某无人机前起落架摆振动力学研究*
2015-03-02 06:26马伍元
机电工程 2015年10期
马伍元,周 凌
(中国科学院长春光学精密机械与物理研究所,吉林长春130033)
0 引 言
由于前三点式起落架在飞机起飞、着陆和滑跑过程中具有许多优点,轮式起降无人机广泛采用前三点式布局,但前轮摆振是该布局存在的一个突出问题。
为了满足现代战争对无人机高可靠性、高稳定性、高自主起降能力的要求,在设计阶段就应该充分考虑该问题,防止摆振发生。飞机前轮摆振是由支柱、前轮的侧向振动与围绕支柱轴线的前轮扭转振动相互耦合所引起的一种非常复杂的自激振动,维持这种自激振动的能量是飞机滑跑过程中由地面作用在轮胎上的力及力矩提供的[1]。
自20 世纪60年代至今,摆振研究领域取得了很多重大进展。起落架摆振模型和影响起落架摆振因素的研究已经发展的比较完善[2],但摆振研究中仍然有许多难题没有攻克,摆振问题仍然不能完全防止[3]。2006年,欧洲联合体资助名为分布式冗余机电前轮转向操纵系统的项目,其中一个重要目的就是消除起落架摆振;2009年10月,空客公司和英国布里斯托大学联合开展了旨在理解主起落架摆振现象的研究课题[4]。
近年来随着计算机技术和非线性动力学的发展,数字仿真和分叉理论等多种方法在摆振分析中得到了应用[5]。文献[6]对摆振的多种分析方法进行了阐述。文献[7]对非线性摆振及其主动控制进行了研究。文献[8]对柔性前起落架进行了摆振分析。
Simulink 是Matlab 最重要的组件之一,具有适应面广、结构和流程清晰及仿真精细、贴近实际、效率高、灵活等优点,被广泛应用于线性系统、非线性系统、数字控制及数字信号处理的建模和仿真中,在飞机前起落架、汽车前轮的摆振仿真中均有应用[9-10]。
本研究以某小型轮式起降无人机的前起落架为例,考虑其非零前倾角、支柱扭转及侧向柔性等,建立其摆振动力学模型,采用Simulink 进行仿真分析。本研究主要通过仿真确定合理的减摆阻尼形式和参数,指导前起减摆装置的设计。
1 摆振动力学模型的建立
1.1 坐标系定义
无人机前起结构如图1 所示,该结构采用了摇臂式布局。x 轴水平向后,y 轴水平向右。各角度方向定义如图1 所示。
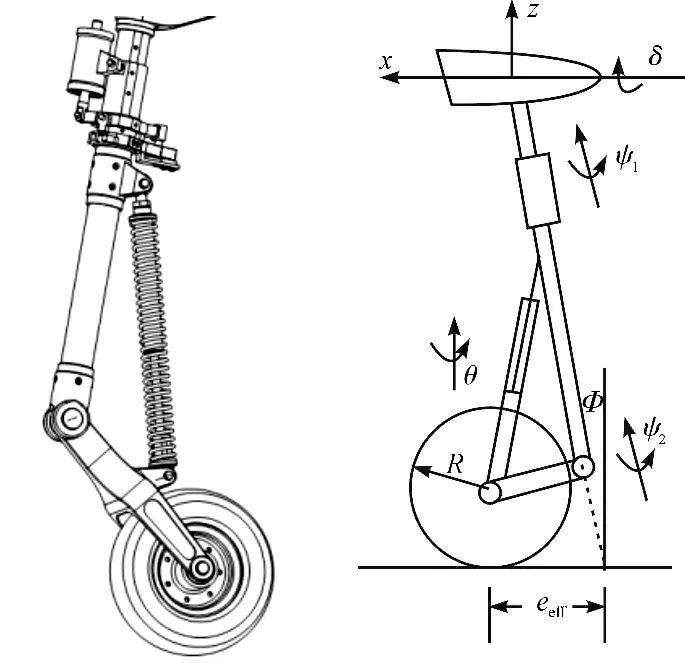
图1 前起结构简图
1.2 摆振运动方程组
扭转方向上,减摆器作为分界线,上部视为固定,下部视为活动。本研究以减摆器下部可旋转部分为研究对象,列扭转方向动力学方程:

式中:MDψ—减摆器阻尼力矩和回中力矩,阻尼力矩包括前轮摆动机构轴系等效库伦摩擦、线性阻尼及平方阻尼;回中力矩的作用是使前轮接地前自动回到中立位置:

以减摆器为研究对象,其阻尼力矩和回中力矩与支柱弹性扭转力矩相平衡:

由于支柱具有前倾角φ,则前轮绕z 轴转角θ 与其绕支柱转角ψ2间关系:

