
基于模糊自适应PID算法的快速充电系统设计
2015-01-27 06:27孙莉莉李自成雷永锋
自动化与仪表 2015年4期
孙莉莉 ,李自成 ,雷永锋
(1.成都理工大学工程技术学院 自动化工程系,乐山 614000;2.核工业西南物理研究院,成都 610041)
农业机械化水平是一个国家农业现代化水平的重要标志,而农业机器人技术则更能反映一个国家的农业机械化科技创新水平。随着国家不断加大农业机械化发展扶持力度,采摘机器人、嫁接机器人等都得到了广泛应用。但由于国家大力提倡“绿色能源”,机器人所有的电池都面临一个共同问题:快速、高效、微损的充电技术。本文以机器人常用的VRAL铅酸蓄电池为例,针对充电过程中的非线性、时变性及不确定性等特点,采用模糊自适应PID控制实现PID参数的在线整定,达到良好的控制效果。
1 快速充电理论和模糊自适应PID控制
要加快蓄电池的充电速度,必须提高充电电流的数值,但蓄电池对充电电流的接受程度受一定条件的限制。20世纪60年代中期,美国科学家马斯提出了以最低出气率为前提的蓄电池可接受的充电电流曲线[1],如图1所示。从图中可看出,充电电流随时间按指数规律变化,超过这条自然接受曲线的任何电流,不仅不能提高充电速度,还会导致水解、析出气体、增大压力和温升。而小于这条特性曲线的充电电流均为蓄电池可接受的充电电流,但这又延长了充电时间。因此快速充电的理论为整个充电过程动态跟踪蓄电池可接受的充电电流,即充电电源根据蓄电池的状态自动确定充电参数,使充电电流自始至终保持在蓄电池可接受的充电电流曲线附近。当蓄电池有微量气体析出时,适当对电池进行大电流瞬时放电,可有效消除极化,增强电池的充电接受能力,使充电曲线不断右移,大幅度提高电池的充电速度和效率,缩短充电时间。
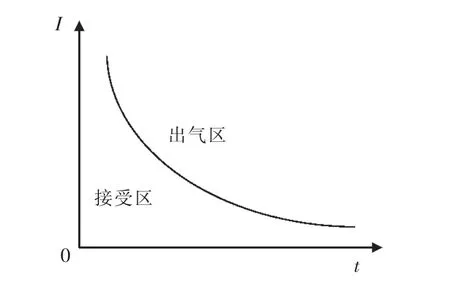
图1 铅酸蓄电池充电接受特性曲线Fig.1 Lead-acid battery charge acceptance curve
常规的PID控制器参数整定的方法复杂,需根据经验公式进行多次试验修正,不能自动适应实际情况的变化,实时性差。依据模糊自适应PID算法设计的模糊控制器,将人积累的经验作为控制规则,通过模糊推理对PID参数进行在线整定[2-3],解决了复杂非线性系统中评价指标不能定量表示的问题,得到了更理想的控制效果。
