飞机防滑刹车系统滑移率自适应滑模控制研究
2015-02-22 01:47付龙飞田广来王鹏梁波皇甫宜耿
西北工业大学学报 2015年5期
关键词:飞机
付龙飞, 田广来, 王鹏, 梁波, 皇甫宜耿
(西北工业大学 自动化学院, 陕西 西安 710072)
飞机防滑刹车系统滑移率自适应滑模控制研究
付龙飞, 田广来, 王鹏, 梁波, 皇甫宜耿
(西北工业大学 自动化学院, 陕西 西安710072)
摘要:针对含有参数不确定的非线性系统,提出了一种自适应滑模控制(ASMC)算法。根据飞机地面滑跑特性的受力分析,建立了飞机防滑刹车系统(ABS)的地面动力学模型;通过对飞机防滑刹车系统模型的非线性分析,针对非线性系统的不确定参数提出了以双极性sigmoid函数为趋近函数的滑模控制(SMC)算法,并针对切换增益和边界层设计了自适应控制算法以减小滑模控制的抖振现象;最后采用李雅普诺夫理论分析了设计的自适应滑模算法的敛散性。 MATLAB仿真结果表明,自适应滑模控制算法相较于传统的滑模算法能在更短的时间内获取跑道的最大结合系数,达到最佳滑移率,缩短刹车时间。
关键词:飞机;防滑刹车;滑模控制;自适应控制;滑移率
飞机防滑刹车系统根据飞机轮胎与跑道表面的结合系数调节刹车压力实现飞机的防滑刹车。结合系数在飞机地面动力学系统中受跑道和轮胎的不确定特性以及起落架和滑移率的非线性影响,因此飞机ABS是含有不确定特性的非线性系统。通常,通过滑移率特性描述结合系数,当滑移率最优时,结合系数达到最大值,防滑刹车效率最高,但滑移率的最优值并不是固定值,它随飞机状态和跑道表面状态而变。
传统的控制策略对非线性系统具有无法克服的缺点,飞机ABS动力学系统的非线性特性要求控制策略必须解决系统的非线性问题。文献[1]基于飞机滑移速度使用压力偏调(PBM)的控制方法;文献[2]针对飞机全电刹车提出偏压PID的控制方法;上述方法是针对线性系统的控制方式。
飞机ABS具有非线性特点。文献[3]基于传统的PID控制提出了模糊算法,并通过仿真验证了飞机低速段的控制特性。滑模控制对不确定非线性具有较强的鲁棒性。文献[4-5]提出了基于最佳滑移率的非线性飞机ABS滑模控制。文献[6]研究了基于结合力的LuGre模型滑模控制,通过非线性观测器辨识结合力状态。针对切换函数产生的抖振,引入自适应律[7],在飞机ABS中取得了较好的效果。
本文针对参数不确定非线性系统,在文献[4]的基础上设计了基于滑模控制和自适应算法的自适应滑模控制器。根据飞机地面运动学方程,设计了基于滑移率的滑模控制算法;为了减小滑模控制产生的抖振现象,提出了一种新的针对切换增益的参数自适应算法。通过在飞机ABS中的仿真研究,验证了算法的有效性和合理性。
1飞机ABS地面运动模型
1.1飞机地面模型
飞机地面滑跑的受力分析如图1所示。
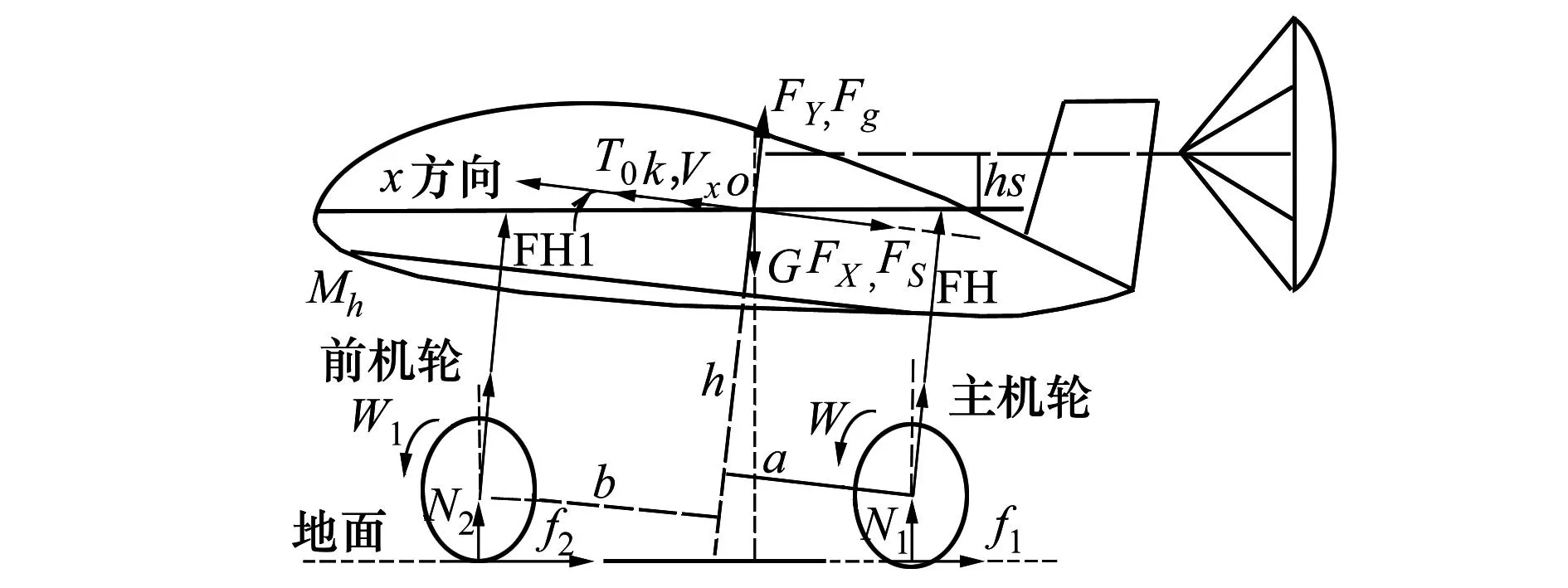
图1 飞机地面滑跑受力分析图
图1中对飞机滑跑模型的建立做了如下的假设:
A. 飞机机身和起落架被视为理想的刚体,不考虑弹性变形;
B. 不考虑地面运动中侧风的影响;
C. 以地面跑道为惯性坐标系。
根据牛顿定律和力矩平衡原理,建立飞机地面坐标系下动态方程,如下
(1)
式中参数及代表含义见文献[4]。
飞机地面滑跑主要考虑纵向受力,仿真建模中将飞机的升力和俯仰力矩视为定值。因此,(1)式简化为(2)式,将(2)式带入(1)式中,并取x1=VX,得(3)式。
(2)
(3)
1.2机轮动力模型
在飞机刹车仿真过程中,空气阻力、轮胎充气程度、轮胎型号等均影响轮胎动力学模型建立,文中采用简化的机轮受力示意图如图2所示[4]。
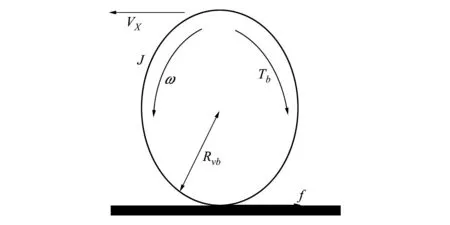
图2 机轮受力模型
刹车过程中刹车力作用与主机论上,主机轮刹车过程运动方程可描述如下
(4)
式中,Tj=Rvbf,Tb=kbPb。
机轮的动态半径表达式如下
(5)
将(1)式、(2)式和(5)式带入(4)式,并取x2=ω,得

