四轮转向车辆操纵稳定性仿真分析
2015-02-28 04:41刘泽明黄妙华周亚鹏
时代农机 2015年2期
刘泽明,黄妙华,周亚鹏
(武汉理工大学 汽车工程学院,湖北 武汉 430070)
四轮转向车辆操纵稳定性仿真分析
刘泽明,黄妙华,周亚鹏
(武汉理工大学 汽车工程学院,湖北 武汉 430070)
采用线性二自由度汽车模型,建立汽车四轮转向的运动微分方程式,从而对四轮转向汽车进行转向特性的进一步研究。在建立四轮转向汽车操纵动力学的模型基础上,借助MATLAB/Simulink模块对四轮转向汽车的动力学响应进行仿真分析,并将仿真结果与传统的前轮转向汽车作对比。仿真结果表明:四轮转向汽车在高速行驶时具有更好的操纵稳定性。
四轮转向;操纵稳定性;质心侧偏角;横摆角速度;侧向加速度
四轮转向(4WS)作为汽车主动安全的主要技术,其基本原理是利用车辆行驶中的信息控制后轮的转角输入以提高车辆的操纵稳定性。具备四轮转向能力的汽车在低速行驶时,能够提高车辆灵活性;在中、高速时,车辆的操纵稳定性会加强。本文将对传统的前轮转向汽车、前后轮转角比为定值、后轮转角仅有横摆角速度控制、后轮转角由前轮转角和横摆角速度共同控制的四轮转向汽车四种车型进行分析。
1 4WS动力学模型建立
1.1 模型简化
为了便于掌握操纵稳定性的基本特性,我们采用线性二自由度汽车模型进行分析,如图1所示。假设车厢只做平行于地面的平面运动,即汽车沿z轴的位移,绕y轴的俯仰角与绕x轴的侧倾角均为零。
1.2 受力分析

图1 二自由度4WS汽车模型
根据数学运算关系可以得到:

如果采用的是前后轮转角成比例的控制方法。此时因为横摆角速度r为定值,则v'=0,r'=0可以得出:

2 MATLAB/Simulink下的仿真研究
2.1 四轮转向系统的建模
Simulink是一个控制系统建模与仿真的实用工具。本文主要分析中高速行驶时四轮转向和前轮转向对车辆操纵稳定性的影响。横摆角速度、侧向加速度和质心侧偏角是影响车辆侧向稳定性的主要因素。
在MATLAB/Simulink中建立四轮转向模型。如图2所示:
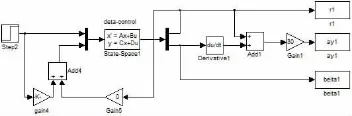
图2 前轮转角控制的四轮转向模型
2.2 仿真结果及分析
如图3、4所示,运行建立的四轮转向模型,得到仿真结果数据。采用Plot命令将结果绘制成图,如图5、6、7所示。

图3 横摆角速度控制的四轮转向模型
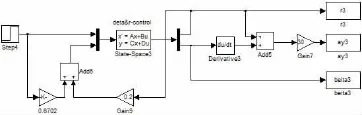
图4 前轮转角和横摆角速度共同控制的模型
通过仿真结果比较可知:由前轮转角控制后轮转角的四轮转向车辆使得车辆的质心侧偏角、横摆角速度的最大值显著降低,同时调整时间也有所缩短。四轮转向汽车提高了汽车的操纵稳定性。

图5 汽车侧向加速度

图6 汽车横摆角速度
3 结论与展望
根据以上仿真分析,得出如下结论:
(1)四轮转向车辆的质心侧偏角、横摆角速度和侧向加速度的最大值显著降低,同时调整时间也有所缩短,实现了稳态条件下转向过程中的零侧偏角,这有助于转向运动更加平稳,提高了车辆的操纵稳定性。

图7 汽车质心侧偏角
(2)在四轮转向的设计过程中,应根据具体情况合理选取K和值。
(3)未来的四轮转向控制,应能降低车辆的质心侧偏角以提高操纵稳定性,又能保持车辆的横摆角速度基本不变以保证驾驶员的转向感觉。四轮转向具有良好的发展前景。
[1]王纪瑞,左曙光.四轮转向汽车后轮转角控制因子控制效果研究[N].佳木斯大学学报.2010,28(3):2.
[2]万百五,韩崇昭.控制论—概念、方法与应用[M].清华大学出版社,2009.
[3]黄忠霏.控制系统MATLAB计算及仿真[M].北京:国防工业出版社,2004.
[4]余志生.汽车理论[M].北京:机械工业出版社,2000.
Study on the Simulation of Four-wheel-steering Vehicles’Control Stability
LIU Ze-ming,HUANG Miao-hua,ZHOU Ya-peng
(Automotive Engineering,Wuhan University of Technology School,Wuhan,Hubei 430070,China)
A Four-wheel-steering vehicle dynamic model with two degrees of freedom is presented in the article,with which we can develop a deeper study on the steering characteristics of the Four-wheel-steering system.Based on the Four-wheel-steering vehicle dynamic model,we have a study on the dynamic response of the Four-wheel-steering vehicle in the MATLAB/Simulink.The conclusion shows that four-wheel-steering vehicle has a better control stability than the conventional front-wheel-steering vehicle in high speed.
Four-wheel-steering;Control stability;Sideslip of the yaw;Angular velocity;Lateral acceleration
U463.42
A
2095-980X(2015)02-0063-02
2015-01-18
刘泽明(1993-)男,山东郓城人,硕士研究生,主要研究方向:新能源汽车。
猜你喜欢
汽车维护与修理(2022年5期)2022-09-06
民用飞机设计与研究(2020年4期)2021-01-21
新课程·中学(2019年7期)2019-09-17
小学生学习指导·爆笑校园(2019年6期)2019-09-10
物理教学探讨(2018年1期)2018-02-13
红蜻蜓·低年级(2015年11期)2016-02-02
汽车文摘(2015年3期)2015-12-11
中国自行车·骑行风尚(2014年4期)2014-10-10
铁道建筑(2010年11期)2010-07-30