
基于车道线的前方车辆检测方法研究
2015-02-18 01:29贾世杰刘金环于梦晗祁晓婷
大连交通大学学报 2015年5期
贾世杰,刘金环,于梦晗,祁晓婷
(大连交通大学 电气信息学院,辽宁 大连 116028)*
0 引言
目前,随着汽车的普及,汽车的安全辅助驾驶已经成为国内外研究的焦点.其中前方车辆的检测是汽车智能辅助驾驶系统的一个关键部分[1].通过视觉获得前方车辆的信息是目前智能车辆研究的重点和热点.基于视觉的前方车辆检测方法很多,大部分方法都是在整幅图像中进行车辆检测,但在复杂场景中,背景会对车辆的检测产生干扰.实际上,在检测前方车辆的过程中,只需要检测本车所在车道内行驶的前方车辆,而不用去检测本车道以外的范围,因此,可以通过检测车道线来确定检测车辆的搜索范围,而不需要获取整个图片的所有信息,这样不仅大大降低了运算量,缩短了检测的时间,也排除了本车道以外的无关区域中的各种干扰信息对车辆检测的不利影响,提高了检测车辆的正确率.因此,本文提出了基于车道线的前方车辆检测方法,在检测出车道线的基础上,利用车辆底部阴影特征来搜索前方车辆.本文算法整体流程图如图1所示.

图1 算法流程图
1 基于Hough变换的车道线检测
目前,Hough变换是车道线检测方法中应用最为广泛的方法之一,其基本思想是点与线的对偶性[2],即图像空间中的每一个点对应于参数空间中的一条直线,同一条直线上的所有点所对应的参数空间中的直线相交于一点,从而将图像中的直线变换到参数空间的聚集点.基于Hough变换的车道线检测基本过程如下.
1.1 设置感兴趣区域(ROI)
根据所采集的图像观察可知,图像上边1/3部分多为天空等无关信息,为了能减少运算量提高运行速度,本文只对图像下面2/3部分进行计算,因此本文将图像的下面2/3部分作为感兴趣区域(ROI,Regin of Interesting)来提高系统的实时性.
1.2 图像预处理
将RGB彩色图像转变为灰度图像,然后进行边缘检测.Hough变换检测的效果直接受边缘检测的准确性的影响.本文首先采用Otsu算法[3]进行分割,这样可以根据灰度化后的图像信息自适应的产生阈值对图像进行二值化,将车道从背景中分离出来,避免了人为设定阈值的难题.然后采用Sobel算子进行边缘检测.Sobel算子计算量小,算法简单,在边缘增强效果、抑制噪声能力方面都比较好,但提取的边缘较粗.图像预处理效果如图2所示.

图2 图像预处理
1.3 检测车道线
在基于车载系统的道路视频图像中,两条车道线分别分布在图像中心线的两侧,其角度在一定范围内变化.因此建立车道线模型[4]如图3所示.由于左右车道线的位置基本固定在一定的范围内,θ1的取值范围为30°~ 70°.对于模型 a,θ2的取值为 -20°~-70°;对于模型b,θ2的取值为110°~ 160°,可将 θ2的取值统一为110°~ 160°.这样设置后Hough变换的计算量仅为之前的一半[5],也减少了干扰的直线,提高了正确率.
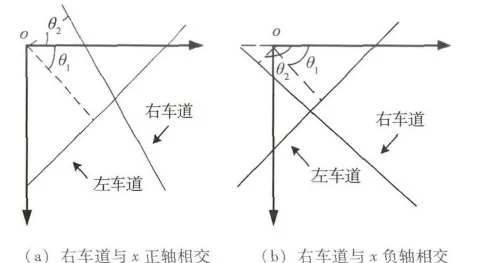
图3 车道直线的极坐标模型
Hough变换检测车道线的具体步骤如下:
(1)搜索预处理后图像空间中的白色像素;
(2)将检测到的白色像素点(xi,yi)转换到极坐标空间,坐标方程是ρ=xicosθ+yisinθ,采用左车道 θ∈ (30,70),右车道 θ∈ (110,160),其中ρ代表原点到直线的距离,θ代表直线与水平轴的夹角;
(3)在极坐标空间中,对(ρ,θ)单元进行投票累加,即 H(ρ,θ)=H(ρ,θ)+1 .找到 H(ρ,θ)的局部最大值,对满足(ρ,θ)的边缘点进行标注;
(4)最后,根据边缘点在该方向上的稠密度来判断该直线是否为真.
根据上述步骤可知,Hough变换就是将图像预处理后的图像中的边缘点转换到极坐标空间的累加阵列的多个单元中,然后计算各单元的累加值以获得局部极值,从而检测出车道线.
2 前方运动车辆的检测
本车所在车道区域通过上面车道线的检测已经确定,下面就在所确定的ROI即两车道线内搜索前方车辆.通过观察视频图像可以发现,在正常光照的白天中,在道路表面无遮挡物阴影的环境下,车辆底部会在道路上产生阴影,道路区域的灰度值要比车底阴影区域的灰度值高一些,因此在道路与阴影的交界处会产生阶跃性边缘,灰度会产生突变,其特征较为明显[6],将灰度化后的图像进行Sobel边缘检测后,在车辆底部将有一条较为明显的边缘.针对这种情况,本文分为两步进行车辆检测,第一步是根据车辆底部阴影特征进行水平边缘检测,第二步是根据车辆的对称性进一步确认车辆位置.
2.1 检测水平边缘
分别在灰度化后的图像和边缘检测后的图像的ROI内,从下到上,从左到右依次逐点扫描每一个像素.找到水平边缘的起点位置Pstart(x,y)和终点位置Pend(x,y).边缘点必须同时满足这两个条件,即在灰度化的图像中灰度值小于100,在边缘检测后的图像中大于50时,则判定该像素点是边缘点.在逐点扫描过程中,水平边缘不能断,其线段长度达到一定长度时,方可假设它为车辆底部阴影.
2.2 基于对称性的车辆验证
确定车辆底部后,可根据车辆的对称性进一步确定车辆的位置,从而提高车辆检测的正确性.车辆的垂直边缘具有严格的对称性,且不易受外界环境影响,具有较强的稳定性和明显性[8].因此本文根据车辆的垂直边缘的对称性进一步验证车辆.
采用Sobel垂直边缘检测得到垂直边缘增强图像,在此基础上,计算垂直边缘的对称性测度.为减少运算量,本文将车辆假设矩形框,其列方向上垂直边缘投影均值视为横坐标的一维函数g(x):