有效稳定距和结构稳定距间关系:

式(1~5)中:ITG—支柱及机轮等下部质量绕支柱的转动惯量;e1—机械稳定距;e—有效稳定距;φ—支柱倾角;ψ1,ψ2—减摆器处支柱扭转角及机轮扭转角,θ—前轮绕竖直轴转角;MF1,MDλ—轮胎作用力矩及阻尼力矩;Fz—前起竖直载荷;Ct0,Ct1,Ct2—转轴系统库伦阻尼力矩系数、减摆器线性阻尼系数和平方阻尼系数;Ks—减摆器回复刚度;Kt—支柱扭转刚度;Ms—回中力矩。
侧摆方向上,考虑前起支柱侧向柔性,列前起侧向动力学方程:

式中:Mkδ—支柱侧向弹性力矩:

式中:MDδ—支柱侧向阻尼力矩:

式中:Mλδ—轮胎侧向力作用力矩:

式(6~9)中:侧向摆动惯量;δ—侧向摆动角度;θ—机轮绕竖直轴转角;Fkλ—轮胎侧向变形引起的非线性弹性回复力;kδ,cδ—支柱侧向刚度和阻尼系数;lg—地面到前起与机身安装点的距离。
1.3 轮胎力学模型
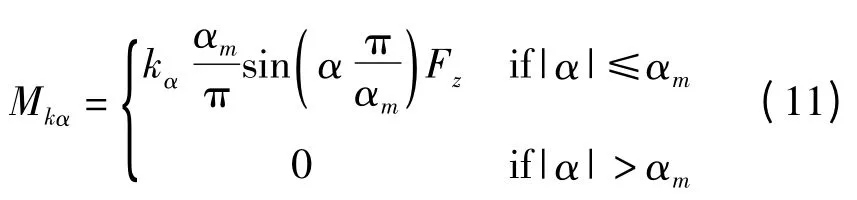
轮胎回正力矩和侧向力引起的扭转力矩:

式中:Mkα—轮胎非线性扭转回正力矩,由扭转刚度、侧偏角、竖直载荷等确定,可由分段函数表示:
轮胎侧向力采用下式计算:

轮胎侧偏角由下式得到:

轮胎阻尼力矩:

