插电式并联混合动力汽车模糊控制策略设计与仿真
2015-03-07 09:24:50尹安东王若飞
合肥工业大学学报(自然科学版) 2015年9期
程 飞, 赵 韩, 尹安东, 王若飞
(1.合肥工业大学 机械与汽车工程学院,安徽 合肥 230009;2.奇瑞新能源汽车技术有限公司,安徽 芜湖 241002)
近年来,插电式混合动力汽车(plug-in hybrid electric vehicle,PHEV)因可以使用外接电网充电、纯电动行驶里程长、节油率高,成为许多国家新一代电动汽车发展规划中实现车辆节能减排的重要技术途径之一[1]。从当前国内外的混合动力汽车研究发展现状来看,PHEV的研发在国内外刚刚起步,差距不大。日本、美国、德国、法国等国家的车企已经推出了自己的PHEV。在基础设施及电池技术还没有完全解决的前提下,国内各大汽车厂商把PHEV作为一个重点研究方向,上汽、一汽、长安等公司都在研发自己的PHEV,并且一些车型已经上市。PHEV属于混合动力汽车(HEV)范畴,但又区别于传统HEV,它不但具有传统HEV汽车的优点,而且可以通过外部电网对动力电池进行充电,进一步降低了对燃油的依赖,经济性更好。然而,由于动力总成结构以及工作模式的复杂性,PHEV需要一套严密的控制策略以解决汽车行驶中如何根据行驶工况的不同来完成不同动力源之间的能量分配问题,保证各动力元件在最佳工作区域工作,提高整车的经济性和排放性[2]。由于模糊控制更接近人的思维方式,具有构造方便、良好的鲁棒性、适应性强以及对参数不敏感等优点,适合作为PHEV的控制策略[3]。
1 PHEV的工作模式
PHEV的能量管理策略不同于传统混合动力汽车,需要寻求一种适合PHEV的能量管理策略以充分发挥其节省燃油和降低排放的优势。由于PHEV可以外接电源,具有较长的纯电动行驶里程,这决定了PHEV与普通混合动力汽车在工作模式上的不同。PHEV动力电池的工作模式主要包括电量消耗(CD)模式以及电量维持(CS)模式[4]。电量消耗模式又可分为纯电动模式和混合动力模式。其中,在混合动力模式中,考虑到PHEV动力电池容量较大的特点,一般会选择电机为主导的控制策略[5],此时,电机提供整车需求功率的主要部分,不足的部分由发动机提供。在电量维持模式中,PHEV的工作模式和控制策略与传统混合动力汽车相似,电机和发动机联合工作,使SOC保持在某一水平上,此时,发动机作为主要动力源,电机作为辅助动力源。同时为了防止动力电池过度放电,当SOC低于某一规定的值(最低门限值)时,发动机在满足整车所需功率的同时又要为动力电池充电。
2 模糊控制策略
2.1 模糊控制策略的基本原理
模糊控制策略的目标是在满足整车动力性能的前提下,在2种车载动力源(内燃机和电动机)的工作模式可随时改变的情况下,协调发动机和电动机之间的能量分配,从而提高整车的经济性和排放性能。基于PHEV具有较大动力电池容量的特点,控制策略的设计应保证汽车以消耗动力电池电能为主、燃油为辅,使整车燃油经济性达到最优,并且使发动机工作在高效低排放区。同时,为了兼顾动力电池的放电效率并延长使用寿命,要求动力电池的SOC在高效区域内工作。考虑到驱动电机本身效率较高,高效率区域分布较广,因此模糊控制策略的重点是优化发动机的性能,即尽可能维持发动机在最优曲线上运行[6]。
由于模糊控制策略的设计不依赖于被控对象的精确数学模型,而依赖于控制专家或操作者的经验知识[7],因此不同的设计人员依据不同的经验、角度可制定出不同的策略,丰富的经验是决定制定的模糊控制策略优劣的主要因素。
假设PHEV在2次充电之间的行驶里程已知,那么希望在汽车行驶至里程的终点时,动力电池的SOC能够刚好降到最低门限值,即汽车工作在电量消耗模式,进而充分发挥PHEV较大电池容量的优势,同时又希望发动机能够保持在高效区域内工作,提高整车的燃油经济性和排放性能;如果由于特殊情况使得汽车的行驶里程超出了这个“已知”的行程(本文称为“预设行程”),那么希望整车SOC能够保持在这个最低的门限值附近波动,即汽车工作在电量维持模式。随着GPS和现代交通技术应用的日益广泛,只要在导航仪中输入行车目的地,行车路径和行程也就确定下来了,使得以上这种假设成为可能,所以本文将出行工况的行驶里程作为模糊控制策略的重要因素之一。理论SOC参考轨迹如图1所示,将汽车出发时最高的SOC和行车终点时SOC最低门限值用直线相连,由于该直线非常吻合基于动态规划的全局优化控制方法仿真时动力电池SOC的变化轨迹[8],因此本文将这条线段称为理论SOC参考轨迹。
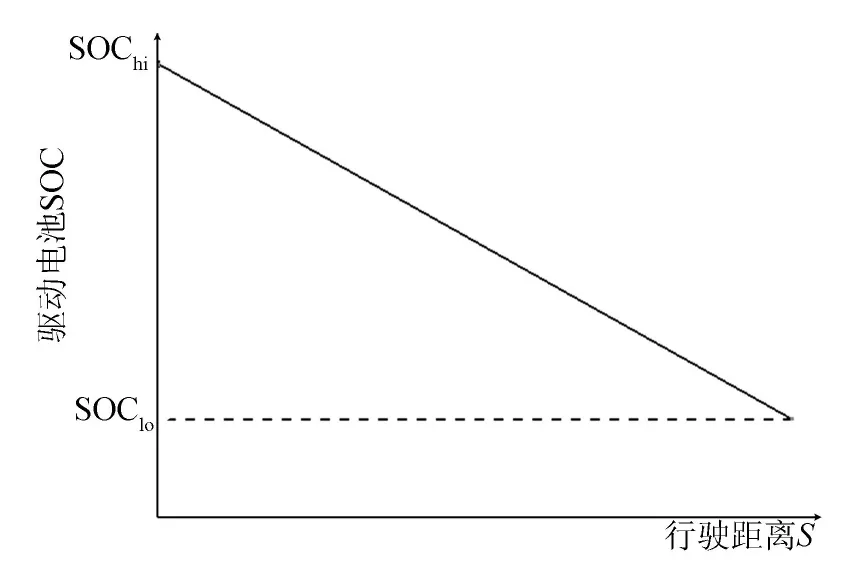
图1 理论SOC参考轨迹
根据这条理论参考轨迹,可依据(1)式计算汽车行驶至每个位置S处的SOC参考值SOCref(S)为:

