
一种提取遥感影像中道路信息的方法
2015-03-09 11:27李华胜黄平平苏莹
自然资源遥感 2015年2期
李华胜, 黄平平, 苏莹
(内蒙古工业大学信息工程学院,呼和浩特 010080)
一种提取遥感影像中道路信息的方法
李华胜, 黄平平, 苏莹
(内蒙古工业大学信息工程学院,呼和浩特 010080)
由于合理有效地选择分割阈值较难,因此基于阈值分割的道路信息提取方法对于遥感影像中含有多种类型道路、或非道路地物干扰比较明显的情况适用性不理想。为此,提出了一种将Mean Shift和阈值分割相结合的方法来提取道路信息。首先,采用Mean Shift方法对遥感影像进行平滑处理,在较好地保持道路边缘信息的同时使道路内部的纹理分布更加均匀;其次,对平滑处理后的影像进行Mean Shift分割处理,将具有相同或相似灰度值的道路用一种灰度值显示;然后,选择灰度直方图中像素数量值高的线所对应的灰度值作为分割区间边界点进行多阈值分割,得到初始道路信息;最后,对初始道路信息进行后处理,得到最终的道路信息。实验证明,该方法可以完成对遥感影像中道路信息的提取,拓宽了阈值分割方法提取道路信息的使用范围。
多种类型道路;信息提取;Mean Shift;阈值分割
0 引言
随着遥感影像分辨率的提高,影像中的地物信息越来越丰富。近年来,基于遥感影像提取道路信息的方法研究主要有:周安发等[1]运用改进的区域分割方法实现了道路信息的提取,但该方法只能够实现对主干道路的提取;周家香等[2]首先采用Mean Shift分割方法进行道路分割,然后运用形状因子和多方向形态学滤波去除干扰区域,实现了道路信息的提取,但该方法在其结果验证中采用的数据道路类型比较单一,缺少对含有多种类型道路信息的验证;蔡虹玥等[3]运用改进的分水岭分割算法提取道路基本信息,运用面向对象的方法实现了道路信息的提取,但该方法提取的道路有间断现象,导致道路的完整性不佳,同时,该方法将不同类型的道路进行整体提取,没有考虑将不同类型道路进行分类提取;曾发明等[4]采用Canny算子进行边缘检测和匹配来提取矿区道路信息,但受复杂地物环境的干扰,道路的提取结果不理想。由于遥感影像中存在异物同谱现象,使得采用同一种方法提取多种类型的道路变得局限,因此,将多种方法相结合变得更加可行。如张雷雨等[5]提出一种结合均值漂移分割和利用统计面积去除与合并小区域的方法实现了道路信息的提取,但验证该方法所用数据中的道路信息特征明显且类型单一。鉴于此,本文根据影像中道路色调的不同,同时辅助以道路的长度、宽度和连接性等信息来初步划分道路类型;根据原始影像经过Mean Shift平滑和分割处理之后的灰度直方图具有的一些特征,采用多阈值分割的方法分割出不同类型道路的初始信息,然后经过后处理得到最终的道路信息,实验证明,该方法可以实现对遥感影像中道路信息的提取。
1 Mean Shift算法的基本原理
Mean Shift的概念是由Fukunaga[6]等人于1975年在一篇关于概率密度梯度函数估计的文章中提出的;Cheng[7]于1995年在其文章中定义了核函数和权重系数,扩大了Mean Shift的适用范围;后来,Comaniciu[8-11]等人将Mean Shift算法应用于图像平滑和分割中。
Mean Shift算法是一种迭代算法,它使局部每个点都指向概率密度增加最大的方向,算法的基本原理为:
定义d维空间Rd的样本集合{xi},i=1,…,n; 空间的核函数K(x)=k(‖x‖2),其中k(x)为核函数K(x)的剖面函数,满足非负、非增和分段连续。令h为窗口半径,则在点x处的多变量核密度估计为