2 充电系统的控制方案
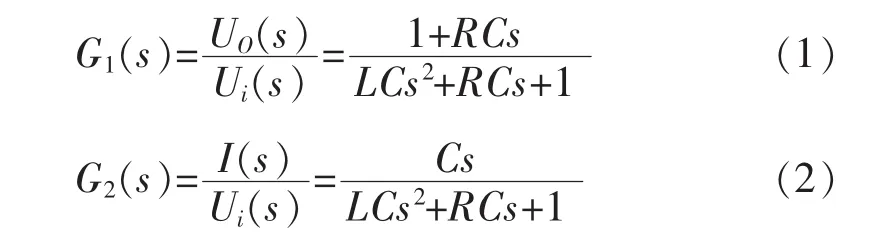
对充电系统进行PID控制,首先需建立系统模型。通过试验和计算,系统的动态模型采用电容和电阻的串联[4]。依据系统动态模型得到电压环和电流环的传递函数分别为
充电控制系统采用电流环和电压环2个闭环控制,并且都采用模糊自适应PID控制。电流环和电压环分别用于恒流充电控制和恒压充电控制。充电系统控制方案如图2所示。
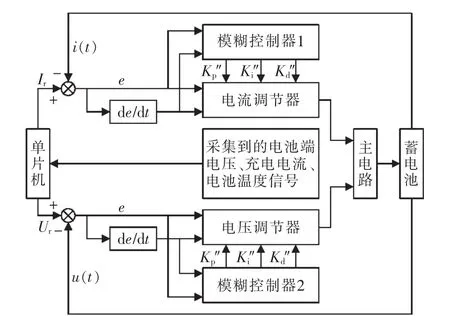
图2 充电系统控制方案Fig.2 Charging system control program
单片机依据采集系统得到的电池端电压、充电电流、电池温度等参数确定电池所处的充电阶段,从而确定启动电压调节器或电流调节器进行控制。并以电压或电流的误差e及误差的变化率ec作为模糊控制器的输入,采集系统不断检测e和ec,根据模糊推理对Kp,Ki,Kd3个参数进行在线整定,以满足不同工况下对参数的要求,从而保证系统具有稳定、快速的控制性能。
3 模糊自适应PID控制器的设计
基于上述分析,采用两输入、三输出结构的模糊控制器。
3.1 模糊化
在充电过程中,e和ec的值均为正[5],所以选ZE,PS,PM,PB,PL 作为 e和 ec的语言变量,量化论域为{0,6},隶属函数如图 3 所示。 输出量 Kp″,Ki″,Kd″均选 NB,NS,ZE,PS,PB 为语言变量, 量化论域为{-4,+4},隶属函数如图 4 所示。
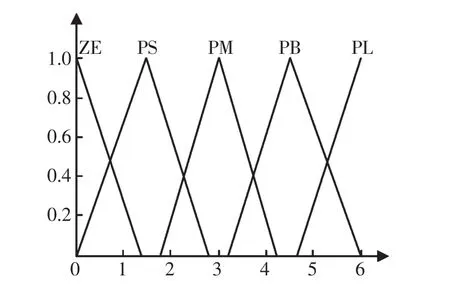
图3 e和ec的隶属函数Fig.3 Membership function of e and ec
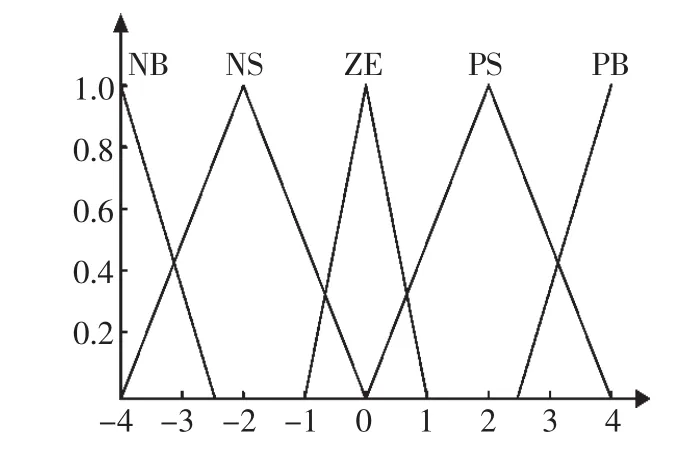
图 4 Kp″、Ki″、Kd″的隶属函数Fig.4 membership function of Kp″、Ki″、Kd″
3.2 建立模糊控制规则
模糊控制规则是将个人操作经验和积累的试验数据形成模糊条件语句集合。保证控制器输出能使系统输出响应的动静态特性达到最佳。本文模糊自适应PID控制器根据e和ec的不断变化,通过模糊推理对Kp,Ki,Kd进行在线调整。控制规则为