其中,SOChi为汽车行驶起始时刻SOC参考值;SOClo为汽车行驶至预设行程终点时刻的SOC门限值;Xset为设定的总的行驶里程(预设行程);X(S)为已行驶的里程。
模糊控制策略的目标是当PHEV工作在电量消耗模式时,动力电池SOC能够尽可能地沿着理论SOC参考轨迹附近波动。ΔSOC的计算如图2所示,为了便于反应实际SOC对理论SOC参考轨迹的逼近程度,将汽车当前时刻下的SOC与汽车在下一位置时的SOC参考值SOCref(Sk+1)的差值ΔSOC作为模糊控制器的输入变量之一[9],即

其中,SOC(Sk)为当前时刻的SOC值。

图2 SOC的计算
选取汽车当前时刻的SOC作为模糊控制器的1个输入变量,再选取当前时刻汽车需求转矩Treq与发动机在当前转速下的最大输出转矩Tmax的比值K作为模糊控制器的输入变量,即

模糊控制器的输出变量为发动机当前时刻输出的目标转矩Teng与Tmax的比值Q,即

模糊控制策略的工作原理如图3所示,模糊逻辑控制器通过每一时刻输入值(K、SOC、ΔSOC)基于模糊控制器内部的推理机制得到唯一的模糊输出Q,将Q与发动机当前转速下的最大转矩Tmax相乘的结果作为发动机承担的转矩,由于整车所需转矩是在发动机和电机之间分配,因此,电机承担的转矩等于整车需求转矩减去发动机承担的转矩。

