基于ADAMS的牛头刨床导杆机构仿真研究
2015-02-02 02:05肖志余
武汉工程职业技术学院学报 2015年4期
肖志余 钱 坤
(1.武汉软件工程职业学院 湖北 武汉:430205; 2.湖北工业大学机械工程学院 湖北 武汉:430068)
基于ADAMS的牛头刨床导杆机构仿真研究
肖志余1钱坤2
(1.武汉软件工程职业学院湖北武汉:430205; 2.湖北工业大学机械工程学院湖北武汉:430068)
摘要通过简化牛头刨床的导杆机构,建立了虚拟三维几何机械运动学模型和动力学模型,分析了牛头刨床导杆机构进行运动学和动力学特点,并对其进行仿真研究,揭示了牛头刨床导杆机构的运动规律及受力情况,得到了各部件随时间的位移、速度、加速度的变化曲线,为机构的设计提供理论指导及技术支持。
关键词导杆机构;运动学;动力学;虚拟样机
牛头刨床是现阶段我国工业生产中的重要加工设备,其导杆机构工作原理可简化为曲柄摇杆机构带动刨块做往复运动。刨块进行刨削加工时缓慢前行,然后快速空载复位。因此,刨块在刨削过程中存在一个急回的动作[1],所以在设计牛头刨床过程中需要其在满足日常加工的同时能够平稳工作,避免出现较大颤振和卡顿。随着现代科学技术发展,在机械设计中各种CAE软件也迅猛发展,为设计提供理论支持。钱文婷等人通过矢量法建立牛头刨床导杆机构的数学模型,运用MATLAB/SIMULINK进行了运动学和动力学仿真,分析了其导杆机构的运动特性[2]。赵玉成等人运用pro/mechanism对牛头刨床导杆机构进行了动态分析,分析了导杆机构的受力情况[3-4]。本文使用ADAMS软件建立牛头刨床导杆机构的运动学和动力学模型,运用虚拟样机模拟仿真牛头刨床在一次刨削过程中的运动与受力情况,通过输出曲线为牛头刨床的设计提供一定的设计指导,提前发现各种设计缺陷,提高设计的效率。
1导杆机构的运动学与动力学数学模型的建立
1.1运动学模型的建立