(1)

(2)
令g(x)=-k′(x)为k(x)的负导函数,由g(x)导出新的核函数G(x)=g(‖x‖2),将g(x)和G(x)代入式(2)并变形得
(3)
式(3)中,等号右面第二个中括号中的内容表示Mean Shift向量,括号中的第一项为Mean Shift的迭代公式。Mean Shift算法的过程为:
给定一个初始点x,核函数G(x),容许误差ε,通过迭代方法不断地沿着概率密度的梯度方向移动,最终收敛到数据空间中密度的峰值。迭代时的步长与梯度大小和该点的概率密度有关,是一个变步长的梯度上升算法。
本文所用的Mean Shift图像平滑与分割的基本原理为:一幅图像可以表示成一个二维网格点上p维向量[12-14],由图像的空间和色彩(或灰度等)信息组成一个p+2维的向量x=(xs,sr),其中xs表示网格点的坐标,xr表示该网格点上p维向量特征。
用核函数Khs,hr来估计x的分布Khs,hr具有如下形式,即
(4)
式中:hs和hr为控制平滑解析度的参数;C为归一化常数。在实际操作中,参数hs和hr可以根据解析度的要求直接给定。
平滑算法[7]总是沿着像素梯度最大的方向扫描,当扫描到图像边界,即像素梯度最小时,停止扫描。该算法的优点在于能在去除图像噪声的同时较好地保持图像的边缘信息。
Mean Shift分割与平滑类似,只需要把收敛到同一点的起始点归为一类,然后把这一类的标号赋给这些起始点。在图像分割中,有时还需要把包含像素点太少的类去掉。本文经过Mean Shift分割处理之后,被分割成连续区域部分的像素灰度值为该区域内灰度值的均值。
2 阈值分割
本文采用对原图像进行Mean Shift平滑和分割处理之后的图像进行阈值分割处理。
将经过Mean Shift分割处理之后的灰度图像表示为f(x,y),其相应的灰度值区间为[0,255],令Ti和Tk为选择的分割阈值,其中Ti,Tk∈[0,255]且Ti≤Tk,则本文中的阈值分割方法可表示为
(5)
式中g(x,y)为分割处理后得到的二值图像。
3 方法应用
实验所用的影像数据取自分辨率为0.61 m的多光谱遥感影像,实现的软件环境为MATLAB7.11.0 R2010b。具体流程如图1所示。
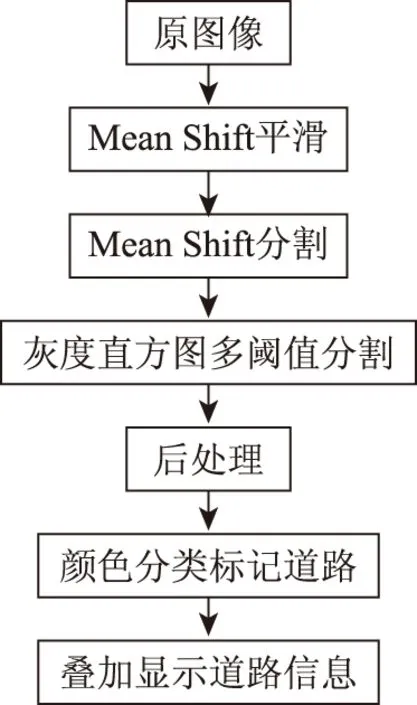
图1 道路信息提取流程Fig.1 Flow chart of road information extraction
实验所用的数据大小为573像元×938像元,原图像及其灰度图像如图2所示。

(a) 原图像 (b) 灰度图像
图2 原始遥感图像及其灰度图像
Fig.2 Original remote sensing image and its grayscale image
在方法的实现过程中,结合文献[15]提及的高分辨率影像中道路的几何、光谱特征,主要根据影像中道路色调信息的差别来划分道路。本文所划分的不同色调道路类型的标号如图2(a)所示。
3.1 Mean Shift平滑与分割

平滑处理采用多选取优的参数选择方法,最终选择的参数为(hr,hs)=(10,7),平滑处理结果如图3(a)所示。
(a) 平滑图像 (b) 分割图像
图3 Mean Shift平滑与分割图像
Fig.3 Mean Shift smooth and segmentation images
