
一种小型数字电动舵机系统设计与实现
2015-01-27 06:29赵怀林朱纪洪
自动化与仪表 2015年10期
伍 城,赵怀林,朱纪洪
(1.上海应用技术学院 电气与电子工程学院,上海 201418;2.清华大学 计算机系,北京 100084)
舵机系统作为一种高精度高响应速度的位置伺服系统,通过接受飞控系统给定的舵面偏转信号,输出控制指令来操纵导弹舵面的偏转,从而改变导弹的飞行姿态或飞行轨迹[1-3]。根据动力源的不同,常用舵机系统可分为气动舵机、液压舵机和电动舵机。与气动和液压舵机相比,电动舵机具有优化机载能源管理、重量轻、体积小、可靠性高、传动效率高、使用维护方便、工艺性好、战场生存率强等突出优点,因而在无人机等飞控系统中得到越来越广泛的应用[4-6]。电动舵机按照控制方式的不同又可分为模拟舵机和数字舵机,与传统的模拟舵机相比,以高速微控制器为核心的数字控制系统硬件电路的标准化程度高,制作成本低,且不受温度漂移的影响,而且实现了舵机控制的小型化和模块化,大大提高和改善了舵机控制器的性能和可靠性[7]。本文详细设计和实现了一种用于某气体调节控制器的数字电动舵机驱动控制系统,达到对位置给定指令的快速、高精度响应,结构简单,控制效果优良。
1 系统总体结构设计
本舵机系统主要由三相直流无刷电机、驱动控制器、机械结构以及传感器4部分组成,其中驱动控制器是舵机系统设计最关键的环节,系统总体框图如图1所示。
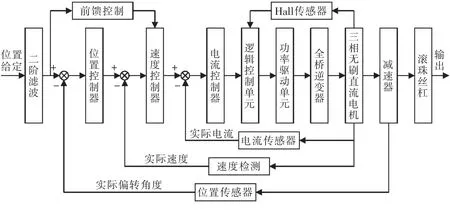
图1 系统总体框图Fig.1 Overall system block diagram
系统位置传感器测得摇臂实际位置后,经过一阶惯性滤波器滤除高频噪声抖动,与滤波后的位置给定指令一起作为位置闭环输入。位置闭环输出作为转速给定值,与实际转速和前馈控制器的输出一起输入给转速闭环控制器。转速闭环输出电机电流给定值,与电流传感器测得的实际电流构成电流闭环控制。电流环输出PWM波,结合Hall信号经过逻辑运算后得到功率驱动管的导通状态,由功率放大单元变换后驱动全桥功率管通断,从而控制三相直流无刷电机转动,电机输出轴连接精密的减速器以及机械变换后驱动舵机摇臂摆动。
2 系统硬件设计
舵机系统硬件设计主要有DSP+CPLD控制单元、三相全桥及其驱动单元、系统信号采集及调理模块及保护电路等。采取模块化设计,数字信号与模拟信号分开布局,使其抗干扰能力强,系统功能更稳定,整体硬件结构轻小,安装方便。
2.1 DSP+CPLD数字控制单元设计
本系统数字控制单元主要由DSP结合CPLD组成。DSP主要负责实现系统闭环控制和数据运算处理,其丰富的外设资源包括A/D模块用于模拟量采集,SCI模块通过串口422与主控设备数据通信,eCAP模块用于捕获处理后的Hall脉冲序列以及由PWM模块输出控制律执行结果。CPLD将输入的三路Hall脉冲经过三倍频后发送给DSP的捕获(CAP)端口,同时解算得到电机实际转动方向,此外设计电机电流保护和位置保护逻辑。控制器原理框图如图2所示。
2.2 三相全桥及其驱动单元
本系统选用高度集成三相无刷直流电机驱动芯片L6235作为驱动单元的核心,主要由120°相位差的霍尔信号解码逻辑、高速逻辑阵列、三相全桥驱动单元以及由内置快速续流二极管的增强型MOS管组成的全桥逆变器构成。其内部自带PWM电流控制器实现电机电流闭环控制。此外,芯片拥有无功耗过流检测和保护、停车及过热关断功能。

