一种测力鞋垫系统的设计研究
2015-08-05 06:46:14李满天刘国才王鹏飞
哈尔滨商业大学学报(自然科学版) 2015年5期
李满天,段 飞,刘国才,王鹏飞
(哈尔滨工业大学机器人技术与系统国家重点实验室,哈尔滨150001)
双足机器人的控制问题是双足机器人研究中的一个重点问题,双足机器人运动过程中双足是惟一接触地面的部位,因此足底压力分布的测量对于机器人的零力矩点位置的确定以及机器人的控制具有重要意义.根据仿生学原理,可以先在人足上进行实验,从而更加有效地运用于双足机器人平台上.
1882年,英国人Beely率先开始研究压力分布测试技术[1],20世纪初足底压力分布测量研究正式开始,最早采用的是直接复印技术[2].近20年来传感及电子技术被广泛应用于足底压力的采集中,压力板测试设备采用力-电转换技术,得到了较多的研究和市场应用[3].压力板具有多个按足部结构划分的区域,每个区域对作用于其表面的压力独立记录,在压力板上站立和行走时,它可以将压力信号转化为电信号,得到精确的结果,并可方便地进行数据处理.
压力板测试设备大量地使用了电子元件,体积庞大、结构复杂、成本太高,而且存在测试空间局限性等缺陷,不利于运动范围较大的动态研究.因此,近年来,研究人员设计了嵌入鞋垫内的柔性压力传感器,包括电容式、压电式、压阻式等[4].足底压力分布测试鞋垫可以对足部与鞋之间的接触信息做出评价,并且可以连续测量足部与鞋的压力分布,不受空间限制.
1 载体双足机器人
本课题基于实验室的双足机器人项目,双足机器人作为压力分布测试鞋垫的最终载体,实体硬件部分已经加工出来并且装配完毕,目前机器人的控制系统正在研究设计过程中,机器人用于模仿人正常步行时的步态.载体机器人的关节角度满足步行、上下楼梯的需要.
机器人的主要参数是:体重约50 kg,身高约1.35 m,大致相当于一个10岁儿童的外形,踝关节离地约0.07 m,膝关节到踝关节距离约0.34 m,髋关节到膝关节距离约0.34 m,双腿正常直立时左右脚中心间距约0.15 m,踝关节角度变化范围是-20°~+45°,膝关节角度变化范围是0°~+90°,髋关节伸屈角度变化范围是-75°~+15°,髋关节展收角度变化范围是-20°~+45°.两只腿一共有8个自由度.
为了更好地使双足机器人和人足接近,双足机器人的脚板选购了奥索公司的LP万力飞毛腿®EVOTM,它可以使机器人最大程度利用脚板潜能,更好地达到自然的前进步态,能够承受较大的冲击力.脚套具有一定的弹性,和人足的外形弹性接近,因此可以选用一般的运动鞋,压力分布测量鞋垫安装于鞋内,足底各组件如图1.
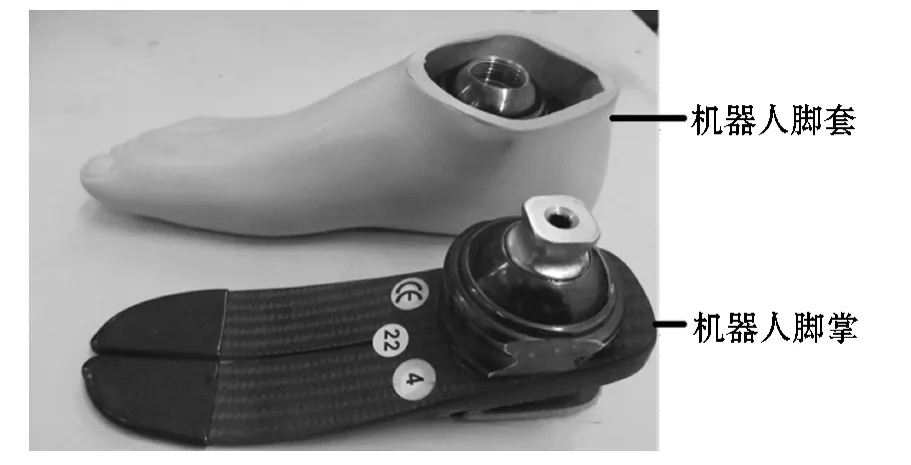
图1 足底组件
2 传感器的选择
自然步态下足底压力的实时测量要求传感器可移动,互相之间不相连,可以放在鞋底并且不影响原本的受力情况,保证在目标环境中有效[4].