采用一阶近似的张线理论,将侧向摆动引起的机轮侧向偏移速度等效到侧偏速度中[4],得到轮胎运动学约束方程:
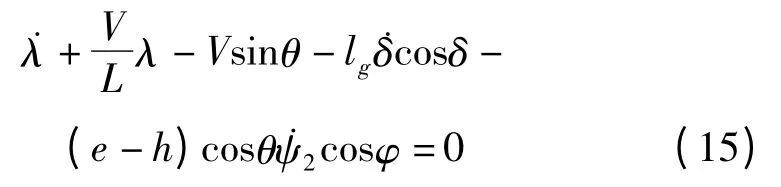
式(10~15)中:Kα,kλ—轮胎扭转刚度和侧向刚度;cλ—轮胎阻尼系数;λ—轮胎触地中心侧向位移;α—轮胎侧偏角;αm—极限侧偏角;L—轮胎松弛长度;h—轮胎触地面半长;V—无人机滑行速度。
2 仿真计算
一般来讲,减摆阻尼可以由库伦摩擦或油液减摆器提供。库伦阻尼可由转轴系统的摩擦产生,也可由减摆器活动部分与导向密封装置间的摩擦产生,还可由特意设置的干摩擦装置产生。
油液减摆器阻尼一般呈非线性,包含平方阻尼、线性阻尼、库伦阻尼等。线性阻尼和库伦阻尼的相对大小由减摆器阻尼元件的特性、油液特性等决定。
本研究采用Matlab 软件的Simulink 模块对上述前起落架摆振动力学模型进行求解,以阻尼参数的确定为例,对比3 种常见阻尼的减摆效果。模型可分为轮胎模块、扭转方向模块、侧向摆动模块、减摆器模块等。无人机滑行速度取1.3 Vss,最大竖直载荷取为停机载荷的2 倍,初始扰动ψ2取0.15 rad。
2.1 无阻尼
当阻尼为零,即Ct0=Ct1=Ct2=0,ψ2、δ 时间历程曲线如图2 所示。前起在扭转方向和侧摆方向均发生了稳定的等幅摆振。为了防止可能产生的摆振,系统有必要增加阻尼。
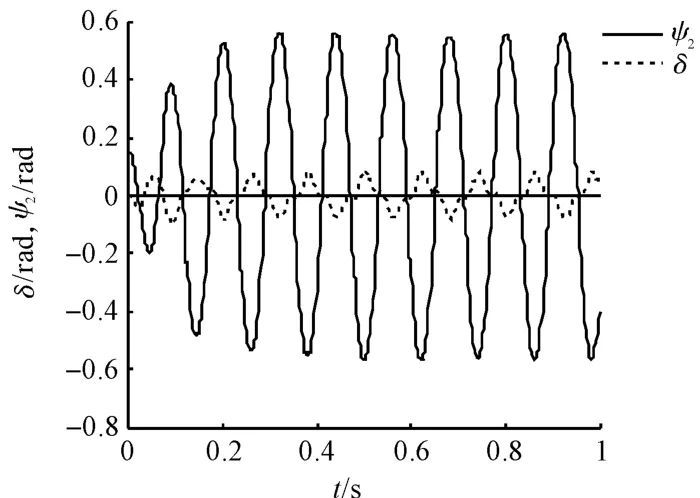
图2 ψ2 及δ 时间历程(无阻尼)
2.2 库伦摩擦
本研究在系统中增加库伦摩擦阻尼,大小超过一定数值后即可抑制摆振。当Ct0≥7,Ct1=Ct2=0 时,ψ2及δ 时间历程如图3 所示,前轮在该速度下不发生摆振。但库伦摩擦在前轮缓慢摆动时也会产生较大阻尼,影响前轮自由定向,也不利于前轮转向。另外,库伦摩擦的大小取决于结合面的摩擦系数和正压力大小,并且有可能随着磨损、温度、湿度等发生变化,可靠性低。因此本研究在减摆装置中较少采用库伦摩擦。
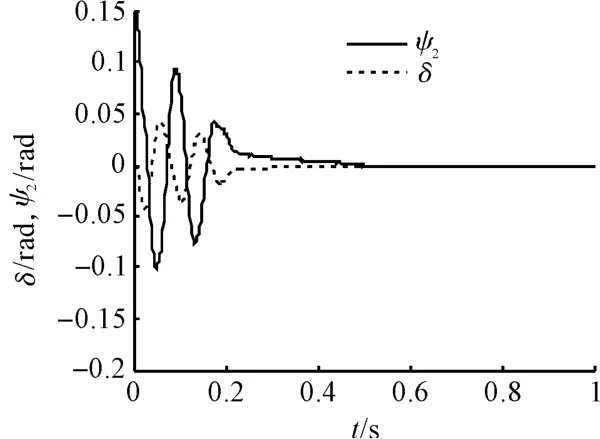
图3 ψ2 及δ 时间历程(Ct0 =7)
2.3 线性阻尼
当系统中增加线性阻尼后,当Ct1≥2,Ct0=Ct2=0时,初始扰动引起的扭转振动和侧向摆动振幅在3 个周期后衰减为最大值的1/4 或更小,满足GJB 5097—2002 的要求。当Ct1=2,ψ2、δ 时间历程曲线如图4 所示。线性阻尼的效果要优于库伦阻尼,既能使前轮摆振较快衰减,也不会对前轮的自由定向及操纵转向造成影响。
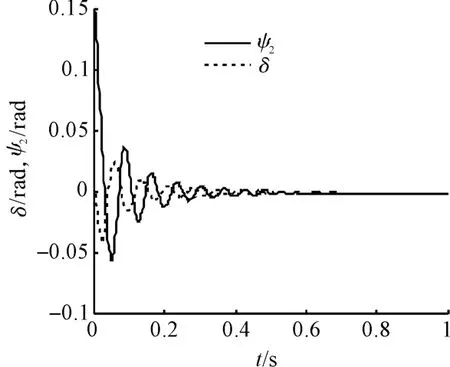
图4 ψ2 及δ 时间历程(Ct1 =2)
2.4 平方阻尼
当系统中增加平方阻尼,Ct2≥0. 8,Ct0= Ct1=0时,初始扰动引起的振动衰减很快。Ct2取0.8 时,ψ2最终并未收敛至零,而是呈现微幅振动。这是因为阻尼力的大小与振动速度的平方成比例,在微小振动下难以产生足够的阻尼力矩抑制振动。
当将Ct2增大至5 时,振动迅速衰减至零,继续增大阻尼系数,系统呈现出显著的过阻尼特性。但实际系统中必然存在一定的库伦摩擦,会抑制小幅振动。当Ct0=0.8,Ct2=0.8 时,ψ2、δ 时间历程如图5 所示,均很快收敛为零。较小的平方阻尼辅以少量的库伦摩擦既可以较快的耗散摆振能量,又不会产生过大的阻尼力。
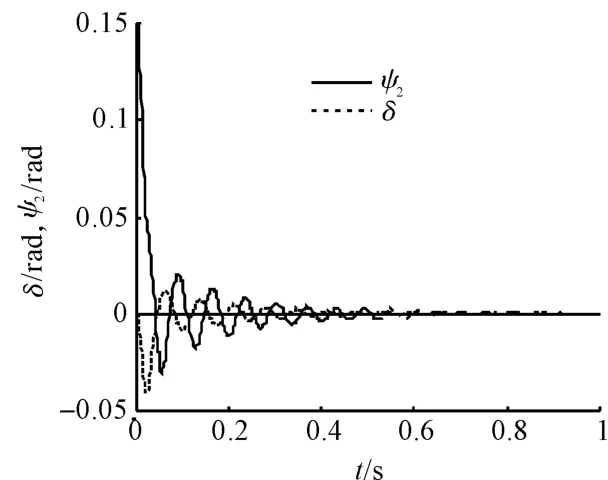
图5 ψ2 及δ 时间历程(Ct2 =0.8,Ct0 =0.8)
3 样机开发与试验