从图3(a)可以看出,平滑后图像中草地和道路的纹理变得均匀,这有利于在Mean Shift分割处理后得到更完整的道路分割结果,减少孔洞和间断现象;同时平滑处理能较好地保持道路的边缘信息。
Mean Shift分割是通过改变分割阈值参数的值来实现的。通过多选取优的方法,最终选择的分割阈值为4,得到的结果如图3(b)所示。
从图3(b)可以看出,色调信息不同的道路经过Mean Shift分割后具有比较明显的色调差别,如图3(b)中白色线标记所示。
将原始灰度图像的直方图与平滑和分割处理之后的直方图灰度进行对比显示,如图4所示。
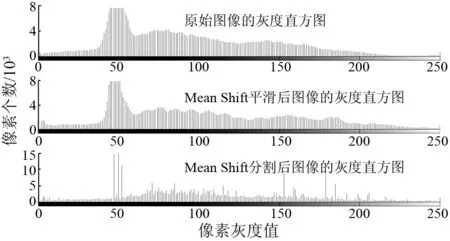
图4 图像的灰度直方图Fig.4 Grayscale histograms of images
图4(中)表明,平滑处理使图像的纹理变得均匀;图4(下)上较长的线表明,图像经分割处理后,具有相同或相似色调信息地物的像素灰度值变得相同,灰度直方图中的某个灰度值像素点的个数增多,其他灰度值像素点的个数减少。
3.2 道路信息提取与结果分析
由图3(b)的分割结果可以推断,在灰度直方图中,垂直横坐标轴的2条较长的线所对应的灰度值之间可能只含有1种道路类型,假设该推断成立,则可以选择2条线所对应的灰度值作为阈值分割区间的端点值。
如图4(下)所示,选择2条相邻且较长的线所对应的灰度值作为阈值分割图像,选择的方法为多选取优,具体的实现过程为:
1)设定像素个数最低值的选择区间(图中为[2 000,4 000]),如图5所示;设定一个区间递减的阈值(本文选择300)。
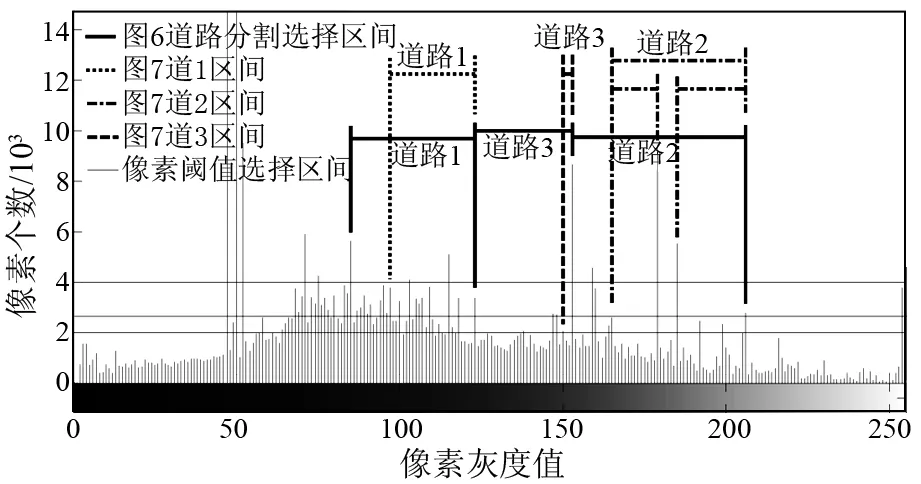
图5 道路分割阈值区间标记图Fig.5 Mark figure of road segmentation threshold range
2)改变区间像素最高处的值(首次选择为4 000),在其改变的点处选择超过其值的线所对应的灰度值作为分割的备选阈值点。
3)从备选阈值中选定灰度值最小的点作为阈值区间左端点,选择与左端点临近的点作为区间的右端点,进行分割处理;保持左端点不变,选择下一个备选阈值作为右端点,进行分割处理;再次将左端点后移1位,依次选择其后的阈值作为右端点,进行分割处理。
4)用区间最高值减去一个递减阈值后的值作为新的最高处的值,重复步骤2)和3),直到阈值小于区间的最小阈值(2 000)为止。
5)将所有结果进行对比,选择3幅包含1种色调道路信息较多,其他色调道路信息较少的图像(图6)进行对比。

(a) 道路1选择结果 (b) 道路2选择结果(c) 道路3选择结果
图6 阈值分割道路选择结果
Fig.6 Choose results of threshold segment road
由图6可以看出,根据色调等信息定义的道路类型基本被分割出来。3种不同色调道路分割阈值区间分别为[84,123],[154,206]和[123,153],如图5所示。
图5和图6所显示的结果证明了最初的假设是可行的,即原始图像经过Mean Shift平滑与分割处理之后,图像的灰度直方图中2条相邻较长的线所对应的灰度值区间中只含有1种色调道路,所以不同色调道路的分割区间可以根据此原则进行选择。
根据图5中黑色粗线所划定的道路分割范围,在不影响道路整体提取质量的同时考虑最大化地减少干扰,将分割区间适当缩小,最终选择的阈值区间分别为[97,153],[165,206]和[150,153],如图5所示,其分割结果如图7所示。