作为足底压力分布测量鞋垫中的重要采集元件,传感器的选择关系到所获得的压力数据的准确性、稳定性、实时性等,因此传感器的选择是在综合考虑多种性能要求的基础上确定的.由于本实验主要研究步行状态下的足底压力分布情况,因此要求系统满足测量量程、灵敏度、测量精度、重复性好、系统轻便、不妨碍原本运动等要求.
根据人体足部生物运动力学可知,人体的步行频率是指人在行走或跑步的过程中,单位时间内两腿交换的次数.人体步行频率在1.7~2 Hz之间,正常人行走频率一般在110步/min,相当于1.8 Hz,最慢行走速度不会低于0.3 Hz,目前人类步行频率的极限不高于5Hz[5].如果需要了解整个足底压力鞋垫的受力情况,至少需要知道5~7个特征点位置的受力情况,在特征点上布置传感器,传感器布置数量越多,所获得的压力分布数据越详细准确.因此,要求单个传感器的面积不大.
通过综合考虑和评估,足底压力传感器选用了美国Tekscan Flexiforce的型号为A301的传感器,足底压力传感器选用了美国Tekscan Flexiforce传感器,Flexiforce是一种超薄和挠性印刷电路,可很方便集成多种运用.由于Flexiforce像纸一样薄的结构,可弯曲和测力特性可用来测足底压力,并且几乎不影响足底压力的分布.Flexiforce比其他薄膜测力产品有更好的线性、磁滞、飘移、温度灵敏度.选用的A301传感器有效区域是传感器末端的直径为0.95 cm 的圆,厚度是0.208 mm.
据相关资料显示,正常行走时人足与鞋垫之间最小的接触面积为200 mm2.前人实验表明,在一般平地上步行的人体,当行走速度为1.0~3.0 m/s时,足底所承受的压力最大约为自身重量的1.5倍[5],压力值会随着运动程度的加剧而增大.足部起到的作用是缓冲吸收压力,并提供向前的动力.按人体质量为75 kg计算,与地面最大接触压强为

传感器传感区域面积为
S=π ×0.4752cm2=0.71cm2
传感器能够承受的最大压强为

因此所选用的传感器量程是足够的,满足要求.
传感区域外部材料是一种聚酯薄膜,导电层用的是银,传感区域用的是一种特殊的授予专利的电阻油墨.对传感器有损伤的条件有:温度超过78℃;浸在水里(传感器的顶层和底层是用胶粘在一起的,会脱落);尖的负载;剪切的力;折压传感器;大于68.95 MPa的力.传感器是柔韧的,但传感器区域不能折,因为会有剪切力产生.导电部分可以弯曲,但一般不要超过90°,不然导电银层会断裂.
3 传感器的校准
传感器需要校准,校准在Flexiforce传感器使用时是一个非常关键的步骤;因为不同的传感器之间在出厂时会有轻微的差异,校准时的环境和实测时的环境保持一致,都可以大大提高实测时的精度,减小误差.
Flexiforce传感器的传感区域是由一种特殊的油墨电阻做成的,所施加的压力越大,传感区域的电阻阻值越小.资料显示,由于传感器本身的组成结构,一般到55 MPa左右传感器会发生塑性变形而造成损坏,根据前面计算,正常行走时人体与地面最大接触压强为5.512 5 MPa,因此不用考虑传感器发生塑性变形的可能性.传感器的寿命和多方面综合因素有关:负载大小;接触面的材料;加力的方向(剪切力会减小传感器寿命);在222.5 N的负载下进行接触力测试实验发现,100万次后,输出依然正常.传感器属于压阻型,受压后的电阻值可以通过运算放大电路放大,变成模拟信号输出.如此,传感器的分辨率可变,可以通过不同的运算放大电路和电子元件进行调节.

图2 传感器校准所用圆盘
在使用A301等传感器的时候,传感器本身是一个随着所受压力变化而变化阻值的可变电阻,F-R(负载-电阻值)关系并不是线性的,但是F-1/R(负载-电导)关系是接近于线性的,可以用最小二乘法进行线性拟合,以方便后续信号采集和处理电路的设计.资料显示,A301传感器的阻值变化范围比较大,无负载时阻值大于5 MΩ,当加到满负载时阻值约为5 kΩ.传感器在第一次使用时的输出容易变化,为了能够在校准的时候获得较好的重复性,首次校准时一般加上1.1倍负载的力再进行校准.