基于建立的前起摆振动力学模型,本研究确定了合适的阻尼范围并对其他参数如支柱前倾角、稳定距、系统各环节刚度等参数进行了分析,最后研制了活塞式油液阻尼减摆器和前起样机。装配完毕的前起样机如图6 所示,该样机采用了摇臂式布局,包括支柱、减摆器、对中机构、缓冲器、机轮等部件。
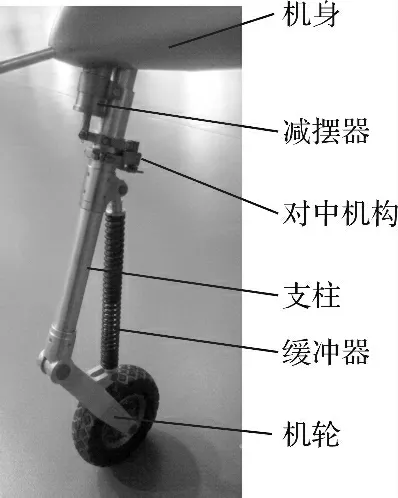
图6 无人机前起样机
装备该型前起的无人机在外场进行了多次中高速滑跑试验,无人机运行平稳,未发生摆振现象,验证了本研究前起减摆装置设计方法的正确性。
4 结束语
本研究建立了某无人机前起落架的摆振动力学模型,并采用Matlab/Simulink 进行了时域仿真,以阻尼参数的确定为例,对比了3 种形式的阻尼对摆振的抑制效果。一定的库伦阻尼可以抑制摆振,但不利于前轮自由定向和转向。线性阻尼和平方阻尼均能较好的抑制摆振,既能使摆振能量快速衰减,又不会产生过大的阻尼力矩。最后笔者研制了前起样机,并进行了外场滑跑试验。
本研究采用数字仿真的方法研究摆振,可以直观地看出各参数对系统响应的影响,有助于摆振分析和防摆设计。
[1]诸德培.摆振理论及防摆措施[M].北京:国防工业出版社,1983.
[2]JOCELYN I. PRITCHARD. An overview of landing gear dynamics[R].Virginia:Langley Research Center,1999.
[3]陈大伟,顾宏斌.起落架摆振控制及试验研究综述[J].飞机设计,2001,31(2):38-41.
[4]常 正,金秀芬,等.国内外起落架摆振研究进展及工程防摆设计的若干思考[J]. 航空工程进展,2011,2(3):273-275.
[5]THOTA P,KRAUSKOPF B K. Interaction of torsion and lateral bending in aircraft nose landing gear shimmy[J].Nonlinear Dyn,2009(57):455-467.
[6]SOMIESKI G. Shimmy analysis of a simple aircraft nose landing gear model using different mathematical methods[J].Aerospace Science and Technology,2009(8):1270-9638.
[7]陈大伟,顾宏斌,刘 晖.起落架摆振主动控制分岔研究[J].振动与冲击,2010,29(7):38-42.
[8]常 正,聂 宏.飞机柔性前起落架摆振仿真分析[J].航空工程进展,2011,2(7):432-436.
[9]冯 彪,魏小辉,聂 宏.基于Simulink 的飞机前起落架摆振仿真分析[J].江苏航空,2011(S):7-10.
[10]赵桂范,王立辉,闫晓晓.前梁对汽车前轮摆振的影响分析及仿真研究[J].计算机仿真,2007,24(10):236-260.
猜你喜欢
装备制造技术(2021年4期)2021-08-05
中原商报·科教研究(2021年6期)2021-05-13
百科探秘·航空航天(2020年8期)2020-07-29
军民两用技术与产品(2019年12期)2020-01-19
红蜻蜓·低年级(2015年11期)2016-02-02
黑龙江史志(2014年1期)2014-11-11
中国自行车·骑行风尚(2014年4期)2014-10-10
中外书摘(2014年9期)2014-09-18
教练机(2013年3期)2013-10-11