(a) 缩小分割区间的道路1(b) 缩小分割区间的道路2 (c) 缩小分割区间的道路3
图7 缩小分割阈值区间后的分割结果
Fig.7 Results after shrink segmentation threshold range
在道路2分割区间的选择中,为了减少后处理过程,将区间分成2部分来提取,滤掉中间2条黑色虚线之间的区间。因此认为,用Mean Shift平滑和分割后的图像灰度直方图中较长线所对应的灰度值作为分割阈值是可行的,且能提高阈值选择的速度。
为了和本文方法进行对比,本研究又采用直接阈值分割的方法(图8,9)和将FCM聚类与阈值分割相结合的方法(图10,11)提取道路信息。

(a) 直接阈值分割提取的道路1 (b) 直接阈值分割提取的道路2(c) 直接阈值分割提取的道路3
图8 采用直接阈值分割得到的结果
Fig.8 Results of use threshold segmentation directly
从图8可以看出:图8(a)和图8(c)上的道路受非道路信息的干扰较多,如图8(a)(b)(c)上矩形框所标示;图8(b)上矩形框内显示的是道路3的一部分。图8中的3种不同类型道路所选择的分割区间分别为[92,132],[143,206]和[119,158]。各自的区间标记如图9所示。
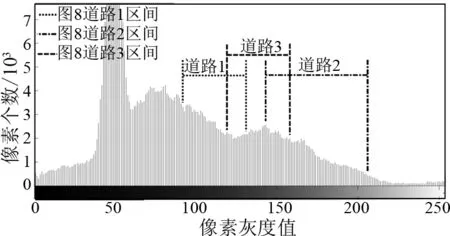
图9 采用直接阈值分割选择的区间标记图Fig.9 Choose range mark figure of use threshold segmentation directly
由图9可以看出,道路3区间与道路1和道路2的区间有交叠,要想在原图像中选择出这3个分割区间比较困难且工作量较大。
采用模糊C均值聚类(FCM)与分割方法的处理结果如图10(a)所示。从图10可以看出,道路被分成了2种灰度值,其标号如图中黑色线所标注。

(a) FCM聚类结果(b) 阈值分割道路1结果 (c) 阈值分割道路2结果
图10 采用FCM聚类与阈值分割得到的结果
Fig.10 Result images of use FCM clustering and threshold segmentation
根据FCM聚类后的直方图进行阈值分割得到的结果如图10(b)(c)所示。直方图的阈值选择区间如图11所示。
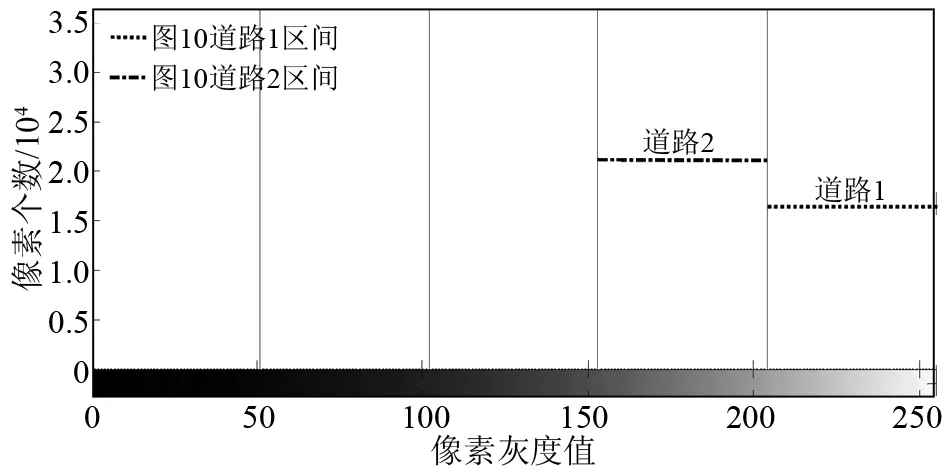
图11 采用FCM聚类与阈值分割选择的区间标记图Fig.11 Choose range mark figure of use FCM
从图10可得出,图10(b)与图7(a)对应的结果相近,但也存在如图中矩形框中所标记的少部分干扰;图10(c)所受的干扰比图7(b)的要严重,这些干扰需要采用更多的后处理操作方法去除,致使方法的整体提取效率降低。
本文方法在实现过程中采用的后处理操作有面积阈值滤波、形态学开运算、孔洞填充、图像求差与求和等操作,其中面积阈值滤波选择的阈值是通过将图像中各个独立区域进行面积区域标记后与要滤除的区域面积进行对比所得。其具体过程为:对道路1分别用阈值1 800和2 000进行面积滤波,滤除非道路信息的干扰;将2个滤波后的图像相减得到长度较短的道路段;将经过阈值为2 000滤波之后的图像再进行阈值为6 000的滤波,得到长度较长的2条道路段;最后将2次得到的道路段相加并进行孔洞填充处理。对道路2用阈值8 000滤除干扰。对道路3选择阈值700来滤除部分干扰;选择7像元×1像元的矩形结构元素进行形态学开运算处理,以断开道路与空地的连接;选择阈值3 000进行面积滤波处理;最后将2次滤波后的图像相减。