如图1,以C点为坐标原点建立直角坐标系,把各杆件当作矢量杆,标出个杆件的摆角,可得以下矢量方程:
l6+l1=s3
l3+l4=l6+sE
把两式分别投影在两坐标轴上:
l1cosθ1=s3cosθ3
l6+l1=s3cosθ3
l3cosθ3+l4cosθ4=sE
l3sinθ3+l4sinθ4=l6
联立上面各式就能求解位移量s3及刨块的位移量sE及摆角θ3、θ4,求解得刨块的位移量及摆角:
sE=l3cosθ3+l4cosθ4
θ3=cos-1(l1cosθ1/s3)
根据高等数学知识将上式的位移及摆角对时间求倒数可得到速度
如果再把上式对时间求导就能得到加速度aE及角加速度。
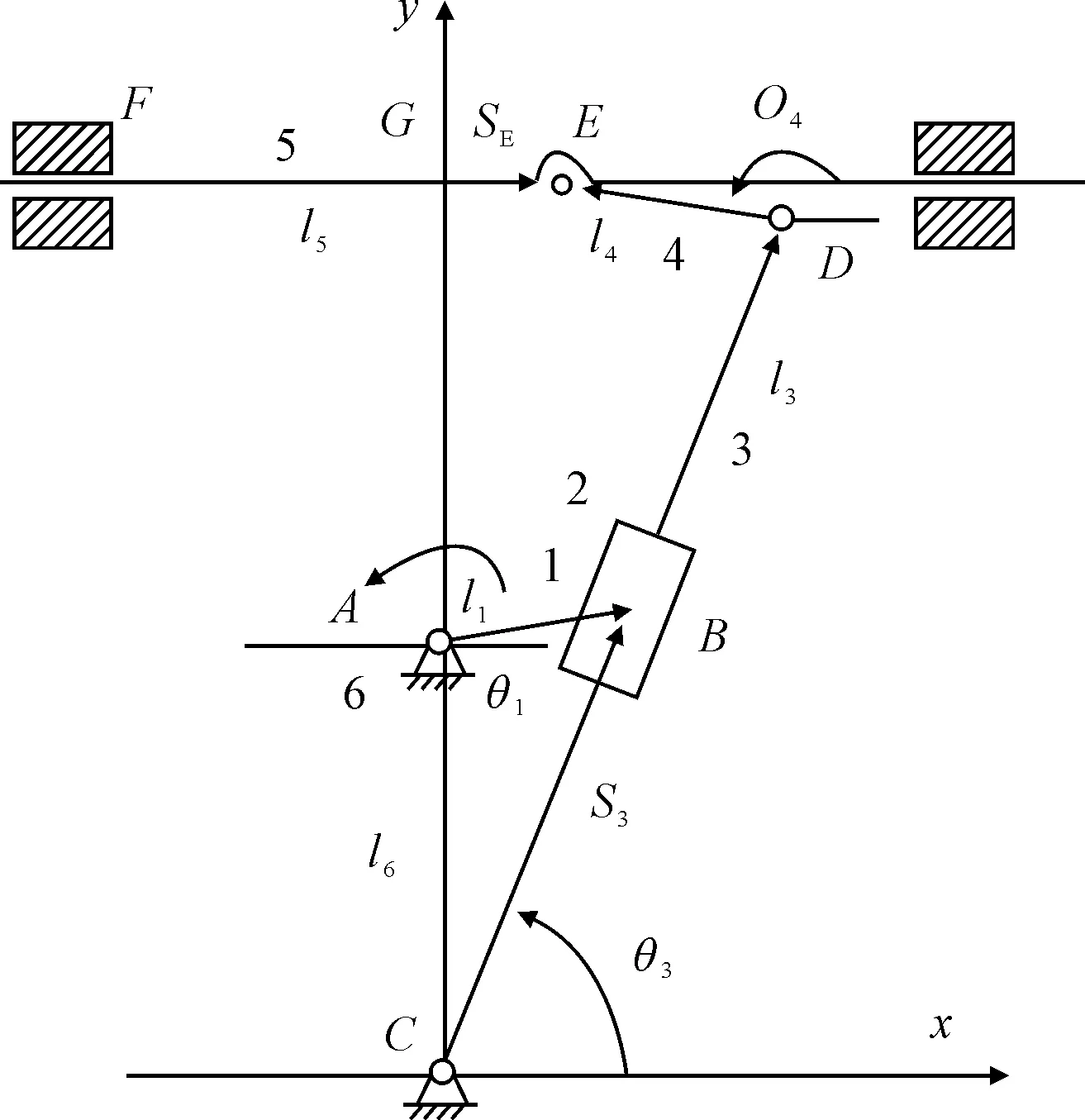
图1 导杆机构运动简图
1.2动力学模型的建立
通过前面的运动学模型,可以求出导杆机构各构件的加速度,进而可以可以求出各构件的惯性力和惯性力矩。假设各构件的质量为mi,所受的惯性力为Fi,惯性力矩为Mi,转动惯量为Ji,通过图1对导杆机构进行受理分析从而可得下列式子[5]
F5=-M5aE
其中a,σ分别为线加速度和角加速度。ax为构件沿x轴方向的加速度,ay为构件沿y轴方向的加速度。因此,可以列出每一个构件受力及力矩的平衡方程式。
2ADAMS建模与仿真
2.1建模
根据现有牛头刨床的导杆机构尺寸,已知AB=100 mm,AC=200 mm,DC=500 mm,DE=200 mm,滑块轨道偏心距e=300 mm。利用CAXA电子图版作出各构件的位置,从而求出各点的坐标位置[6]。

表1 关键点坐标
ADAMS本身自带有建模功能,但是对于牛头刨床一类的机械机构相对比较复杂的机床,利用ADAMS自身的建模功能建立这个模型存在一定难度,由于本文只针对牛头刨床导杆机构进行分析,因此我们可以简化其导杆机构模型。启动ADAMS软件,设置好模型名称,单位等工作环境。机架AC可以不用创建杆件,确定好各关键点的位置,创建好杆件和刨块模型,通过建模工具按钮建立如图2导杆机构的几何模型。