传感器校准即是让传感器的输出和真正的测力值之间建立对应关系,由于每一片传感器真实的所受压力和电阻值的对应关系并不完全一致,因此需要一一校准.在实际操作过程中加工了如图2所示的两块铝制圆板,每块板3.3 kg,其中下板用于支撑,靠近圆板的边上以120°的角度差均匀地打三个孔,用于放入阶梯小圆柱,把传感器用双面胶粘接于圆柱的顶端,应该保证圆柱的直径小于传感器传感区域的直径,选择打三个孔是因为能更好地保证受力的均匀,上板用于添加载荷,载荷选择实验室的哑铃,一共10个,每个2.5 kg,相当于每一个传感器曲线上能测11个点,每一个传感器所受压力为圆盘及其上重量之后的1/3,每旋转120°记一次电阻值,每一个受力状态下有三组电阻值,最后取平均值,以增强校准的精度.
在整个的校准过程中校准对象一共有63片A301传感器,所得数据有6237个.先对各个传感器进行一一标号,然后三个一组的进行标定.以1号传感器为例,图3为它的F-R(负载-电阻)曲线和F-1/R(负载-电导)曲线.
从图中可以看出F-R曲线近似于反比例函数曲线,F-1/R曲线近似于直线,可用最小二乘法原理进行拟合,这样可以求出1号传感器电导曲线的斜率k和参数b,同理其他传感器的k和b也能获得.有
图4为63个传感器的F-1/R曲线,由此可以看出大多数传感器的线性度都比较好,可以近似为直线,但是传感器的曲线斜率可能不同.
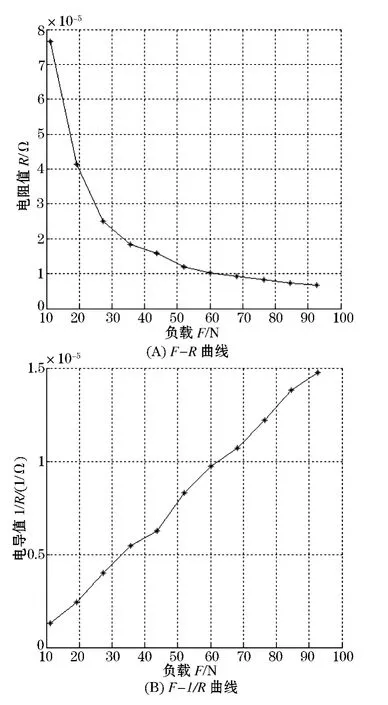
图31 号传感器F-R曲线(A)和F-1/R曲线(B)
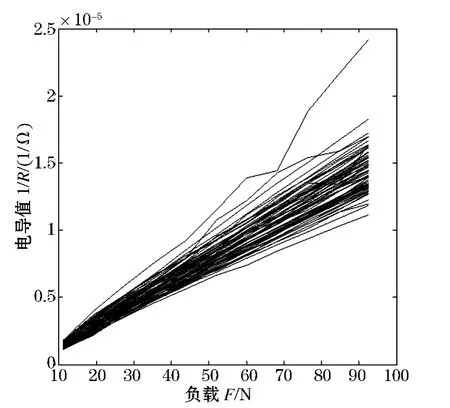
图4 63个传感器的F-1/R曲线
4 传感器的布局
足底压力分布测量鞋垫现在实验者的人足上进行实验,选择的人足鞋垫长为41码,即25.5 cm.人足不能当成是一个刚体,它是由26块骨,33个关节和多条肌肉、韧带和筋膜组成的.在运动和负重时,足部会发生不同程度的变形[6].
根据人足生物力学的研究成果,一般将人体的足底分为15个区域:足跟(区域1-3),足中段(区域4-5),跖骨(面积6-10)和足尖(区域11-15),如图5所示,这些区域支撑人体大部分的重量,调节身体平衡.因此,理想情况下,至少需要15片传感器,以求能够能全面地反应人体的重量分布.