将3种方法得到的道路1,2和3分别用红色、绿色和品红色表示,相加后叠加到原图像上,其结果如图12和表1所示。

(a) 原图像 (b) 本文方法提取结果(c) 直接阈值分割提取结果(d) FCM和阈值分割提取结果
图12 原图像和采用3种方法提取道路的最终结果
Fig.12 Original image and road extraction final results of useing three methods
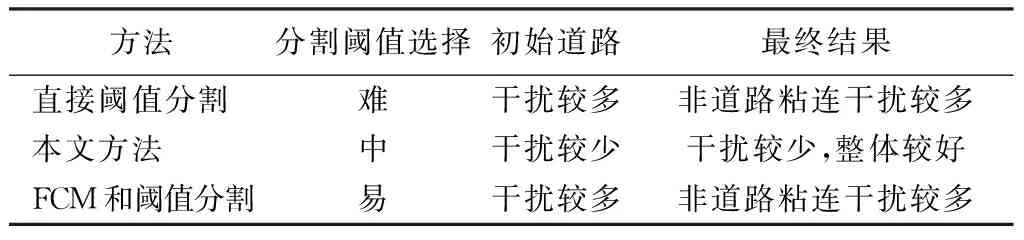
表1 3种方法的提取效果对比Tab.1 Three methods contrast table
通过表1可知,本文的方法虽然在分割阈值的选择上不如FCM方法容易,但是提取道路的最终结果所受干扰较少,连通性比较好。
将本文方法应用于其他影像数据,其提取结果如图13所示。

(a) 数据1原图像(b) 数据1道路提取结果 (c) 数据2原图像(d) 数据2道路提取结果
图13 数据1和数据2的原图像和道路提取结果
Fig.13 Original images and road extraction results of data one and data two
从图13可以得出:本文方法对如图13(c)所示的地物比较简单、干扰较少的图像提取效果较好,可以准确地提取出道路信息;对如图13(a)所示的地物比较复杂、存在不规则道路的图像也能够有一定的提取效果。
4 结论
采用Mean Shift平滑与分割算法和阈值分割相结合的方法提取遥感影像中的道路信息,在一定程度上克服了由于影像灰度直方图特征不明显而导致的阈值分割区间选择困难的问题。经过Mean Shift平滑和分割处理之后的图像灰度直方图具有比较明显的特征,使得在此基础上采用阈值分割方法分割出道路信息变得相对容易,提高了阈值分割过程中分割阈值区间选择的速度;同时在已定的道路分割阈值范围中可以进一步地将分割区间进行缩小,进而更加准确地分割出道路信息,减少道路提取过程中的工作量,拓宽使用阈值分割方法提取道路信息的使用范围。
本文方法仍有待改进之处,如在道路的分类判断上,要想得到更好的道路分类结果,不能仅靠影像中道路的色调和长、宽等特征,需要考虑更多的特征;在Mean Shift算法运用的参数选择上,如何快速有效地选择参数,以减少算法处理过程的工作量;对提取的道路如何进行有效地评价也需要进一步研究。
[1] 周安发,周家香.一种高分辨率遥感影像道路信息提取方法[J].遥感技术与应用,2012,27(1):94-99. Zhou A F,Zhou J X.A Methodology for road extraction from high resolution remote sensing images[J].Remote Sensing Technology and Application,2012,27(1):94-99.
[2] 周家香,周安发,陶超,等.一种高分辨率遥感影像城区道路网提取方法[J].中南大学学报:自然科学版,2013,44(6):2385-2391. Zhou J X,Zhou A F,Tao C,et al.A methodology for urban roads network extraction from high resolution remote sensing imagery[J].Journal of Central South University:Science and Technology,2013,44(6):2385-2391.
