
基于51单片机的三自由度气动机械手控制系统的设计
2015-01-27 01:30陈林祥王正初
机电产品开发与创新 2015年1期
陈林祥,王正初
(台州学院 机械工程学院,浙江 台州 318000)
0 引言
机械手是在自动化生产过程中使用的一种具有抓取和移动工件功能的自动化装置,是在机械化、自动化生产过程中发展起来的一种新型装置。机械手是近些年发展起来的一种高端科技自动化生产设备,是工业机器人的一个重要分支。它的特点是可以通过编程来完成各种预期的作业任务,在构造和性能上兼有人和机器各自的优点。机械手能代替人类完成危险、重复枯燥的工作,减轻人类劳动强度,提高劳动生产率。近年来,机械手已受到许多部门的重视,并越来越广泛地得到应用,特别在机械行业中它可用于零部件组装,加工工件的搬运、装卸等等。
1 3自由度气动机械手结构及其控制系统要求
3自由度气动机械手机构如图1 所示。3 自由度分别是指机械手的顺时针和逆时针旋转,机械手的水平伸缩,机械手的垂直运动,同时还能控制机械手手爪的张开和闭合。机械手旋转是靠控制步进电机来来带动,步进电机装在基座上,机械手水平、垂直以及手爪的打开和闭合,是靠电磁阀控制气缸来驱动。三个气缸分别装在机械手手臂水平位置、垂直位置以及手爪上。控制系统的基本要求为:能独立控制各个关节;具有示教功能,机械手能进行自动运行;步进电机速度可调;系统分别采用本地控制和上下位机结构形式的控制。
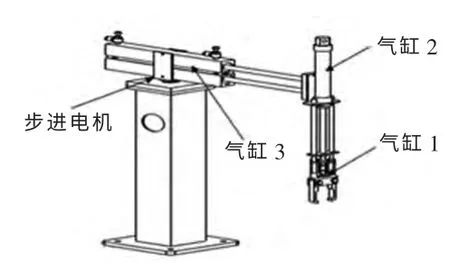
图1 3 自由度气动机械手结构Fig.1 Structure of 3 degree freedom pneumatic robotic arm
2 控制系统硬件设计
本文设计了以stc89c52rc 单片机核心控制系统硬件电路,系统的硬件框图和单片机IO 端口分配分别如图2和表1 所示。为减少编程工作,系统采用独立的按键。主要包括电机正反转控制按键、电机调速按键、三个电磁阀独立控制按键、数据存储按键、系统学习按键、演示按键等等。E2PROM 采用了ATMEL24C08,主要存储系统示教过程的相关数据,液晶屏采用1602,继电器主要是为驱动电磁阀。系统采用的电源主要包括5V 和24V 两种,其中24V 的电源主要用于驱动电磁阀和步进电机,其余均采用5V 电源。
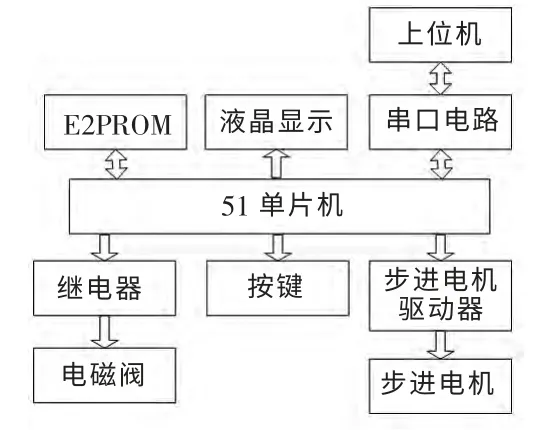
图2 控制系统结构框图Fig.2 Block diagram of control system
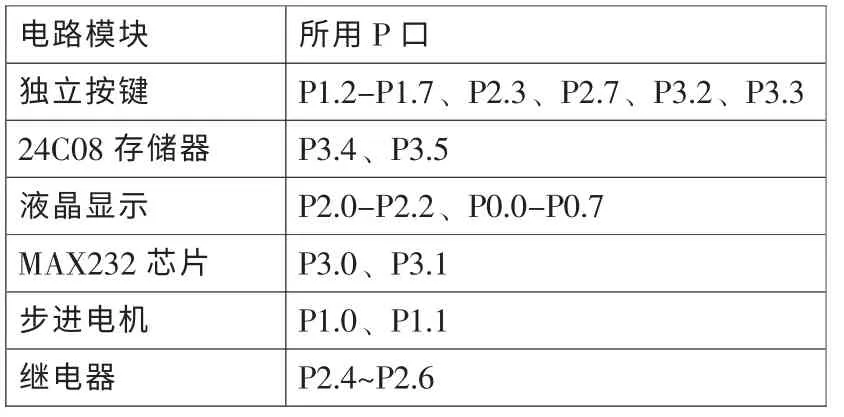
表1 单片机端口分配Tab.1Mcuportassignment
3 控制系统软件设计