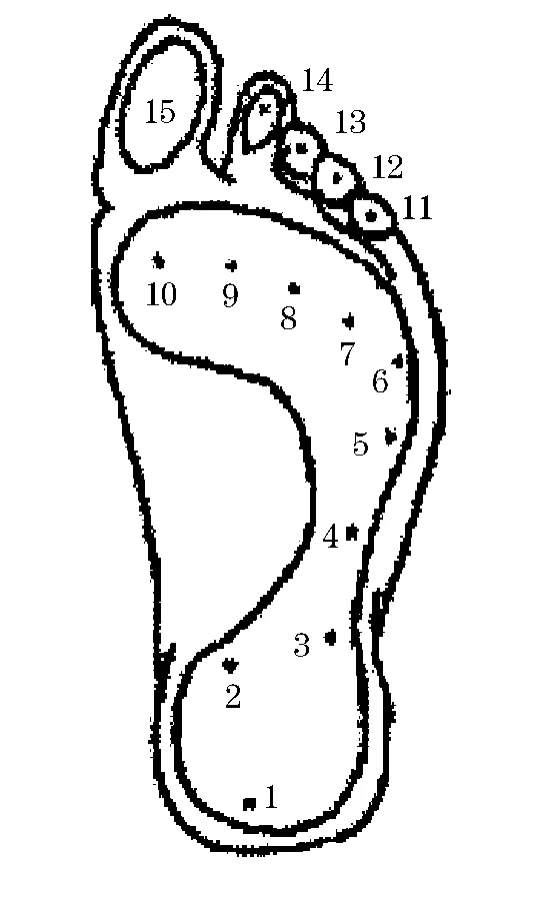
图5 人体足底区域[4]
在实际布置传感器的过程中,先在布满灰尘的平地面上放上两张A4白纸,然后实验者以正常姿态站立,左右脚分别全部位于两张白纸之上,这样可以从白纸上的灰尘印痕大致看出主要受力区域,结合人足生物力学的15个区域,为了更好地反应整个足底的压力分布,每一个鞋垫布置了20个传感器,选择的传感器都为线性度较好的,实际的布置位置如图6.
5 传感器后续硬件电路的设计
首先是要把20路的传感器的变化的电阻阻值信号转化为电压信号,由于电导值和传感器所受压力值近似为线性关系,因此经过多方权衡,放大电路选择了同相比例放大电路,如图7.其中R1表示传感器电阻,Rf表示参考电阻,UI为参考输入电压,UO为输出电压,根据同相比例放大电路原理可知
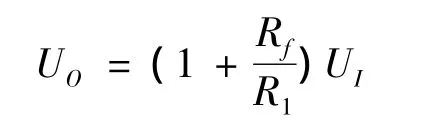
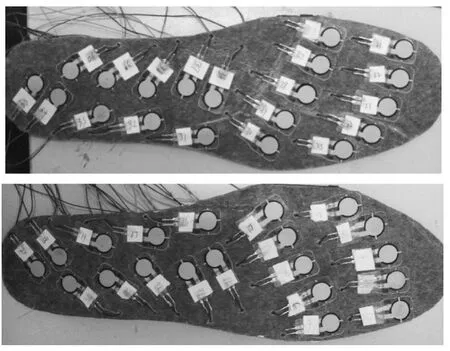
图6 左右脚传感器布置(上右下左)
由于每只鞋垫上面布了20个传感器,每个传感器都需要进行同相比例放大电路进行放大,本设计选用了ADI模拟器件公司的AD8618,它是四通道轨到轨输入与输出的单电源放大器,具有极低的失调电压、宽信号带宽以及低输入电压和电源噪声.它采用了专利的微调技术,达到较高的精度,无需激光调整.AD8618支持2.7 V~5 V的单电源供电.
AD8618的输出是模拟电压,需要进行模数转换,模数转换需要一定的精度和速度,每只压力鞋垫有20路模拟电压的输出.为了提高压力传感器的集成度,减小整个处理电路的体积,本设计选用了集成了模数转换和串口通信功能的C8051F226单片机,它是完全集成的混合信号系统级MCU芯片,有真正的8为多通道ADC,有与8051兼容的微控制器内核和8 K字节的FLASH存储器;此外还有硬件实现的UART和SPI串行接口;它的32个通用I/O引脚中每一个端口引脚都可以被配置为ADC的模拟输入.最大CPU速度为25 MIPS,有着256字节的SPAM,另外还有1 024字节的RAM.ADC最大速度为100 ks/s,选择的封装形式为48TQFP.
电路板通过PC机的USB口供电,USB输出电压为5 V,通过正向低压降稳压器AMS1117-3.3稳压到3.3 V,具有1%的精度,AMS1117的内部集成了限流和过热保护电路.
模数转换的时候有一个基准电压VREF,VREF必须大于1V并小于(VDD-0.3)V,VDD是 AMS1117的输出端,VDD的电压会波动,查AMS1117的特性可知AMS1117的输出电压不会低于3.2V,因此VDD -0.3 不会低于2.9 V,保留0.1 V 的安全余量,VREF设定为2.8 V.另外,为了提高对于传感器电阻值变化的分辨率,同相比例放大电路中的同相端电压选择为0.1 V.这个2.8 V电压和0.1 V电压都由TL431来获取.