[3] 蔡红玥,姚国清.基于分水岭算法的高分遥感图像道路提取优化方法[J].国土资源遥感,2013,25(3):25-29.doi:10.6046/gtzyyg.2013.03.05. Cai H Y,Yao G Q.Optimized method for road extraction from high resolution remote sensing image based on watershed algorithm[J].Remote Sensing for Land and Resources,2013,25(3):25-29.doi:10.6046/gtzyyg.2013.03.05.
[4] 曾发明,杨波,吴德文,等.基于Canny边缘检测算子的矿区道路提取[J].国土资源遥感,2013,25(4):72-78.doi:10.6046/gtzyyg.2013.04.12. Zeng F M,Yang B,Wu D W,et al.Extraction of roads in mining area based on Canny edge detection operator[J].Remote Sensing for Land and Resources,2013,25(4):72-78.doi:10.6046/gtzyyg.2013.04.12.
[5] 张雷雨,邵永社,杨毅,等.基于改进的Mean Shift方法的高分辨率遥感影像道路提取[J].遥感信息,2010(4):3-7. Zhang L Y,Shao Y S,Yang Y,et al.Road extraction from high resolution remote sensing images based on the improved mean shift algorithm method[J].Remote Sensing Information,2010(4):3-7.
[6] Fukunaga K,Hostetler L.The estimation of the gradient of a density function,with applications in pattern recognition[J].IEEE Transactions on Information Theory,1975,21(1):32-40.
[7] Cheng Y Z.Mean Shift,Mode Seeking,and Clustering[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,1995,17(8):790-799.
[8] Comaniciu D,Meer P.Robust analysis of feature spaces:Color image segmentation[C]//IEEE Computer Society Conference on Computer Vision and Pattern Recognition.New York:IEEE,1997:750-755.