图3 模糊控制策略的工作原理
2.2 模糊控制器的设计
模糊逻辑控制属于智能型控制方法,其核心是模糊控制器,由规则库、推理机制、模糊化接口和去模糊化接口组成[10]。本文的模糊控制器是在Matlab/Simulink软件的模糊逻辑工具箱(Fuzzy Logic Toolbox)中进行设计的,能够方便地嵌入到ADVISOR控制策略模块中进行仿真分析,它含有3个输入变量和1个输出变量。K的模糊集合为{VL,L,M,H,VH},依次代表很低、低、适中、高、很高;SOC的模糊集合为{VL,L,M,H},依次代表很低、低、适中、高;ΔSOC的模糊集合为{NB,NS,ZE,PS,PB},依次代表负大、负小、0、正小、正大;输出Q的模糊集合为{ZE,L,M,B,VB},依次代表0、小、适中、大、很大。输入与输出的论域及隶属度函数如图4所示。

图4 输入、输出变量的隶属度函数
模糊控制规则是整个模糊逻辑控制器的核心,建立在对被控对象物理特性的理解和关于控制的直觉及经验的基础上,每一条规则必须准确且能反映设计者的控制意图[11]。本文的模糊控制规则见表1所列,采用“IF-THEN”的模糊推理规则。

表1 模糊控制规则表
在模糊推理过程中,模糊控制器的推理采用Mamdani方法,去模糊化采用重心法。该模糊规则的设计建立在经验总结的基础上,考虑了如下几点:
(1)当整车SOC偏高时,整车工作在电量消耗模式,保证动力电池SOC能够沿着理论SOC参考轨迹线附近波动并逐步稳定降低,若此时整车需求转矩较小(K值较小),应保证整车工作在纯电动模式,车辆行驶所需的转矩由驱动电机单独提供;若整车需求转矩较大(K值较大),参考ΔSOC大小调整发动机工作在高效率区域,此时由内燃机单独驱动或由内燃机和驱动电机联合驱动。
(2)当整车SOC降低至最低的门限值(SOClo)附近时,整车工作在电量维持模式,内燃机提供整车驱动所需功率的主要部分,并提供额外的功率为动力电池充电,保证整车SOC在门限值附近波动,驱动电机提供辅助动力。此时,ΔSOC对整车能量分配控制策略的影响程度被相对削弱。
(3)为了进一步保证内燃机工作在高效区域,需保证模糊输出Q不会出现在较小区间(0~0.3)内,当整车所需的功率对内燃机的需求非常小时,强制控制Q为0,使整车工作在纯电动模式。
3 模糊控制策略的仿真与分析
3.1 模糊控制策略的仿真
为了验证该模糊控制策略的有效性,本文基于电动汽车仿真软件ADVISOR2002,重新搭建了PHEV的仿真模型,并将已设计好的模糊逻辑控制策略嵌入到模型中进行仿真分析。首先,为了验证该模糊控制策略在燃油经济性以及排放性能上的表现,将模糊控制策略与基于逻辑门限值的电辅助控制策略在不同工况下的燃油经济性和排放性进行比较,所选择的工况模型为具有代表性的美国环保署EPA制定的城市道路工况UDDS和欧洲城市道路工况NEDC;其次,为了验证该模糊控制策略在不同预设行程下动力电池SOC轨迹曲线以及燃油经济性变化趋势,设计了汽车在 UDDS-n(n=2,4,6,8,10)工况下的仿真,其中UDDS-10为正确预测预设行程下的汽车行驶工况。汽车主要部件的仿真参数见表2所列。

