
球形水果采摘末端执行器设计与仿真
2015-02-28 04:41:25李国利张恺钰
时代农机 2015年2期
时 光,李国利,陈 健,刘 登,张恺钰
(金陵科技学院 机电工程学院,江苏 南京 211169)
球形水果采摘末端执行器设计与仿真
时 光,李国利,陈 健,刘 登,张恺钰
(金陵科技学院 机电工程学院,江苏 南京 211169)
末端执行器的工作直接关系到采摘机器人整个采摘作业能否准确、高效。设计了一种能够完成多种球状果实采摘的机器人末端执行器。该末端执行器采摘作业时无需检测与果实的接触力,采用单个电机可实现整个采摘控制。采用SolidWorks软件设计了末端执行器整体结构,并应用Adams构建虚拟样机进行运动仿真,验证了方案的可行性。该末端执行器结构简单、制作成本低,适合多种球状果实采摘。
末端执行器;球形水果;设计;虚拟样机
果实采摘是果蔬生产过程的重要环节。末端执行器是安装于采摘机器人机械手臂前端进行采摘作业的关键部件。因此采摘机器人末端执行器的设计非常重要。国内外学者针对采摘机器人末端执行器做了大量研究工作,设计了多种水果采摘机器人末端执行器。
根据分离果树与果实的方式,目前大部分末端执行器大体分为两类:第一类,强行拉断果梗来实现果实与果树的分离;第二类,先用夹具加紧果实,再通过剪刀、锯条、高压水枪、激光等工具切断果梗,从而将水果从果树上采摘下来。对于第一类采摘末端,容易拉断其他枝条,对果树的伤害较大。而第二类采摘执行末端也存在较多缺点:其一,执行器在切断果梗之前,要先用夹具夹住果实,夹具的力很难控制,过小会导致果实的脱落,过大则会损坏水果;其二要准确抓取果实,这对机器人视觉系统以及机械手的控制要求较高,微小的误差都会导致采摘的失败。文章提出了一种球形水果采摘末端执行器,该末端执行器采摘过程中不需要接触果实果皮部分,可吸收部分视觉与控制方面的误差,采用单电机控制。通过Adams构建虚拟样机验证了方案的可行性。
1 末端执行器结构设计
末端执行器的机械结构主要由伸缩机构、切割机构、回收机构和传感器四个部分组成,总体机械结构如图1所示。图2为末端执行器剖视图。

图1 末端执行器结构图
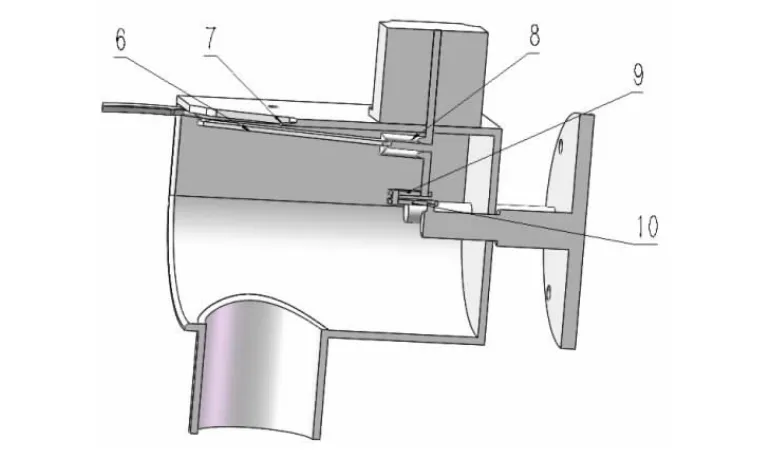
图2 末端执行器剖视图
1.1 伸缩机构
末端执行器的伸缩机构是通过曲柄滑块机构来实现的,其中曲轴、连杆2、连杆3、执行器主体和法兰构成曲柄滑块机构,曲轴和连杆2固结、连杆2和连杆3构成转动副,执行器主体和法兰之间构成移动副。曲轴与电机转子通过联轴器连接,电机转子转一圈,该机构实现一次伸缩动作。伸缩机构用来实现摆杆和执行器主体上刀片的同时动作,减轻采摘过程对果实的影响,同时补偿机械臂的运动误差,进而提高采摘成功率。
1.2 切割机构