[9] Comaniciu D,Ramesh V,Meer P.The variable bandwidth mean shift and data-driven scale selection[C]//IEEE International Conference on Computer Vision.New York:IEEE,2001(1):438-445.
[10]Comaniciu D,Meer P.Mean shift:A robust approach toward feature space analysis[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2002,24(5):603-619.
[11]Comaniciu D.An algorithm for data-driven bandwidth selection[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2003,25(2):281-288.
[12]蒋菱.基于迭代均值漂移滤波图像分割新算法[J].微电子学与计算机,2011,28(9):147-150. Jiang L.Image segmentation based on the mean shift smoothing filter algorithm[J].Microelectronics & Computer,2011,28(9):147-150.
[13]廖建勇,郭斯羽,黄梓效.基于Mean Shift聚类的最大熵图像分割方法[J].计算机仿真,2009,26(9):187-222. Liao J Y,Guo S Y,Huang Z X.A maximum entropy segmentation method based on mean shift clustering[J].Computer Simulation,2009,26(9):187-222.
[14]高秀娟.图像分割的理论、方法及应用[D].长春:吉林大学,2006:3-7. Gao X J.The Theories,Methods and Applications of Image Segmentation[D].Changchun:Jilin University,2006:3-7.
[15]吴亮,胡云安.遥感图像自动道路提取方法综述[J].自动化学报,2010,36(7):912-922. Wu L,Hu Y A.A survey of automatic road extraction from remote sensing images[J].Acta Automatica Sinica,2010,36(7):912-922.
(责任编辑:刁淑娟)
A method for road extraction from remote sensing imagery
LI Huasheng,HUANG Pingping,SU Ying
(CollegeofInformationEngineering,InnerMongoliaUniversityofTechnology,Hohhot010080,China)
Because the choice of the reasonable and effective threshold of segmentation is rather difficult,the method based on threshold segmentation is not applicable to extracting road information from remote sensing images in that there are obviously multiple types of road and non-road feature interference. To tackle this problem,the authors propose in this paper a method which combines Mean Shift algorithm with threshold segmentation to extract road information. Firstly,the Mean Shift is used to smooth the image,then the texture distribution is made more uniform in the road and the edge of the road is kept. Secondly,the Mean Shift segmentation is used to segment the image,and group the roads which have the same or similar gray values into one gray value showing. Thirdly,as different kinds of color information of the road have different showing characteristics in the gray-level histogram,the gray value which has relatively more numbers of picture elements is taken as the segment range boundary point to obtain the original road information by using multi-threshold segmentation. Finally,post-processing of the original road information is made to obtain the road. The experiment results indicate that this method can extract the road information from the remote sensing imagery and broaden the scope of the use of the threshold segmentation to extract the road information.
various types of roads; information extraction; Mean Shift; threshold segmentation
2014-07-09;
2014-11-13
“内蒙古自治区高等学校青年科技英才支持计划资助”项目(编号:NJYT-14-B09)。
10.6046/gtzyyg.2015.02.09
李华胜,黄平平,苏莹.一种提取遥感影像中道路信息的方法[J].国土资源遥感,2015,27(2):56-62.(Li H S,Huang P P,Su Y.A method for road extraction from remote sensing imagery[J].Remote Sensing for Land and Resources,2015,27(2):56-62.)
TP 79
A
1001-070X(2015)02-0056-07
李华胜(1987-),男,硕士研究生,主要从事遥感影像处理方面的研究。Email:lihuasheng1987@163.com。
猜你喜欢
中学生数理化·八年级物理人教版(2022年9期)2022-10-24
湘潭大学自然科学学报(2022年2期)2022-07-28
北京航空航天大学学报(2022年6期)2022-07-02
天津医科大学学报(2021年1期)2021-01-26
安徽电子信息职业技术学院学报(2020年5期)2020-11-13
中国外汇(2019年13期)2019-10-10
摄影之友(影像视觉)(2018年12期)2019-01-28
自动化学报(2017年5期)2017-05-14
初中生世界·八年级(2017年3期)2017-03-24
北京信息科技大学学报(自然科学版)(2016年6期)2016-02-27