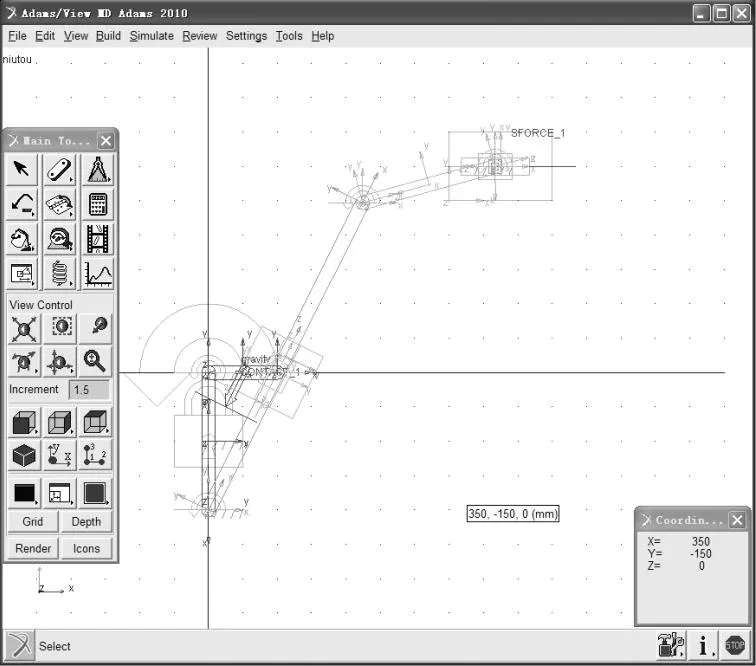
图2 几何建模
2.2添加运动副与驱动
根据ADAMS的设置与实际工况的要求,AB与CD杆与机架之间为旋转副,CD与DE杆之间也为旋转副,AB与CD杆之间也为旋转副,AB与滑块和DE与滑块之间为旋转副,CD与滑块之间为移动副,刨块与大地之间也为移动副,设置好各构件质量和转动惯量。假设刨块在工作时受到的阻力为5000N,设置好受力大小及受理方向。选择旋转驱动按钮,设置角速度为60 rad/s,将驱动添加在铰链A处。选择仿真工具按钮,输入仿真时长为6s,仿真步长为200步,完成导杆机构的建模与约束的添加工作。进入后处理模块获取刨头的行程,速度,加速度及受力情况。
3后处理仿真曲线分析
通过前面的建模及仿真,ADAMS后处理模块可以得到刨块的位移、速度、加速度曲线,如图3所示。从图3中可以看到,刨块的位移曲线大致呈正弦曲线,其最大位移为450mm,最小位移为-50mm,行程为500mm,符合设计的预期行程。在3.5s到5.5s之间,刨块基本走完一个行程,这说明在这2s内是刨块的一个急回过程,0s到3.5s为刨块的工作行程。根据速度曲线可以看出在0s到3.2s之间,刨块速度为负值,这段时间为刨块工作时间,刨块速度变化相对比较平缓,这就保证了刨块工作时速度的平稳性,为加工质量提供了保障,能够达到预期设计的工作状态。在3.2s到4.5s之间,速度有个迅速提高的过程,这段时间为刨块回程,速度升高,节约回程时间。通过加速度曲线,可以看到加速度最大值amax=701.24mm/s2,加速度最小值为amin=177.83mm/s2,在速度急速上升的时候加速度曲线也有个陡升的趋势。这也说明了机构在空行程的时候有一个急回的过程,从而保证了其生产效率。