末端执行器切割机构用来分离果实与枝干,如图3所示,由固定在执行器主体上的刀片与曲轴、连杆1及摆杆组成。其中曲轴与连杆1及连杆1与摆杆之间通过铰链连接,摆杆的末端同样通过铰链连接在执行器主体上。这样摆杆、连杆1、曲轴和执行器主体构成曲柄摇杆机构。曲轴与电机轴相连,电机轴的转动可以转化为摆杆的摆动,与固定在执行器主体上的刀片相配合,可实现剪短果梗的功能。该机构还具有急回特性,大大缩短了切割时间,提高机构的切割效率。且摆杆做成圆弧状,防止工作时果实脱落。伸缩机构与切割机构由同一电机控制。刀片位于果实容器的正上方,这样剪断果梗的同时,果实也落入果实容器中。

图3 切割机构结构图
1.3 回收机构
末端执行器回收机构用来存放果实,是一个没有底面圆柱体容器,在圆柱体的下底面有一个可绕一轴线旋转的挡板,这样可控制容器的开合。它主要实现果实的临时存放与回收。当执行采摘操作时,挡板挡住圆柱体的下底面,果实可以盛放在果实容器中。当采摘完成,准备回收果实的时候,挡板打开,果实与执行器末端分离。切割机构的刀片与回收机构相对位置固定,避免切割操作前割断果梗而导致采摘失败。
1.4 传感器系统
末端执行器的传感器为一个超声波发射与接收装置。首先通过双目视觉的分析,主机械臂将末端执行器带到离目标果实合适的地方。这时,传感器开始工作,它发射并接受返回超声波,一方面通过CPU提取超声回波信号幅值实现果实与果树枝叶的识别,另方面通过检测超声波发射与接收的时间差进行目标果实测距。确定目标果实的精确位置。从而达到提高机械部分运动精度和提高采摘成功率的目的。
2 Adams仿真与可行性分析
为了进一步说明本末端执行器的采摘动作原理和论证结构方案的合理性,文章利用虚拟样机软件ADAMS构建了末端执行器虚拟样机,对其采摘作业过程进行了仿真。首先通过SolidWorks三维绘图软件画出末端执行器的装配图,在将配图导入到ADAMS中,在ADAMS中添加各个运动副和设定电机的转速,如图4所示。该末端执行器采摘步骤为:(1)机械臂带着执行器一起运动到离目标果实适当位置处;(2)电机转动,带动摆杆缓慢旋转,同时执行器主体向目标果实靠拢。(3)当果实靠近刀片时,摆杆继续旋转,剪短果梗。(4)剪短果梗后,电机继续旋转,带动执行器主体和摆杆回到初始位置。仿真实验中,电机转速设为30r/min,采摘仿真时间为2s、步数为2000、重力加速度为9.8N/m。在摆杆和刀片上分别添加点“MARKER_one”和“MARKER_knife”。利用Adams的Post-Processor模块仿真这两个MARKER点的位移,得到两个MARKER点位移如图5所示。
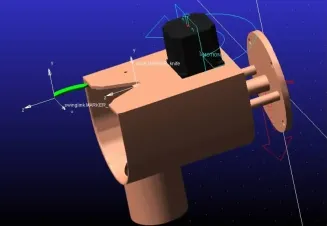
图4 Adams仿真界面

图5 末端执行器运动仿真曲线
3 结语
文章设计了一种适于球形果实采摘的采摘机器人末端执行器,并通过建立虚拟样机进行了仿真分析,检验了末端执行器机构运动的平稳性与可靠性。所设计的末端执行器结构与控制方式简单,采摘作业速度较高,能较好地吸收机器人视觉与机械臂的控制误差。通用性好,可以满足不同类型球形水果的采摘的要求。
[1]宋健,张铁中,徐丽明,等.果蔬采摘机器人研究进展与展望[J].农业机械学报,2006,37(5):158-162.
[2]方建军.移动式采摘机器人研究现状与进展 [J].农业工程学报,2004,20(2):273-278.