TL431是三端可调分流稳压器,拥有超过指定的热稳定性,适用汽车、商业和军用温度范围.输出电压可以设置为2.5~36 V之间的任意值.它有一个0.2 Ω的典型输出阻抗.在选择电阻时必须保证TL431工作的必要条件,就是通过阴极的电流要大于1 mA.
C8051F226的ADC子系统包括一个可配置模拟多路开关(AMUX),一个可编程增益放大器(PGA)和一个100 ks/s、8位分辨率的逐次逼近寄存器型ADC,ADC中集成了跟踪保持电路和可编程窗口检测器.
6 系统的软件设计
C8051F226选择的ADC是8位的,在ADC初始化中设置参考电压(2.8 V)为ADC转换电压的最大值,因此AD转换电压分辨率为
图8为软件流程图,C8051F226中任何一个引脚都可以被配置为数字I/O,缺省方式是数字I/O.P0MODE、P1MODE、P2MODE和 P3MODE 这 3个特殊功能寄存器可以将端口引脚配置为数字或模拟方式.C8051有 P0、P1、P2、P3 一共4 个端口,一共有32个端口引脚.P0.0和P0.1用于串口发送和接收,还剩下30个可用引脚.因为鞋垫中传感器数量为20个,从中选出20个引脚作为ADC模拟输入,需要注意的是清楚地知道各个位置的传感器和端口的对应关系.
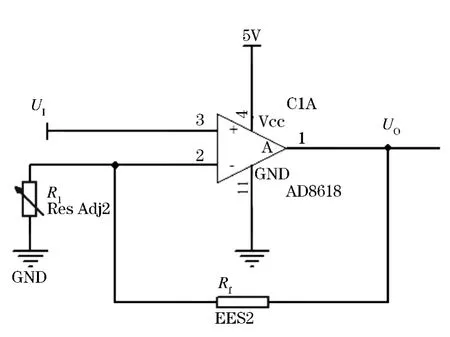
图7 同相比例放大电路
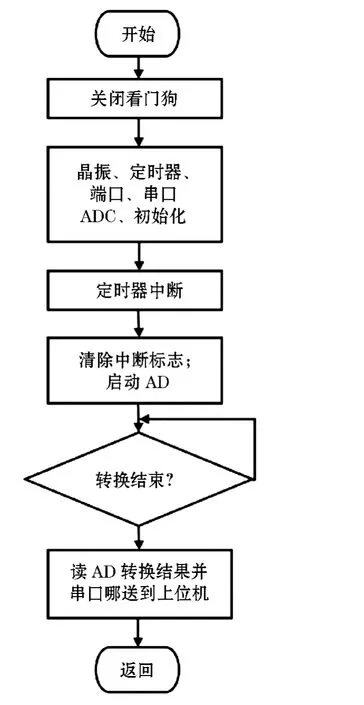
图8 软件流程图
7 实验
对于每一只鞋垫,一共有20个传感器,40个管脚,所以一共引出了40根导线.其中每一个传感器的其中一端连接在一起作为共地端,另外一端分别接往AD8618运算放大器的反相端,从鞋垫引线到主电路板中间用到了FPC连接器,它有着高密集成、节省空间、连线简单、柔性可折叠等特点.整个足底压力分布测量鞋垫系统的外观如图9.

图9 足底压力分布测量鞋垫系统外观图
左脚的传感器编号为1~20,右脚的传感器21~40号,这个编号和前面的传感器标定时的编号一致.针对其中的33号传感器间断地加力,通过串口传输得到0x13、0x35、0x6E、0x94、0xE2 一共 5 个值,通过换算得到电压值,最终得到压力值.对应关系为表1数据所示.同理,其他的多路传感器也可以根据串口输出获得其对应的压力值.