1)比例环节主要实现对偏差信号的控制。Kp值越大偏差信号减小越快,但系统的超调量也会相应增大。为了保证系统具有较好的稳定性,在控制后期,Kp值应取小些;
2)控制初期由于瞬间增大的偏差信号可能会使系统出现微分过饱和,所以Ki值应设置小些;控制后期,可适当增大Ki,系统能得到更好的稳定性;
3)由于滞后组件的存在,Kd值过大容易引起系统出现振荡。因此,Kd值应在控制后期逐渐减小,以保证系统具有良好的稳定性。
依据以上控制规则得到 Kp″,Ki″,Kd″3 个参数的模糊控制规则表,如表1~表3所示。
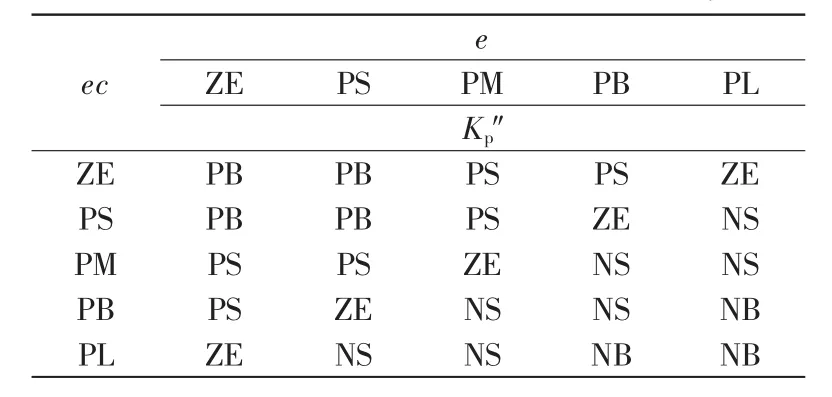
表1 Kp″的模糊控制规则表Tab.1 Fuzzy control rule table of Kp″
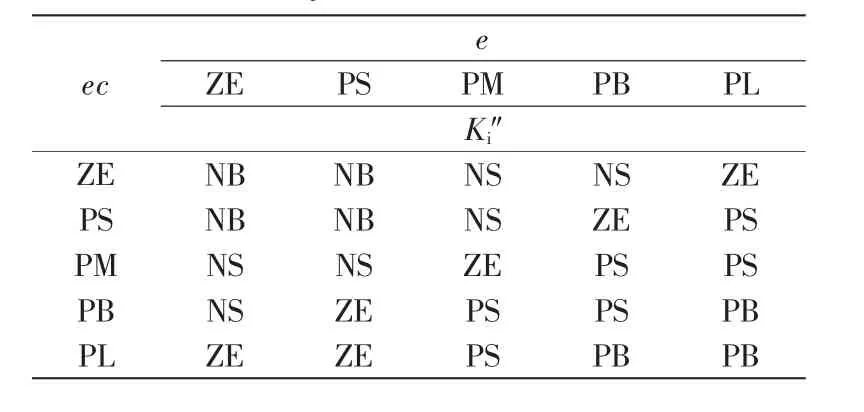
表2 Ki″的模糊控制规则表Tab.2 Fuzzy control rule table of Ki″
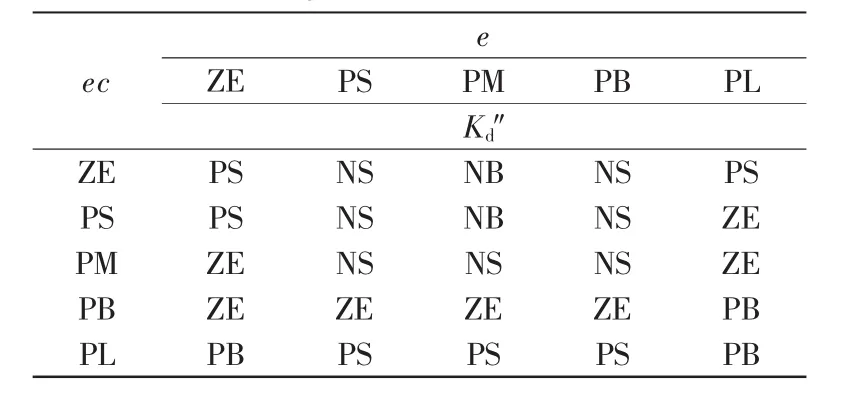
表3 Kd″的模糊控制规则表Tab.3 Fuzzy control rule table of Kd″
根据输入量的状态查模糊控制规则表,利用极大极小推理法计算即可得到模糊控制查询表,将查询表存储于单片机中,复杂的模糊逻辑推理就转换成简单的查表,满足了快速性的要求[6]。
3.3 反模糊化
在模糊控制器中,其输入量和输出量都是模糊量。而控制信号需要的是精确值,就需对模糊控制器的输出量进行反模糊化。本文采用重心法进行反模糊化,输出值即为 PID 参数的调整值 Kp″,Ki″,Kd″。式中 Kp′,Ki′,Kd′为常规 PID 的整定参数。
4 快速充电系统的硬件和软件实现
4.1 硬件实现
快速充电系统的硬件电路结构如图5所示。
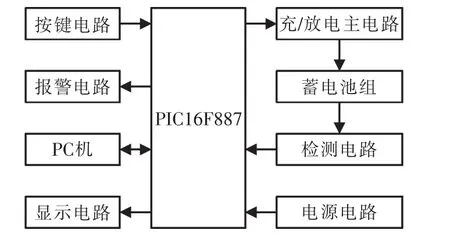
图5 充电系统的硬件电路结构框图Fig.5 Hardware circuit block diagram of charging system