[3]崔玉洁,张祖立,白晓虎.采摘机器人的研究进展与现状分析[J].农机化研究,2007(2):4-7.
[4]刘金,巩胜磊,宋健.茄子采摘机器人虚拟样机设计与仿真[J].机床与液压,2014,(11).
[5]王粮局,张铁中,褚佳,杨丽,张洁,段运红.大容差高效草莓采摘末端执行器设计与试验[J].农业机械学报,2014(11).
[6]史慧文,石慧奇,王继祥.草莓采摘手爪结构设计[J].农机化研究, 2014,(9).
[7]钱少明,杨庆华,王志恒,等.黄瓜抓持特性与末端采摘执行器研究[J].农业工程学报,2010,26(7):107-112.
[8]Shigehiko Hayashi,Tomohiko Ota,Kotaro Kubota,etal.Robotic Harvesting Technology for Fruit Vegetables in Protected Horticultural Production[J].Information and Technology for Sustainable Fruit and Vegetable Production,Frutic,2005,5:227-236.
[9]陈军,王虎,蒋浩然,等.猕猴桃采摘机器人末端执行器设计[J].农业机械学报,2012,43(10):151-154.
[10]Naoshi Kondo,Kazuya Yamamoto,Hiroshi Shimizu,et al.A Machine Vision for Tomato Cluster Harvesting Robot[Jl.Engineering in Agriculture,Environment and Food,2009,2(2):60-65.
[11]丁加军,刘桂芝,杨文亮.一种果实采摘末端执行器设计与仿真分析[J].农机化研究,2013(1):112-115.
[12]Naoshi Kondo,Koki Yata,Michihisa Iida,et al.Development of an End-Effector for a Tomato Cluster Harvesting Robot[J].Engineering in Agriculture,Environment and Food,2010,3(1):20-24.
[13]马履中,杨文亮,王成军,等.苹果采摘机器人末端执行器的结构设计与试验[J].农机化研究,2009,12:65-67.
[14]E.J.Van Hentena,D.A.Van’t Slot,C.W.J.Hold,et al.Optimal Manilpulator Design for a Cucumber Harvesting Robot[J].Computers and Electronics in Agriculture,2009,65:247-257.
[15]刘继展,李萍萍,李智国.番茄采摘机器人末端执行器的硬件设计[J].农业机械学报,2008,39(3):109-112.
Structural Design and Simulation of the End-effector for Spherical fruit Picking
SHI Guang,LI Guo-li,CHEN Jian,LIU Deng,ZHANG Kai-yu
(School of Mechanical and Electronic Engineering,Jinling Institute of Technology,Nanjing,Jiangsu 211169,China)
The work of end-effector is closely related to whether the picking operation of the picking robot is accurate and efficient.An end-effector which is suitable for spherical fruit is designed.The end-effector is controlled by a single motor and there is no need to test the contact force on the fruit.The structure of end-effector was designed with the SolidWorks and the virtual prototype was established by Adams to simulate the movement and v the feasibility of the solution was verified.The structure of end-effector is simple and its cost is low,it is suitable for the picking of a variety of spherical fruits.
End-effector;Spherical fruit;design;virtual prototype
TP242
A
2095-980X(2015)02-0030-02
2015-01-17
2014江苏省高等学校大学生实践创新训练计划重点项目(201413573007Z)。
时光(1994-),男,江苏淮安人,大学本科,主要专业方向:机电一体化。
李国利(1973-),男,山东滨州人,硕士,副教授,研究方向为:农业机器人,智能化检测技术。
猜你喜欢
农业机械学报(2023年10期)2023-11-23 04:37:46
沈阳建筑大学学报(自然科学版)(2023年4期)2023-09-13 03:05:12
现代食品科技(2021年9期)2021-10-09 05:19:22
塑料包装(2019年6期)2020-01-15 07:55:48
南方农业·上旬(2019年8期)2019-09-23 09:36:43
设备管理与维修(2019年14期)2019-06-16 02:02:32
测控技术(2018年12期)2018-11-25 09:37:50
现代机械(2018年5期)2018-11-13 10:06:16
中国果业信息(2018年5期)2018-01-17 22:03:11
制造技术与机床(2017年9期)2017-11-27 02:13:45