(6)
(6)式中结合系数μ可描述为如下形式

(7)
飞机ABS控制器主要目的是滑移率维持最优状态,即结合系数的最大值。滑移率可描述为如下形式
(8)
2滑模控制器设计
考虑如下非线性系统
(9)
式中,x∈Rn是可测的状态矢量;u是控制输入;f(x)、g(x)和h(x)为已知的平滑非线性函数,且g(x)在x∈Rn内为满秩。
针对最佳滑移率的滑模控制器误差设计如e=σ-σd,并且选取如下滑模面
(10)
式中,σd是期望的滑移率。对(10)式描述的滑模面取微分得
(11)
(12)
3自适应滑模控制

(13)

(14)
(15)
(16)

(17)

从上述分析可知,(15)式和(16)式设计的自适应律保证Lyapunov函数V2半负定,在有限时间内收敛。
图3给出了飞机ABSASMC仿真模型示意图。飞机地面模型采用(3)式建立,机轮与地面间结合系数模型采用(7)式的机轮公式,滑移率采用(8)式建立。设计了ASMC调节刹车力矩,使系统的跟踪误差接近于0。

图3 飞机ABS ASMC仿真模型
4仿真验证
文中提出了针对不确定性非线性飞机ABS的AMSC最佳滑移率算法。使用MATLAB/Simulink仿真软件,仿真步长0.002s。仿真开始条件为飞机机轮接地后,即1.5s时;仿真终止条件为飞机速度小于5m/s。
不同控制律下飞机速度和机轮速度如图4所示。飞机速度和机轮不断随着各滑移率分别逐渐减小,图4a)为采用ASMC控制律曲线,图4b)为采用SMC控制律曲线。从图中可看出2种控制律下刹车时间分别为12.8s和14.2s,因此,ASMC可获得较好的刹车效果。不同控制律下结合系数的仿真结果如图5所示。从图5a)中可知,采用ASMC的结合系数很快达到实际结合系数且维持稳定;而图5b)中的结合系数为0.71且不断减小并含有抖振现象。滑移率仿真结果如图6所示,图6a)中的ASMC控制律下的滑移率能在较短的时间内达到最优值0.115,图6b)中的SMC控制律下的滑移率为0.068。在低速时由于飞机速度和机轮速度都趋近于0,造成了滑移率的波动较大。
不同控制律下结合系数曲线-滑移率如图7所示。在同一实验条件下,图7a)中ASMC控制时的结合系数大于图7b)中SMC控制时的结合系数,因此前者的滑移率优于后者,且滑移率和结合系数达到了预期目标值。
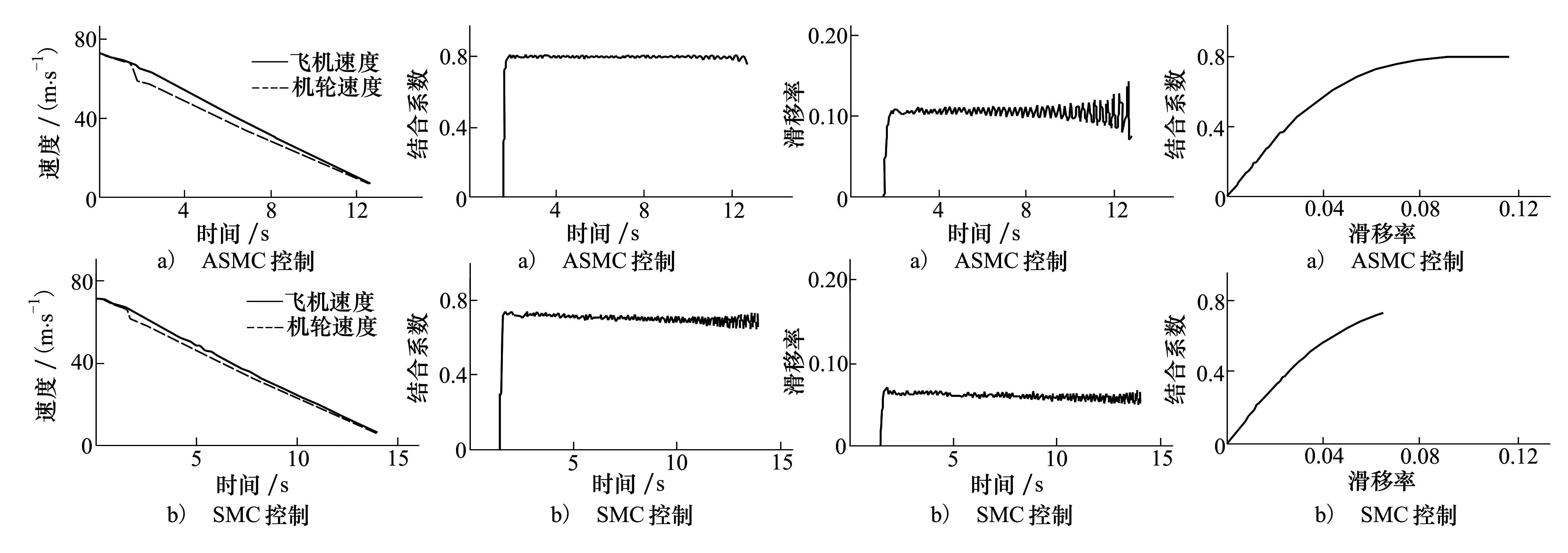
图4 不同控制律下飞机 图5 不同控制律 图6 不同控制律图7 不同控制的结合 速度和机轮速度 下结合系数 的滑移率 系数-滑移率关系
5结论
文中讨论了非线性系统的参数不确定和非线性特性,使用理论分析和数学仿真的方式研究飞机ABS。设计了飞机ABS的SMC算法,完成最优滑移率的调节;为改善SMC算法对不确定参数的适应和抖振现象,提出了基于切换增益和边界层厚度的参数自适应调节算法,完成了飞机ABS的ASMC控制律的设计。仿真结果表明,基于ASMC的飞机ABS具有缩短刹车过程,提高刹车效率,实现滑移率的最优控制。
参考文献:
[1]李玉忍,马瑞卿,薛晶,等. 飞机防滑刹车系统的变结构控制研究[J]. 西北工业大学学报,2008, 26(6):752-755