式中:s(x,y)为边缘检测后像素点(x,y)处的垂直边缘值,ystart和yend分别为车辆假设矩形局域的上、下边界.
任意函数都可以写成奇函数和偶函数之和的形式,并且其对称的程度可以由二者权重的相对大小反映出来[9].设对称轴的水平位置为矩形区域的数直中轴xs=(xstart+xend)/2,矩形框的宽w=xend-xstart.建立以 xs为原点的新坐标系u(-w/2≤u≤w/2),则x和u的变换关系为:

对于一定的w和xs,函数g(x)=g(xs=u)的奇函数分量和偶函数分量分别为:
奇函数分量 O(u,xs)的均值为零,偶函数E(u,xs)>0,其均值大于0,因此要将偶分量进行归一化处理,使其均值为零,可得:

因此,可得二者的能量函数分别为:

利用能量函数对矩形区域的对称度测量为:

测度s的范围为[-1,1],当s=1表示目标完全对称,s=-1时,表示目标完全不对称,参数xs、w与测度是相互对应的.
由于在路面和背景中也有可能存在对称性,只通过测量目标的垂直边缘对称性会产生一定的误差.车辆的纹理相对于路面的纹理要复杂,可以根据这一特征用信息熵值的对称性测度[10]来进一步验证目标.
设灰度图像中的灰度级为0-255,其信息熵的表达式为:

