隧道接触网施工钻孔设备电液控制系统的设计
2015-02-24 07:38刘军刘桓龙柯坚王国志邓斌
机床与液压 2015年22期
刘军,刘桓龙,柯坚,王国志,邓斌
(西南交通大学机械工程学院,四川成都 610031)
针对现有地铁隧道刚性悬挂接触网安装施工中锚螺栓孔钻孔工艺机械化程度和钻孔质量低的特点设计的新型钻孔设备,其三维模型如图1所示。

图1 钻孔设备结构简图
该装置的主要功能是实现钻具在隧道内钻孔定位的机械化和自动化,然后控制钻具完成钻孔作业。其结构主要包括升降机构、旋转机构、调平机构和XY向运动机构,通过电液控制系统控制其运动。其中,升降柱机构主要通过液压缸驱动的套管立柱实现上下直线运动,旋转机构通过摆动液压缸驱动齿轮带动设备实现水平面内旋转,调平机构采用液压驱动实现平台的左右自动调平,XY向运动机构为水平面内的直线运动机构。作者对钻孔设备的电液控制系统进行设计,通过电信号按照作业要求实现对机构的运动控制。
1 液压控制系统设计
各运动机构均采用液压驱动。其中X、Y向运动机构驱动液压缸的设计行程为750 mm,调平机械的设计调平范围为±15°,旋转机构摆动液压缸的摆动范围为±120°,升降机构的设计行程为1 000 mm。各液压缸除了能平稳地运动到预定位置外还能实现在预定位置的可靠锁定。液压控制系统原理如图2所示。

图2 钻孔设备液压控制系统原理图
如图2,因为要对各执行元件实行分别控制,所以液压系统采用由多路换向阀8组成的并联回路组成。液压泵3输出的油能直接进到各换向阀8的进油腔。各联控制回路通过换向阀8的右位卸荷,左位进油工作。
如图2所示,X向运动机构液压缸12.1通过两个调速阀实现两级调速,方便钻孔装置的精确定位。为实现较平稳的速度换接,两个调速阀采用串联连接。为使液压缸能实现任意位置的可靠锁定,在液压回路上设计由两个液控单向阀组成的双向液压锁,同时液控单向阀还具有平衡阀的作用。Y向运动机构液压控制回路原理相同。
旋转机构液压控制回路中设计有两个平衡阀16.1、16.2,使摆动液压缸的运动平稳。摆动液压缸17的制动器液压缸18为常抱闸状态,在回路不通油时,其在弹簧力的作用下将摆动液压缸锁定,当回路进油即电磁铁12YA得电时,油压克服弹簧力缓慢地将制动器液压缸18与摆动液压缸17分离,从而摆动液压缸能正常转动,并带动钻孔设备平台转动。在旋转机构上设计有角度传感器,用以观测摆动液压缸的旋转角度,方便控制。
升降机构液压控制回路有两个执行元件,即控制机械锁销的弹簧复位液压缸20和驱动升降柱运动的液压缸12.3。两个执行元件的控制回路通过行程开关实现顺序控制。机构上升时,液压回路首先将锁死销拔出,然后控制机构上升。当机构到达预定钻孔位置后,锁死销重新将机构机械锁定,同时液压缸12.3通过液控单向阀22.5和蓄能器21实现液压锁定。机构下降时,液控单向阀22.5起平衡阀作用。当机构下降到最低位时,机械锁将升降机构锁定。在液压缸无杆腔的进油口还设计有防爆阀23,当进油管道爆裂时,管路流量突然增大,防爆阀自动关闭,阻止液压缸突然下落,防止安全事故的发生。
当钻孔装置平台倾斜时,不仅会影响装置的定位精度,严重时会引起平台侧翻。调平机构液压控制回路中两个液控单向阀22.6、22.7起双向液压锁和平衡阀的作用。同时,由于液压缸12.4是立式的,为了防止液压缸向下运动时由于液控单向阀的开和关断断续续而引起的振动现象,在回路上设计有单向节流阀,使回油路油液的流速平稳,从而减小液压缸的振动。
2 电控系统设计
液压系统中各电磁铁、继电器和行程开关的动作顺序由电控系统控制。电路控制系统的原理图如图3所示。