图2 系统主控单元Fig.2 System control unit
本系统电流闭环由硬件实现,通过集成驱动芯片结合外围器件完成。芯片提供恒定时间为Toff电流控制电路,它有一个低偏置的快速比较器,其输入端分别连接VREF和SENSE引脚。通过检测连接在低侧MOS管源级与信号地之间的电流传感电阻器RSENSE上的压降测量桥臂上的电流,当电机中的电流增加时,电流传感电阻器上的压降也会成比例增加。VREF引脚由外部给定电压值作为电流控制量,当RSENSE上的压降高于VREF引脚上的参考输入电压时,比较器输出将会触发单稳态电路,所有功率MOSFET会被关断,单稳态时间结束后,桥路又将会打开,适当选择RCOFF引脚上的外部RC网络参数可决定关断时间,从而决定电流环增益。其硬件电路图如图3所示。

图3 PWM电流闭环单元Fig.3 PWM current loop unit
L6235提供了1 μs消隐时间TBLANK,避免比较器在MOSFET开始打开的瞬间由于续流二极管反向恢复电流引起的错误触发。电机电流IOUT波形和电流传感电阻器上的压降VSENSE波形如图4所示。
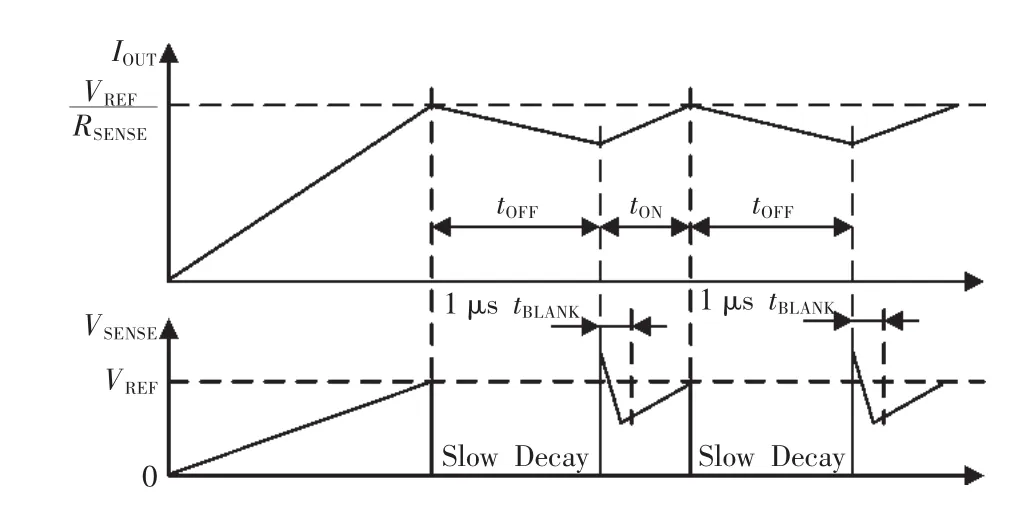
图4 电机电流和电流传感电阻器压降波形Fig.4 Motor current and current sensing resistor voltage drop waveform
2.3 信号采集及调理模块
电机输出轴经过减速后与滚珠丝杠相连,将电机高速旋转输出转换为大推力直线输出,通过推动舵机摇臂摆动使舵机最终输出较大的转矩。采用线性位移传感器LVDT与滚珠丝杠相连而精确测量出丝杠位移,通过定量关系转换为摇臂输出角度。位移传感器外接12 V的供电电源,输出端即可获得0.5 V~4.5 V的稳定输出电压。通过信号调理电路将其转换为0~3 V的范围送给DSP进行A/D转换。
实际调试过程中,舵机摇臂行程要求-9°~9°,对应丝杆位移为6 mm,选择LVDT线性范围内的输出电压为1 V~4 V的输出。为保证系统安全稳定运行,需设计位置保护功能模块,位置输出调理电路如图5所示。
上述调理后的信号送给CPLD进行逻辑运算,通过逻辑运算控制驱动单元的停车等功能模块,达到位置保护的功能。位置保护逻辑真值表如表1所示。

图5 信号调理电路Fig.5 Signal conditioning circuit

表1 位置保护逻辑真值表Tab.1 Position protection logic truth table
位置保护模块使舵机摇臂在保护区内正常转动,其中DIR为电机转向给定信号,设定摇臂在保护区之外时,当接受向保护区内转动的方向指令时,驱动模块正常工作,电机按指定方向转动,否则驱动芯片关闭全桥功率管,使电机停车。
3 系统控制策略及软件实现
3.1 系统控制策略
本系统采用电流闭环、转速闭环和位置闭环三闭环的控制策略,其中电流闭环通过硬件实现。速度闭环主要用于增强系统抗负载能力,抑制速度扰动,采用P控制即可满足需求。由于系统是一个位置伺服系统,对位置指标要求较高,系统位置环的本征模型较为明确,因此可采用基于传递函数模型的极点配置设计方法。
首先对系统进行动力学建模,其动力学模型主要包括电机模型和传动机构模型。其动力学模型框图如图6所示。

