2版. 北京: 高等教育出版社, 2004.
[10] 石秀华. 水中兵器概论(鱼雷部分)[M]. 西安: 西北工业大学出版社, 1995.
[11] 李 颖,钱玉恒,郭 苑,等.基于XC164CS单片机的空泡压力实时监测系统[J].哈尔滨商业大学学报:自然科学版,2013,29(2):200-204.
Numerical simulation study of drag reduction of supercavity flow around underwater vehicle
JIN Da-qiao1, JIA Lin-li1, WANG Jin-ling1, GENG Rui-guang1, WANG Cong2
( 1. School of Mechanical and Electrical Engineering, Heilongjiang Institute of Technology, Harbin 150050, China;2. School of Astronautics, Harbin Institute of Technology, Harbin 150001, China)
The drag reduction characteristic of the flow around underwater vehicle is simulated based on the homogeneous equilibrium theory by using commercial CFD Code Fluent6.3. The drag coefficient change law, force condition and drag reduction characteristics of the vehicle were studied in this paper. When the supercavity forms around the vehicle, the pressure coefficient decreased, and the viscous drag coefficient almost decreased to zero. The total drag coefficient decreases greatly compared with non-cavitating flow around vehicle and the streamlined ones. The head of vehicle bears almost all of the drag, and the drag beard by the latter of vehicle decreased almost to zero. The supercavitation forms easily as the cavitator diameter increased, but the drag reduction ability of supercavitation decreased. When the cavitator diameter was too small, the supercavitation can’t form, and the drag reduction characteristic of supercavitation was ineffective.
underwater vehicle; drag reduction of supercavity; cavity shape; drag characteristic; numerical simulation
2015-02-27.
黑龙江省教育厅基金(12541676)
金大桥(1974-),男,博士,讲师,研究方向:空化与空泡动力学.
TJ67
A
1672-0946(2015)05-0609-05
猜你喜欢
中国农机化学报(2024年12期)2024-12-31 00:00:00
钢铁钒钛(2023年5期)2023-11-17 08:48:34
轴承(2022年6期)2022-06-22 08:54:52
航空发动机(2021年1期)2021-05-22 01:20:30
数字海洋与水下攻防(2021年2期)2021-05-08 08:01:26
厦门理工学院学报(2016年1期)2016-12-01 04:50:53
水利科技与经济(2016年7期)2016-04-25 13:03:00
系统工程与电子技术(2016年2期)2016-04-16 05:17:00
船海工程(2015年4期)2016-01-05 15:53:28
计算物理(2014年1期)2014-03-11 17:00:22