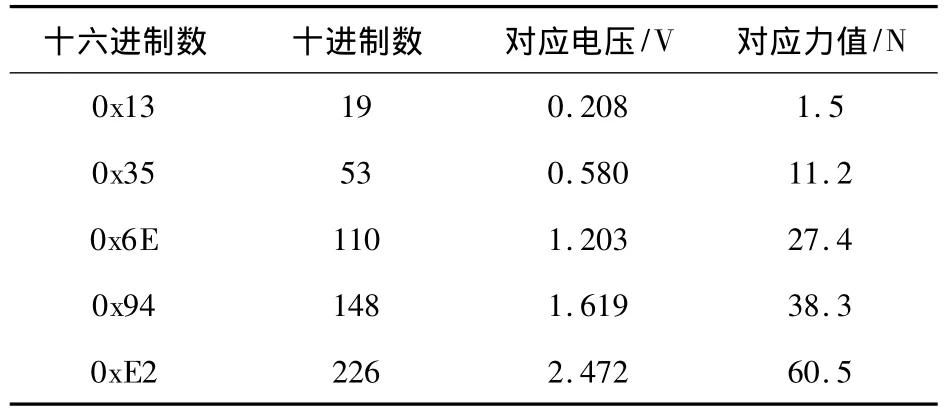
表1 33号传感器实验数据表
在本实验中,最终可以获得某个时刻左脚或者右脚压力鞋垫的20路传感器所受压力值.在鞋垫表面建立固定于其上的XYZ直角坐标系,XOY平面建立在鞋垫表面,Z轴垂直于鞋垫面.在平地行走时,可以认为除了Z方向上的力和力矩外,其他方向上的分量为零.当配置N个一维力传感器时,ZMP位置可求得如下:
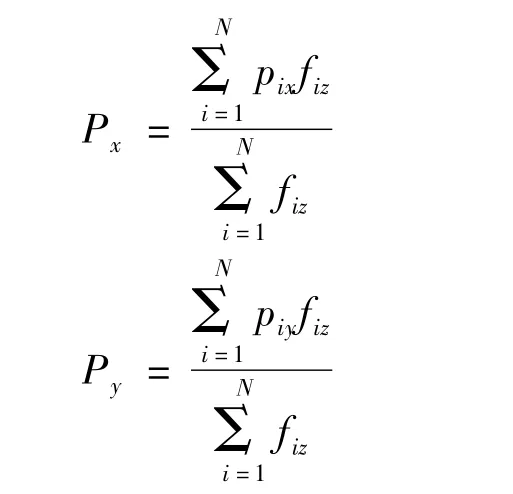
其中:px、py表示ZMP点的横纵坐标,N表示一维力传感器的数量,pix、piy分别表示第i个传感器的横纵坐标,fiz表示第i个传感器的Z方向的压力值大小.根据所测得的压力值和ZMP计算公式,最终可以求得ZMP的位置.
8 结语
本文以 Tekscan Flexiforce A301传感器和C8051单片机为核心,研制成功一种用于测量足底压力分布的鞋垫.通过实验,证明该鞋垫能够采集人体足底的压力值,并且能够根据所测得的压力值求解得到ZMP的位置点.这为小型仿人机器人ZMP点的获取提供了一个行之有效的方法,可为仿人机器人的控制提供重要作用.
[1]MASTERS R S W,MACMAHON K M,PALL H S.Implicit motor learning in Parkinson's disease [J].Rehab Psychol,2004,49:79-82.
[2]王冠华.用于足部运动力学测试的PVDF生物力学传感器系统研[D].昆明:昆明理工大学,2008.
[3]GOUWANDA D,SENANAYAKE S M N A,MARASINGHE M M D R,et al.Real time force sensing mat for human gait analysis[J].Proceedings of the World Academy of Science Engineeting and Technology,2008:26-31.
[4]A R ABDULl HADI,ZAYEGH A,BEGG R K,et al.Foot Plantar Pressure Measurement System:A Review [J].Sensors,2012,12:9884-9912.
[5]金 曼,丁 辛,甘以明,等.足底压力分布测量鞋垫的研制[J].纺织学报,2010(9):114-117.
[6]魏鹏绪.足部生物力学与人体亚健康[C]//厦门:中华中医药学会、中和亚健康服务中心、日本中医药普及协会,2011.
猜你喜欢
初中生学习指导·中考版(2022年4期)2022-05-12 00:12:51
农业知识(2021年5期)2021-04-06 12:34:10
中学生数理化·中考版(2019年10期)2019-11-25 09:39:06
电子制作(2019年24期)2019-02-23 13:22:20
电子制作(2018年17期)2018-09-28 01:56:44
消防界(电子版)(2018年17期)2018-02-18 11:55:15
故事作文·高年级(2016年11期)2016-11-28 14:54:34
少儿科学周刊·少年版(2015年4期)2015-07-07 21:13:44
少儿科学周刊·少年版(2015年4期)2015-07-07 21:09:31
少儿科学周刊·少年版(2015年4期)2015-07-07 21:08:08