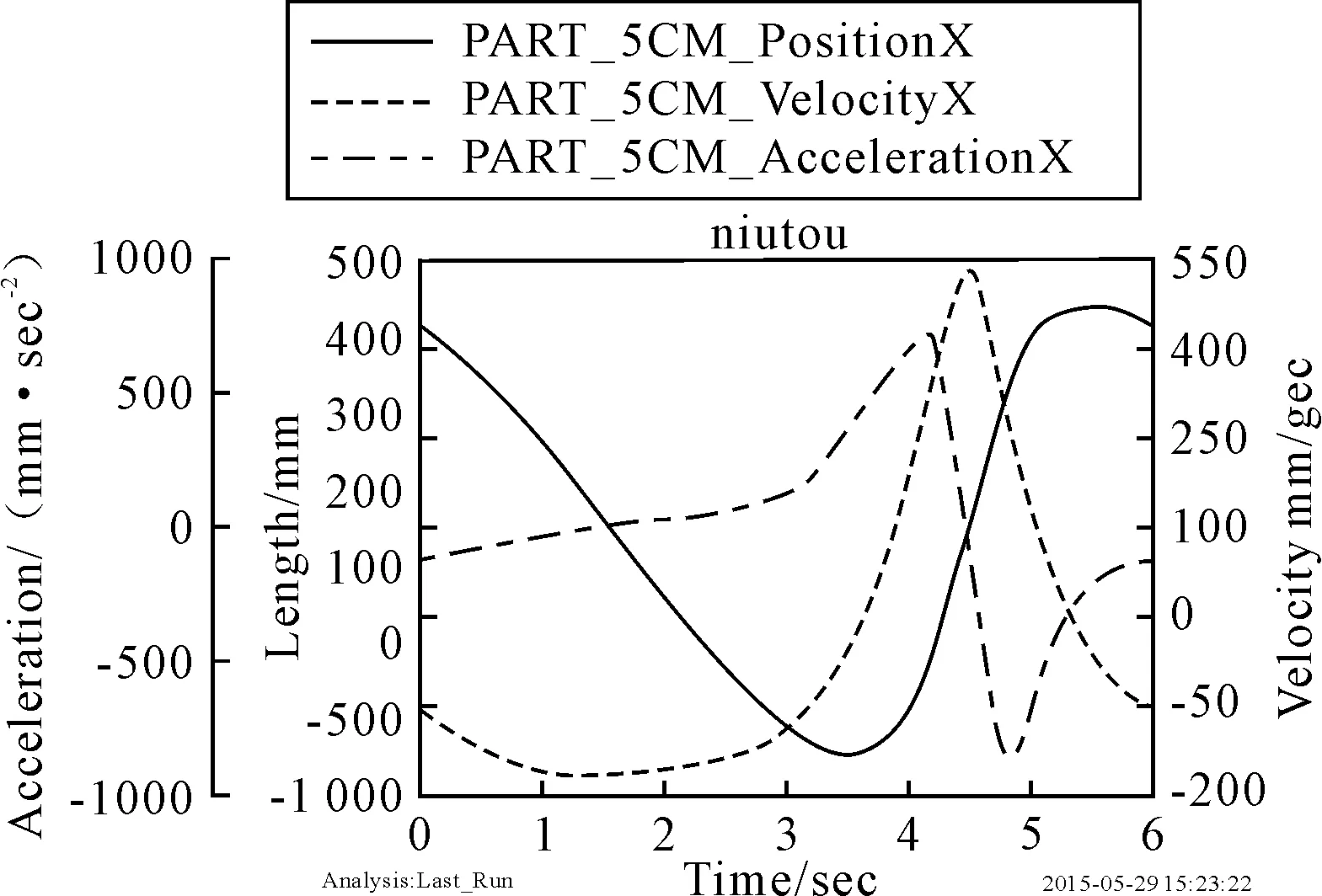
1-刨块位移曲线图;2-刨块速度曲线图;3-刨块加速度曲线图图3 刨块运动曲线图
如图4所示,为导杆的角速度和角加速度曲线图,从图4中可得导杆角速度在3.5s之后有个负方向的陡升过程,对应着刨块回程的速度曲线,同时导杆角速度和角加速度曲线图与图3中的刨块的速度和加速度曲线图基本是对应的,这也验证了牛头刨床的急回特性,说明了虚拟样机仿真模拟的正确性。

1-导杆角速度曲线图;2-导杆角加速度曲线图图4 导杆运动曲线图
如图5和图6分别为A点处约束副所受的约束反力和曲柄的平衡力矩Md随时间变化曲线,通过曲线可知,在进行切削过程中,水平x轴方向所受的力比竖直y轴方向的力平缓一些,这是因为在加工过程中由于在y轴方向振动相对大一些。同时可以发现在x轴方向受力明显大于y轴方向,这是因为刨床在加工时所受的阻力主要来自于x轴方向。通过图6所示,平衡力矩Md在切削过程中变化平稳,且变化很小,但是在回程过程中由于存在一个加速过程,所需力矩增大,所以曲线有个上升的过程,这也间接说明了牛头刨床存在着急回运动。通过以上曲线,揭露了牛头刨床导杆机构运动的基本特征,为其机构的设计提供了理论上的指导与参考。
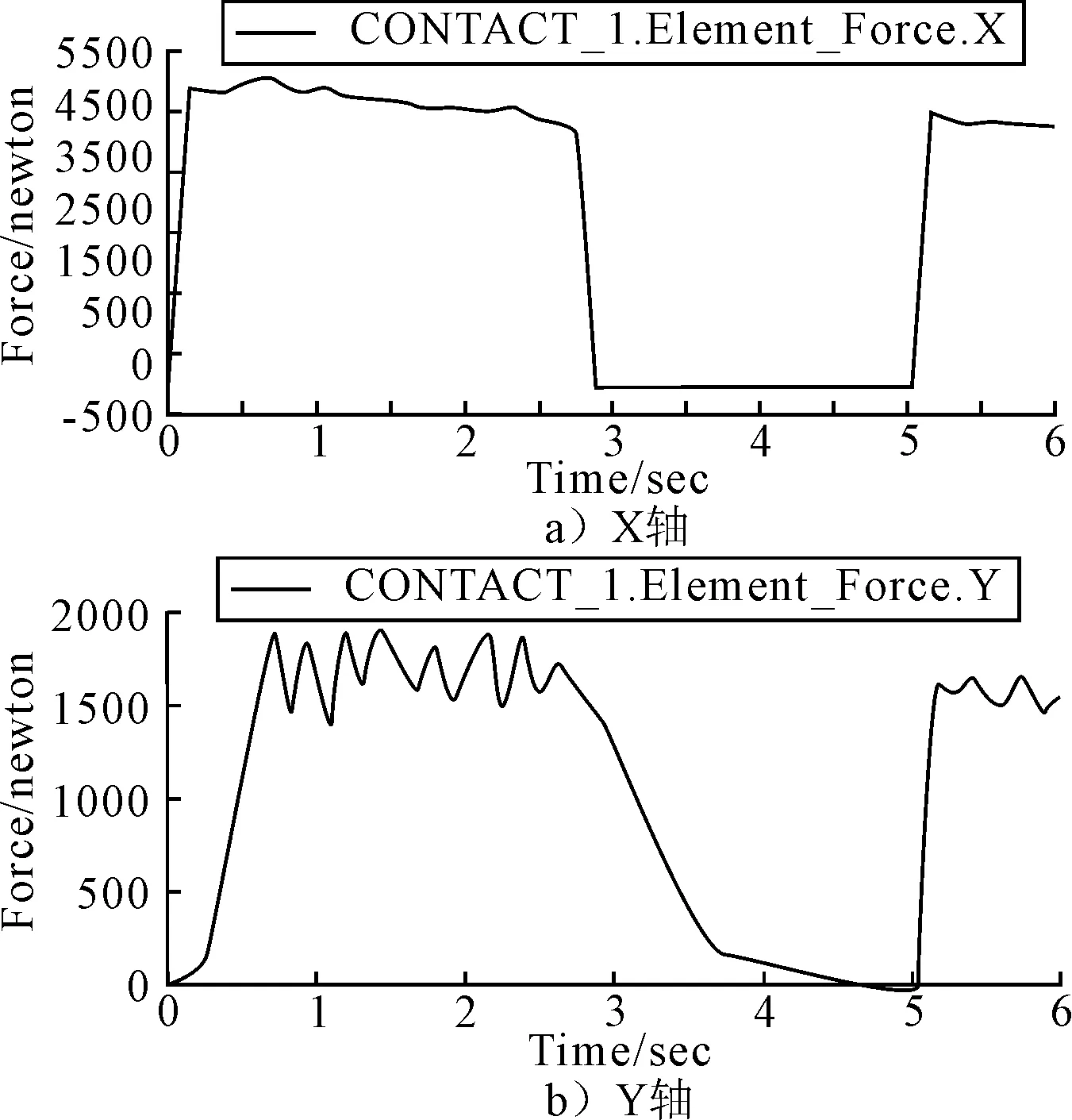
图5 A处约束副受力随时间变化曲线
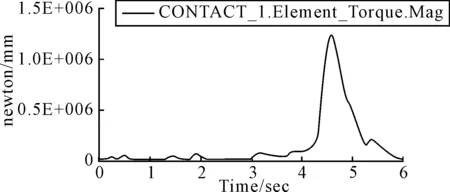
图6 曲柄平衡力矩随时间变化曲线
4结论
本文通过简化牛头刨床的导杆机构,运用ADAMS软件建立导杆机构虚拟样机运动学模型和动力学模型,分析其导杆机构的运动规律及关键部件受力情况,发现牛头刨床刨块在工作行程时,速度平稳,加速度值较小,而在空行程时,为节约时间,提高生产效率,刨块速度和加速度都有一个突变过程,验证了牛头刨床的急回特性,与实际运行情况相符合;通过动力学曲线,表明刨块的阻力及曲柄的力矩在刨块速度突变时所需的力矩也是增大的;通过虚拟样机的模拟仿真,为牛头刨床的设计提供了理论上的指导,同时节约了设计成本,缩短了开发周期。