LiYuren,MaRuiqing,XueJing,etal.ImprovingVariableStructureControlofAircraftAnti-SkidBrakeSystem[J].JournalofNorthwesternPolytechnicalUniversity, 2008, 26(6): 752-755 (inChinese)
[2]BoLiang,LiYuren.ResearchonSimulationofAircraftElectricBrakingSystem[C]//CSIE2011: 301-309
[3]王平军,侯波. 基于模糊PID的飞机防滑刹车系统动态仿真[J]. 计算机仿真,2012,29(2):40-44
WangPingjun,HouBo.DynamicSimulationofAircraftAnti-SkidBrakingSystemBasedonFuzzyPIDControl[J].ComputerSimulation,2012,29(2):40-44 (inChinese)
[4]付龙飞,田广来,李玉忍,等. 反馈线性化飞机防滑刹车滑模变结构控制律研究[J]. 西北工业大学学报,2013, 31(6): 962-966
FuLongfei,TianGuanglai,LiYuren,etal.DesigninganEffectiveSlidingModeVariableStructureControlLawwithFeedbackLinearizationofAircraftAnti-SkidBrakingSystem[J].JournalofNorthwesternPolytechnicalUniversity, 2013, 31(6): 962-966 (inChinese)
[5]李波,焦宗夏. 基于广义卡尔曼滤波的飞机防滑刹车变结构控制[J]. 系统仿真学报,2007, 19(3): 585-588
LiBo,JiaoZongxia.AircraftAnti-SkidBrakingVariableStructureControlBasedonGeneralizedKalmanFilter[J].JournalofSystemSimulation, 2007, 19(3): 585-288 (inChinese)
[6]谢利理,刘丽卓,郑新华,等. 基于LuGre模型的飞机制动系统滑模控制[J]. 华中科技大学学报:自然科学版,2013(6): 65-69
XieLili,LiuLizhuo,ZhengXinhua,etal.SlidingModeControlofAircraftBrakingSystemBasedonLuGreModel[J].JHuazhongUnivofSci&Tech:NaturalScienceEdition, 2013(6): 62-69 (inChinese)
[7]李丰羽,焦宗夏. 基于结合力模型的自适应飞机防滑刹车控制[J]. 北京航空航天大学学报,2013,39(4): 447-452