图3 电控系统原理图
图3中,YA指液压缸电磁铁的继电器开关,分常开和常闭型。L0为总开关指示灯。K1为各运动机构速度调节中的快速开关;K2为慢速开关。其他各开关分别成对控制某一运动机构驱动液压缸的正反向运动。并且各运动机构正反向运动控制开关都设计为接通和切断信号反向互锁,防止误操作。
3 无线控制系统设计
电控系统中各物理开关既可以通过计算机实现全自动控制又可以通过手动控制。通过无线传输控制信号能解决有线传输布线繁琐、束缚操作人员活动空间且不易拆卸的问题。基于隧道内环境和可靠性要求的考虑,决定采用基于DTMF编码的远程无线控制方案。
DTMF编码即双音多频信号,由一组高频信号和一组低频信号组成,具有简单、稳定、抗干扰能力强的特点,并广泛应用于固话、对讲机等无线通信设备中,是工程用远程无线信号控制的理想选择。
YST121-04远程无线遥控开关板是利用两个对讲机传输DTMF编码信号,从而实现对设备远程控制的电子控制模块。该模块的控制信号是一串带有密码的控制指令,所以其传输的指令信号既安全又具有强的抗干扰能力。一块该开发板能控制远端4个开关量。在此设计中采用3块开发板控制,各开发板的控制指令能自定义。无线远程控制系统的原理如图4所示。

图4 无线控制系统原理图
图4中,对讲机1为本地遥控机,对讲机2为远端受控机。工作时,操作人员通过对讲机1发送DTMF码指令到对讲机2,对讲机2将信号传递给YST121-04开关板,开发板对信号进行确认分析后控制相应的继电器开和关,以实现对远程控制开关量的控制。
该远程无线控制方案开发成本较低。对讲机选用摩托罗拉或建伍等成熟品牌以提高信号传输的质量。
在地铁隧道内试验,用一台4 W的高功率摩托对讲机进行干扰。当接收端与发射端位于空旷隧道内时,在50和70 m的测试距离下都不存在干扰。当接收端与发射端中间有设备车 (金属屏蔽)时,测试结果如表1所示。

表1 干扰测试1
当接收端与发射端之间有钢筋混凝土墙阻挡,即拐弯处,同时中间又有设备车 (金属屏蔽)时,测试结果如表2所示。
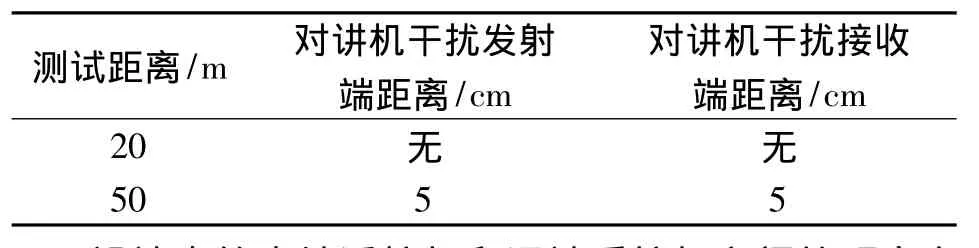
表2 干扰测试2
设计中的本地遥控机和远端受控机之间的距离在20 m范围以内。通过试验结果可知,其基本不受干扰机影响,满足设计要求。
4 结论
完成了一种新型地铁隧道刚性悬挂接触网安装施工中锚螺栓孔钻孔设备控制系统的设计,包括液压控制系统的设计、电路控制系统的设计以及远程无线控制系统的设计。采用机电液一体化的控制系统具有传动可靠、功率密度大、控制精确方便的特点。经过理论分析和初步的实验,该钻孔设备具有较高的稳定性、可靠性和自动化程度,为实际生产奠定了理论基础。
[1]初长红.TY型接触网作业车液压系统[J].太原科技,2002(4):39-40.
[2]李壮云.液压元件与系统[M].2版.北京:机械工业出版社,2005.
[3]侯云辉,刘志奇,卢菡涵,等.基于S7-200PLC技术的升降平台控制系统设计[J].液压气动与密封,2013(2):41-44.
[4]成文术,杨波.基于单片机技术的机车升降平台控制系统设计[J].机械工程与自动化,2010(4):152-156.
[5]单亚男,刘志奇,武宗才,等.接触网作业车自动控制作业平台的实现[J].液压与气动,2011(5):58-61.
[6]张文增.基于AVR嵌入式单片机的定时及远程控制系统[J].计算机光盘软件与应用,2011(1):153-154.
[7]张利平.液压传动系统及设计[M].北京:化学工业出版社,2005.
[8]孙骅,王业潘.新式轻巧型曲臂高空工程作业车液压控制系统的设计与分析[J].机床与液压,2010,38(14):31-34.
猜你喜欢
小天使·二年级语数英综合(2021年5期)2021-07-11
冶金设备(2020年2期)2020-12-28
重型机械(2020年2期)2020-07-24
电子制作(2019年22期)2020-01-14
电子制作(2017年17期)2017-12-18
大科技(2016年17期)2016-07-12
石油化工建设(2015年6期)2015-12-01
新课程学习·下(2015年2期)2015-10-21
橡胶工业(2015年5期)2015-08-29
机床与液压(2014年13期)2014-06-04