图像区域的信息熵的值越大,表示信息量越丰富,对于本文所处理的灰度图像来说,则说明区域纹理特征越明显,车辆存在的可能性就越大.H(l)的可能取值为[0,5.545],本文将阈值设置为3,即当H(l)大于等于3时,认为目标区域包含车辆.
3 基于卡尔曼滤波的前方车辆跟踪
卡尔曼滤波即Kalman滤波,是一种递推线性最小方差估计,它对环境的平稳性不做要求,只要确保其正交性原理成立,就能快速的递推出最优解.目前,它是解决目标跟踪问题最广泛应用的方法之一.
本文采用卡尔曼滤波的方法对前方运动车辆进行跟踪.Kalman滤波器根据当前所检测目标的状态值,利用递推方法和状态方程估计目标的下一状态值,不仅缩小了目标的搜索范围,提高了检测的正确率,而且解决了目标短暂性消失的这一问题,也解决了对连续视频帧中同一目标的重复检测问题,提高了整个系统的效率.
4 实验及结果分析
为了验证算法的有效性,本文在配置了1.80 GHz CPU Intel(R)Core(TM)i7,8.0 GB 内存和windows 8操作系统的计算机上,采用VS2013平台和开源计算机视觉库OpenCV,实现了本文算法,并分别对晴天和阴天情况下的两段交通视频进行车辆检测实验,所处理视频的分辨率为856×480,帧速为30帧/s.前方车辆检测结果示例如图4所示,视频车辆检测结果如表1.
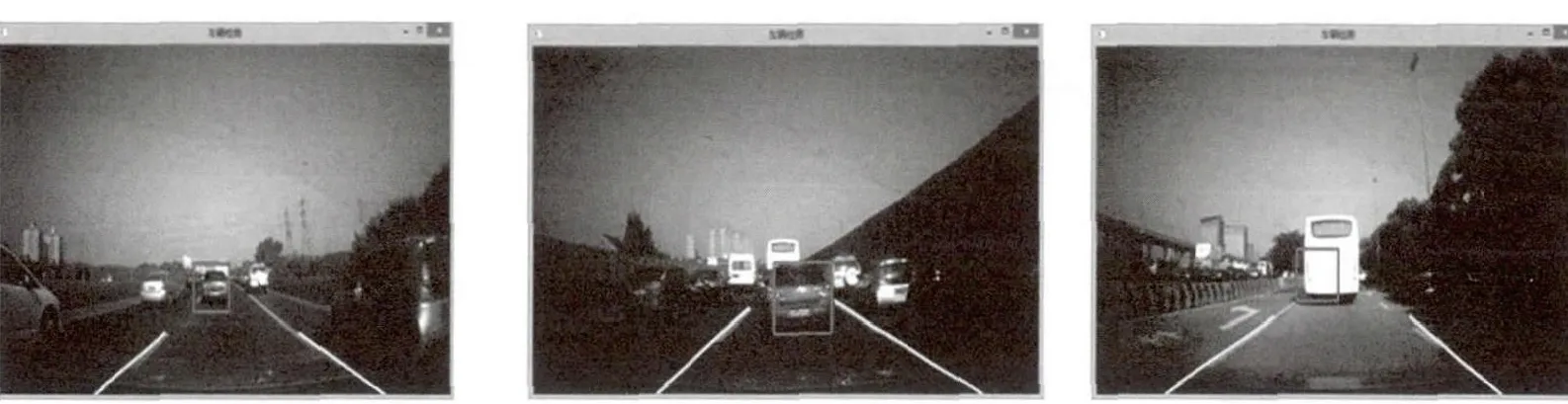
图4 前方车辆检测结果示例

表1 视频车辆检测结果
实验结果表明,本文的算法能够比较稳定准确的检测出车辆,通过Kalman滤波进行车辆跟踪能够显著提高检测速度.
5 结论
本文提出了一种基于车道线的车辆检测跟踪方法,利用改进的Hough变换检测车道线,缩小了检测车辆的区域.然后,采用基于梯度特征的车底部阴影检测算法初步定位车辆,利用车辆的边缘对称性进一步验证车辆的位置,提高了系统的健壮性.最后,使用Kalman滤波预测产生新的车辆区域,增强了系统的检测效率.但当车道线检测有误时,会直接影响到检测车辆的正确性,这是今后进一步要解决的问题.
[1]鲁威威,肖志涛,雷美琳.基于单目视觉的前方车辆检测与测距方法研究[J].电视技术,2011,35(1):125-128.
[2]HOUGH P V C.Method and means for recognizing complex patterns:U.S.,3,069,654[P].1962-12-18.
[3]吴一全,潘喆.2维最大类间平均离差阈值选取快速递推算法[J].中国图象图形学报,2009(3):471-476.
[4]李明,黄华,夏建刚.基于Hough变换的车道检测改进算法研究[J].计算机工程与设计,2012,33(4):1638-1642.
[5]JIA XIN.Study on lane recognition method of intelligent vehicle visual detection[D].Changchun:Jilin University PhD Thesis,2008.
[6]RIEHARD B.Hitelligent vehicle applications world wide[J].IEEE Intelligent Systems,2000,15(1):78-80.
[7]潘燕.基于车载摄像头的前方运动车辆检测与跟踪方法研究[D].安徽:合肥工业大学,2012.
[8]齐美彬,潘燕,张银霞.基于车底阴影的前方运动车辆检测[J].电子测量与仪器学报,2012,26(1):54-59.
[9]施树明,储江伟,李斌,等.基于单目视觉的前方车辆探测方法[J].农业机械学报,2004,35(4):5-8.
[10]史忠科,曹力.交通图像检测与分析[M].北京:科学出版社,2007:212-215.
[13]张建明,张玲增,刘志强.一种结合多特征的前方车辆检测与跟踪方法[J].计算机工程与应用,2011,47(5):220-223.
[14]林丽晨.基于车载摄像机高速公路车距测量系统的研究[D].天津:天津大学,2005.
猜你喜欢
数学物理学报(2022年4期)2022-08-22
北京航空航天大学学报(2022年6期)2022-07-02
卫星应用(2021年11期)2022-01-19
中学生数理化·中考版(2021年10期)2021-11-22
昆明医科大学学报(2021年8期)2021-08-13
科学大众(2021年9期)2021-07-16
天津医科大学学报(2021年1期)2021-01-26
中国交通信息化(2020年11期)2021-01-14
自动化学报(2017年5期)2017-05-14
光学精密工程(2016年1期)2016-11-07