系统主要由充放电主电路和控制电路组成。充电主电路由输入整流滤波、DC/DC变换器、输出整流滤波3部分组成,完成对蓄电池的恒流和恒压充电[7]。放电电路主要对蓄电池进行脉冲放电,消除极化增强蓄电池的充电接受能力。控制电路由单片机PIC16F887、检测电路和外围电路组成。通过对充电电压、电流的检测实现电压、电流闭环控制。通过对电池温度的检测实现充电终止条件的判断。
4.2 软件实现
以充、放电主电路为硬件基础,模糊自适应PID控制整个充电过程。蓄电池充电流程如图6所示。
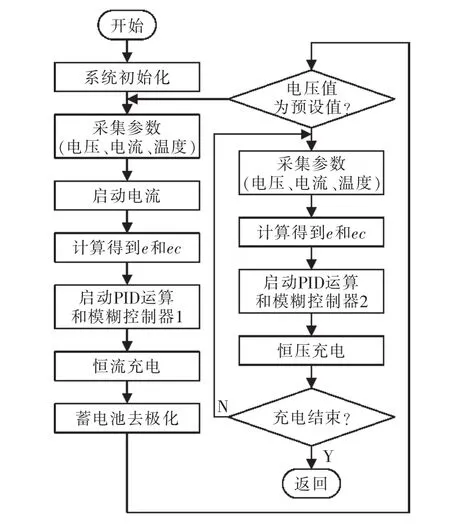
图6 充电控制流程图Fig.6 Charge control flow chart
5 实验结果分析
在Matlab/Simulink仿真环境下,对电流环控制系统进行模糊自适应PID控制和常规PID控制进行仿真对比[8-10],如图7所示。从图中可看出模糊自适应PID控制器的电流响应曲线响应速度快,调节时间短,无明显超调量,稳态误差小。模糊自适应PID控制的实时性更好。对电压环的仿真结果亦如此。
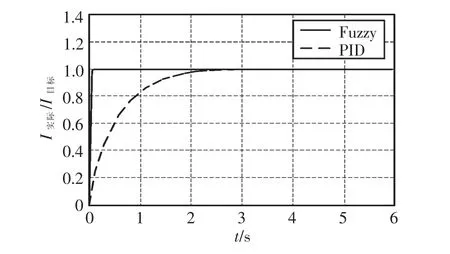
图7 模糊自适应PID和常规PID仿真对比图Fig.7 Fuzzy adaptive PID and conventional PID simulation comparison
本文还对模糊自适应PID控制的充电模式和传统的两阶段控制的充电模式进行了充电试验对比。对比结果如图8所示。图中可得到:模糊自适应PID控制的充电时间为5.3 h,两阶段控制模式的充电时间为6.4 h,可见模糊自适应PID控制的充电速度更快;12 V/9 Ah蓄电池最大充电电流为3 A,从图中可看到模糊自适应PID控制的最大充电电流可达到3 A,而两阶段控制模式一般设置为2.7 A,可见模糊自适应PID控制能捕捉到蓄电池可接受的最大充电电流,加快了充电速度。通过检测电路收集的温度数据显示,充电过程中模糊自适应PID控制模式的温升为17.8℃,两阶段控制模式的温升为20.1℃。从而证明模糊自适应PID控制的充电效率更高。
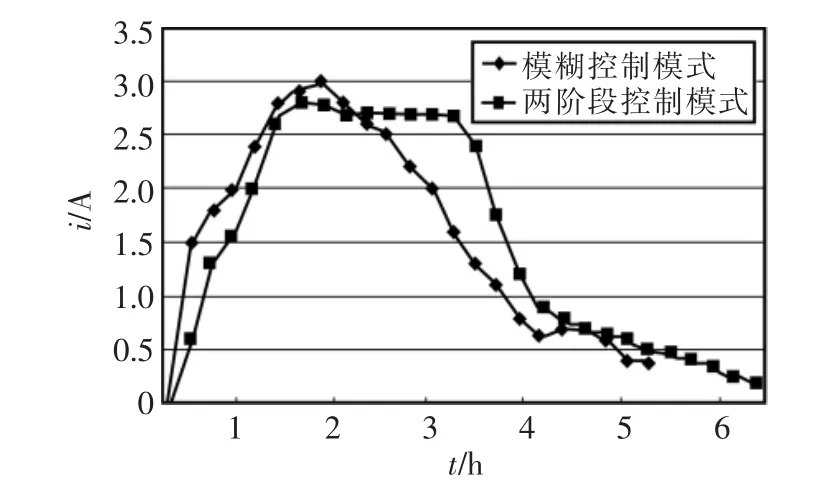