参考文献
[1]顾维邦.金属切削机床概论[M].北京:机械工业出版社,2001.
[2]钱文婷,徐承妍,李滨城.基于MATLAB/SIMULINK的牛头刨床导杆机构运动学及动力学分析[J].制造业自动化,2011,33(2):105-107.
[3]赵玉成,顿文涛,李勉,等.基于Pro/E的牛头刨床六杆机构的动态仿真分析[J].河南农业大学学报,2014,48(1):66-70.
[4]马成习.基于Pro/E的牛头刨床运动机构建模及其运动仿真分析[J].机械设计与制造,2008,(10):182-183.
[5]孙桓.机械原理[M].北京:高等教育出版社,2006.
[6]高广娣.典型机械机构ADAMS仿真应用[M].北京:电子工业出版社,2013.
(责任编辑:李文英)
Simulation Study of Planer Guide Mechanism Based on ADAMS
XIAO Zhiyu1QIAN kun2
(1.Wuhan Vocational College of Software and Engineering, Wuhan 430205, Hubei;
2.School of Mechanical Engineering, Hubei University
of Technology, Wuhan 430068, Hubei)
Abstract:Through simplifying the planer guide rod mechanism, the researchers of this paper establish the three-dimensional geometric mechanical kinematic and dynamic models to analyze the shaper guide rod mechanism kinematics and dynamics characteristics. And its simulation study covers the movement pattern, strength performance of planer guide rod mechanism, and various components of displacement, velocity, acceleration curve over time, providing theoretical guidance and technical support for the design of mechanism.
Key words:guide rod mechanism; kinematics; kinetics; virtual prototype
作者简介:肖志余(1982~),女,硕士,讲师.E-mail: 370925460@qq.com
收稿日期:2015-10-27
中图分类号:TP391.9
文献标识码:A
文章编号:1671-3524(2015)04-0044-03
猜你喜欢
空气动力学学报(2022年4期)2022-08-23
北京航空航天大学学报(2022年7期)2022-08-06
黑龙江大学自然科学学报(2022年1期)2022-03-29
河北省科学院学报(2020年1期)2020-05-25
电子制作(2019年15期)2019-08-27
制造技术与机床(2018年11期)2018-11-23
中国塑料(2016年5期)2016-04-16
智能系统学报(2015年4期)2015-12-27
海军航空大学学报(2015年1期)2015-11-11
浙江大学学报(工学版)(2015年2期)2015-05-30