表2 主要部件的仿真参数
3.2 仿真结果与分析
模糊控制策略和电辅助控制策略在UDDS-10、NEDC-10循环工况下的燃油经济性和排放性能对比见表3所列,其中,在模糊控制策略中取动力电池初始SOChi=1,最低门限值SOClo=0.3。仿真结果表明,该模糊控制策略能够在满足汽车动力性的前提下,有效提高燃油经济性并减少了汽车尾气的排放,2种工况下燃油经济性与电辅助控制策略相比分别提高11.44%、12.63%,并且排放性能也有较好的提升。

表3 燃油经济性和排放性能对比
UDDS-10工况下2种控制策略的发动机工作点对比如图5所示。从图5可以看出,模糊控制策略中发动机工作点主要分布在较低燃油消耗率的高效区,而电辅助控制策略中发动机工作点分布较广,有大量工作点分布在高燃油消耗率的低效区,从而说明该模糊控制策略能够有效地控制发动机在低燃油消耗率曲线上运行,提高燃油经济性和排放性能。

图5 UDDS-10工况下2种控制策略发动机的工作点
UDDS-10工况下2种控制策略动力电池SOC变化轨迹曲线,如图6所示。其中线段a为理论SOC参考轨迹,曲线b、c分别为模糊控制策略和电辅助控制策略下动力电池SOC变化轨迹。由图6可以看出,相比于电辅助控制策略,该模糊控制策略能够使动力电池SOC沿着理论SOC参考轨迹附近波动并平稳降低至设定的最低门限值0.3附近,发挥了PHEV较大的动力电池容量的优势,从而提高了整车经济性。
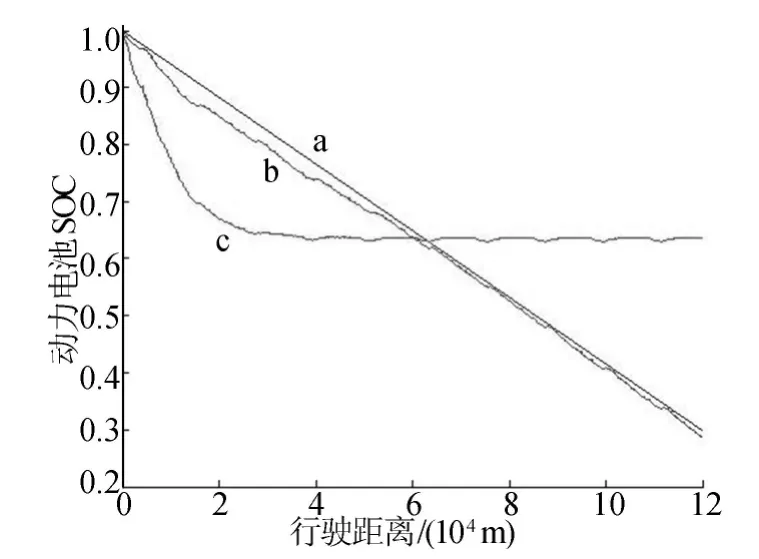
图6 UDDS-10工况下2种控制策略SOC变化轨迹
当出行时汽车的实际行程超过预设行程时,根据模糊控制策略的设计思想,动力电池SOC会沿着理论SOC参考轨迹下降至最低门限值,余下的行程汽车会进入电量保持阶段,此时,发动机工作在高效区,为整车提供所需功率的主要部分并将多余的功率为动力电池充电,使动力电池SOC维持在最低门限值附近波动。如图7所示为不同预设行程下的动力电池SOC变化轨迹,其中曲线a、b、c、d分别代表预设行程 UDDS-2、UDDS-4、UDDS-6、UDDS-8工况,用来模拟实际行程大于预设行程的工况,e为能够正确预测预设行程的UDDS-10工况。

图7 不同预设行程下SOC变化轨迹对比
由图7可以看出,不同的预设行程决定了初始时刻SOC下降的快慢程度,预设行程越短,SOC下降越快,当SOC降至门限值时均会保持在门限值附近波动,从而保证了动力电池不会因过度放电而降低使用寿命。
不同预设行程下的燃油消耗情况见表4所列。其中燃油消耗增加率是各预设工况与UDDS-10工况相比增加的百分率。
分析表4中数据可知,当实际行程大于预设行程时,燃油消耗会有所增加,并且两者相差越大,燃油消耗增加得越多。