图8 两种充电模式的对比Fig.8 Comparison of the two charging modes
6 结语
本文设计了基于模糊自适应PID的快速充电系统。通过仿真,并与传统的两阶段充电模式进行比较,证明基于模糊自适应PID的快速充电系统具有稳定性能好、动态响应时间短、充电速度快、效率高等优点。实现了充电的智能化和快速化。
[1]李匡成,范艳成,胡旭杰,等.基于模糊控制的铅酸蓄电池智能充电系统设计[J].电力电子技术,2010,44(11):119-121.
[2]张化光,何希勤.模糊自适应控制理论及其应用[M].北京:北京航空航天大学出版社,2002.
[3]刘明俊,于明祁,杨泉林.自动控制原理[M].长沙:国防科技大学出版社,2006.
[4]王静,康龙云,李鹰.基于模糊自适应PID控制的铅酸蓄电池充电系统仿真[J].低压电器,2012(2):31-34.
[5]孙莉莉.基于模糊控制的智能充电系统研究[D].陕西:西北农林科技大学,2006.
[6]吴瑶.基于模糊控制的阀控式铅蓄电池充电机的研究[D].湖南:南华大学,2011.
[7]王兆安.电力电子技术[M].5版.北京:机械工业出版社,2010.
[8]温银堂,贺晙华,王洪斌,等.基于模糊自适应PID算法的改进三段式蓄电池快速充电系统[J].清华大学学报:自然科学版,2014,54(7):952-958.
[9]杨益兴,崔大连,周爱军.模糊自适应PID控制器及Simulink仿真实现[J].舰船电子工程,2010,30(4):127-130.
[10]石辛民,郝整清.模糊控制及其MATLAB仿真[M].北京:清华大学出版社,2008.
猜你喜欢
电力勘测设计(2022年3期)2022-04-07
成都信息工程大学学报(2021年6期)2021-02-12
中国新通信(2020年1期)2020-05-25
电子制作(2019年16期)2019-09-27
汽车维修与保养(2017年1期)2017-05-15
电脑知识与技术(2016年24期)2016-11-14
汽车维修与保养(2016年1期)2016-09-07
电子制作(2016年21期)2016-05-17
汽车维修与保养(2016年12期)2016-03-14
汽车维修与保养(2016年11期)2016-02-21