根据所需要实现的功能,将整个系统划分为三种状态:点动状态、学习状态、示教状态。按下状态切换键,能实现各个状态的切换。在点动状态下,可实现机械手与步进电机的点动运行,即按下按键实现机械手顺时针和逆时针点动运行,如果长按键能实现机械手顺时针和逆时针连续旋转。还能实现机械手水平运动,垂直运动以及机械手手爪张开和闭合;在学习状态下可保存继电器的状态参数以及步进电机的位置参数,在液晶屏中能显示保存参数的个数;在示教状态可以实现继电器及步进电机依次回放学习状态所保存的一系列动作。程序编写采用模块化方式,即对各个模块单独调试,调试完成后,考虑如何用最小系统把各个部分有效串联起来,最终将各个模块串联起来,达到控制要求。
系统软件的主程序包括程序初始化和主循环。初始化主要针对定时器、AT24C08、继电器、液晶显示等硬件进行初始化。软件部分主程序主要包括系统初始化程序、步进电机控制程序、学习保存(外部中断)程序、按键处理程序、液晶显示程序、示教程序和上下位机串口中断程序等等。主程序流程如图3 所示。定时器T0 中断主要用于按键定时扫描、步进电机发脉冲等等。定时器T1则用于串口中断。在系统初始化的时候,将 TMOD =0x21,SCON=0X50,设置波特率9600,所以将TH1=TL1=0xFD,设定串行口工作方式1 允许接收。下位机采用串口中断实现,串行通信部分通信协议详见表2。上下位机通讯时,将上位机传送下来的数据用htd ()函数将十六进制转换为十进制,然后采用switch 语句,将不同的数对应不同的操作。系统的上位机采用VB 软件来实现,上位机的界面如图4 所示。

表2 系统上下位机通讯协议Tab.2System communication protocolofupper-lowercomputer
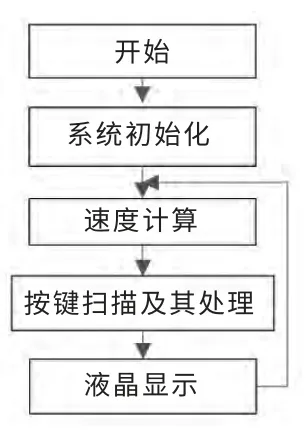
图3 主程序流程图Fig.3 Flow chart of main program

图4 上位机控制界面Fig.4 Control interface of upper computer
4 结束语
三自由度机械手采用单片机直接控制,可以在本地用按键操作和PC 机进行控制,提高了机械手操作的灵活性,提供了一种新的机械手的控制系统实现方法。
[1]蔡振江.单片机原理与应用[M].北京:电子工业出版社,2008.
[2]马忠梅.单片机的C 语言应用程序设计[M].北京:北京航空航天大学出版社,1998.
[3]周航慈.单片机应用程序设计技术[M].北京航空航天大学出版社,2002.
[4]索雪松.传感器与信号处理电路[M].北京:中国水利水电出版社,2008.
[5]李华.单片机实用接口技术[M].北京:北京航空航天大学出版社,2002.
猜你喜欢
电子制作(2021年3期)2021-06-16
电子制作(2018年24期)2019-01-03
制造技术与机床(2018年11期)2018-11-23
荣誉杂志(2017年7期)2017-08-23
制造技术与机床(2017年4期)2017-06-22
电子制作(2016年1期)2016-11-07
通信电源技术(2016年1期)2016-04-16
机械工程师(2014年12期)2014-12-23
河南科技(2014年11期)2014-02-27
长春工业大学学报(2013年2期)2013-08-16