表4 不同预设行程时燃油消耗率对比
4 结束语
本文以PHEV为研究对象,以整车燃油经济性和排放性能为目标,设计了一种需求转矩在发动机和驱动电机之间合理分配的模糊逻辑控制策略,并利用ADVISOR2002软件平台对整车经济性和排放性能进行了仿真和分析,本文的创新之处在于以理论SOC参考轨迹为控制策略的切入点,消耗动力电池的电能为主,燃油为辅,最大程度地发挥动力电池的存储能量。
(1)本文设计的模糊控制策略能够较好地根据不同行驶距离处的SOC参考值、动力电池荷电状态以及需求转矩实时调整发动机和电机之间的功率分配,优化发动机性能,在 UDDS-10、NEDC-10 2种工况下燃油经济性与电辅助控制策略相比分别提高11.44%、12.63%,排放性能也有较好的提升。
(2)所设计的模糊控制策略能够使动力电池SOC在理论SOC参考轨迹附近波动,并平稳降至最低门限值附近,既保障了动力电池的使用寿命,又充分发挥了PHEV动力电池容量大的优势。
(3)当实际行程超过预设行程时,随着两者偏差的增加,燃油消耗也会增加,正确地设置预设行程能够有效地降低燃油消耗。
(4)由于PHEV系统的复杂性,本文设计的模糊控制策略并不能保证整车性能达到最优,为了进一步优化仿真结果,在后续的研究中可通过融入更多的经验或一些优化算法如遗传算法、神经网络等来完成控制策略的优化设计,从而更好地优化整车仿真性能。
[1] 舒 红,彭 大,袁月会,等.插电式并联混合动力汽车动力传动系统与控制参数匹配设计[J].汽车工程学报,2012,2(2):105-112.
[2] 张丹红,龚永刚.并联混合动力汽车模糊控制能量管理策略研究[J].武汉理工大学学报:信息与管理工程版,2012,34(1):9-12.
[3] 张兵战.插电式混合动力电动汽车能量管理策略研究[D].合肥:合肥工业大学,2011.
[4] 张爱国.插电式混合动力轿车动力总成参数匹配及控制策略研究[D].广州:华南理工大学,2011.
[5] 谭德荣,孙静霞,王兴伟.基于 ADVISOR二次开发的Plug-in HEV模糊控制研究[J].重庆交通大学学报:自然科学版,2011,30(5):1054-1058.
[6] Zhu Fushun,He Hongwen,Lin Yi,et al.Study on fuzzy logic control strategy of ISG hybrid system[C]//International Conference on Computer,Mechatronics,Control and Electronic Engineering.Beijing:IEEE,2010:519-522.
[7] MATLAB技术联盟,高 飞.MATLAB智能算法超级学习手册[M].北京:人民邮电出版社,2014:158.
[8] 舒 红,聂天雄,邓丽君,等.插电式并联混合动力汽车模型预测控制[J].重庆大学学报:自然科学版,2011,34(5):36-41.
[9] 乔俊林.插电式并联混合动力汽车模糊控制策略研究[D].重庆:重庆大学,2012.
[10] 尹安东,李领领.基于CRUISE的轻度ISG型HEV控制策略研究[J].合肥工业大学学报:自然科学版,2012,35(1):5-8.
[11] 赵 震,王 铁.并联混合动力汽车模糊控制策略设计与仿真[J].北京汽车,2011(5):18-21.
猜你喜欢
汽车实用技术(2022年15期)2022-08-19 02:48:08
能源(2017年12期)2018-01-31 01:43:00
资源再生(2017年4期)2017-06-15 20:28:30
西南交通大学学报(2016年3期)2016-06-15 20:29:35
电子制作(2016年21期)2016-05-17 03:53:01
通信电源技术(2016年5期)2016-03-22 01:09:57
电源技术(2016年9期)2016-02-27 09:05:45
电源技术(2016年2期)2016-02-27 09:04:43
电源技术(2015年11期)2015-08-22 08:50:38
噪声与振动控制(2015年4期)2015-01-01 07:08:09