《机械科学与技术》第34卷第10期(2015年10月)全部论文
30篇平均每篇有2001年以后的Ei主题词2.37个
《机械科学与技术》2015年10月这一期共有论文30篇:Ei主题词11个的1篇,6个的2篇,3个的4篇,4个的3篇,2个的7篇,1个的10篇,0个的3篇。30篇共有Ei主题词71个,平均每篇2.37个(71÷30)。
胡沛泉
2015年10月
LiFengyu,JiaoZongxia.AdaptiveControlforAircraftAnti-SkidBrakingSystemBasedonFrictionForceModel[J].JournalofBeijingUniversityofAeronauticsandAstronautics, 2013, 39(4): 447-452 (inChinese)
Adaptive Sliding Mode Control Strategy for the Aircraft
Antiskid Braking System Based on Slip Ratio
Fu Longfei, Tian Guanglai, Wang Peng, Liang Bo, Huangfu Yigeng
(Department of Automatic Control, Northwestern Polytechnical University, Xi′an 710072, China)
Abstract:An adaptive sliding mode control (ASMC) algorithm was proposed to control the nonlinear system with parameter uncertainty. The complex characteristics of aircraft antiskid braking system (ABS) were analyzed. According to uncertainty about the system, a sliding mode control (SMC) algorithm was presented with bipolar sigmoid function reaching law. The sliding mode gain factor and boundary layer were discussed and its adaptive algorithm was designed in order to decrease the chattering. The convergence of the ASMC algorithm was analyzed with Lyapunov theory at last. The results from simulation indicate that ASMC strategy, compared with the traditional SMC strategy, makes the ABS obtain the maximum friction coefficient in a shorter time. Additionally it is shown that the system works under optimal slip ratio and shortens the braking time.
Key words:aircraft, anti-skid braking, sliding mode control, adaptive control systems, Lyapunov functions, slip ratio, controllers, convergence of numerical methods, MATLAB
中图分类号:V226
文献标志码:A
文章编号:1000-2758(2015)05-0770-05
作者简介:付龙飞(1985—),西北工业大学博士研究生,主要从事飞机防滑刹车系统研究。
基金项目:陕西省国际科技合作重点项目计划(20121203202758)资助
收稿日期:2015-04-16
猜你喜欢
青少年科技博览(中学版)(2022年6期)2022-08-31
小哥白尼(军事科学)(2022年3期)2022-06-09
环球时报(2022-05-30)2022-05-30
小哥白尼(趣味科学)(2020年12期)2021-01-18
民用飞机设计与研究(2020年4期)2020-11-27
青少年科技博览(中学版)(2020年2期)2020-05-21
当代陕西(2019年11期)2019-06-24
百科探秘·航空航天(2017年11期)2017-12-20
百科探秘·航空航天(2017年12期)2017-08-15
作文周刊·小学一年级版(2017年9期)2017-06-20