图6 舵机本体模型Fig.6 Actuator ontology model
图中,模型输入为电机电枢电压,输出为舵机摇臂角速度,则模型为二阶系统。由图6可得系统传递函数为
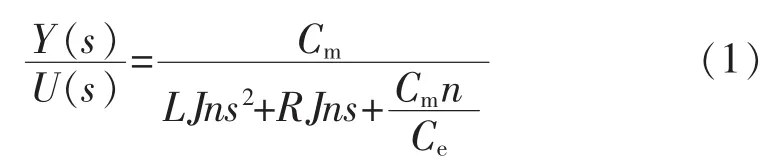
式中:Cm为电机转矩常数;Ce为电机电动势常数;L为绕组电感;R为电机绕组电阻;J为转动惯量;n为舵机减速比。带入参数可得:

系统速度闭环采用反馈控制,由简单的P控制即可满足速度闭环需求指标,通过临界振荡法整定控制器参数,由于速度闭环特征方程两根相差较大,通过测试可将速度闭环模型等效为一阶系统,其闭环传递函数为

系统进行位置闭环控制器设计时,输出为舵机摇臂位置,由上可知位置环被控对象为二阶系统,其传递函数为

由于系统位置环模型已知,故可采用基于传递函数模型的极点配置设计法,该控制器实际是由前馈控制与反馈控制结合完成。前馈控制主要使得输出量有满意的跟踪性能,满足系统动态响应指标。反馈控制使得系统具有抑制干扰和减小模型误差影响的性能。其控制框图如图7所示。
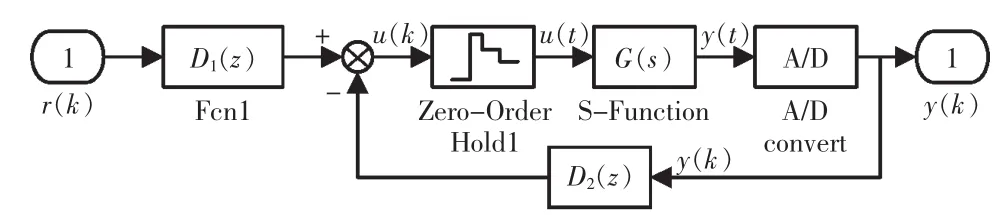
图7 位置闭环控制框图Fig.7 Position closed-loop control block diagram
由图7可得,系统位置闭环控制器输出为

只需设计出 D1(z)和 D2(z),即可得到控制律u(k),将其转换成差分方程便可在软件中进行数字化实现。首先需利用零阶保持器法将G(s)转化为等效的离散传递函数为

根据位置闭环系统指标要求,可确定系统闭环传递函数为

根据上述系统闭环传递函数和位置环本征模型,通过待定系数法求得前馈函数D1(z)和反馈函数D2(z),将其转换为差分方程即可在软件中数字化实现。实际测试过程中需对其控制参数进行细微整定,直至达到系统设计指标。
3.2 系统软件设计与实现
系统软件设计主要由DSP控制器完成,包括定时器设计、霍尔脉冲捕获、PWM模块设计、A/D采样设计、串口通信设计、位置闭环控制律设计及其他数据解算设计。
定时模块的作用是产生各种时基,总控模块按照不同的时基调用相应的模块,保证系统的稳定可靠运行。系统设置定时模块产生周期为0.05 ms的中断,作为系统循环的基准时钟,同时,各种外设根据需要各自独立配置时钟。PWM模块设置产生幅值为3.3 V,周期为20 μs且占空比可调的PWM波,通过执行闭环控制律改变PWM的占空比。捕获模块通过捕获Hall脉冲解算得到舵机摇臂实际转速。系统定时采样,获得A/D转换结果用于系统控制。串口通信采用串口中断完成,实时接收主控设备发送的帧数据,并解算得到控制指令,同时将舵机实测数据封装成帧数据发送给主控设备。软件流程图如图8所示。

图8 系统软件流程图Fig.8 Flow chart of system software
4 实验数据分析
电动舵机驱动控制器测试平台以电动舵机作为被控对象,PC作为上位机,通过LabVIEW设计上位机通讯软件,发送位置给定指令,舵机系统快速响应指令并向上位机发送当前位置反馈信息,上位机实时显示位置给定和位置反馈波形。
系统空载条件下,系统量程为0°~18°,满量程范围内进行阶跃响应实验,上位机测试波形如图9所示。
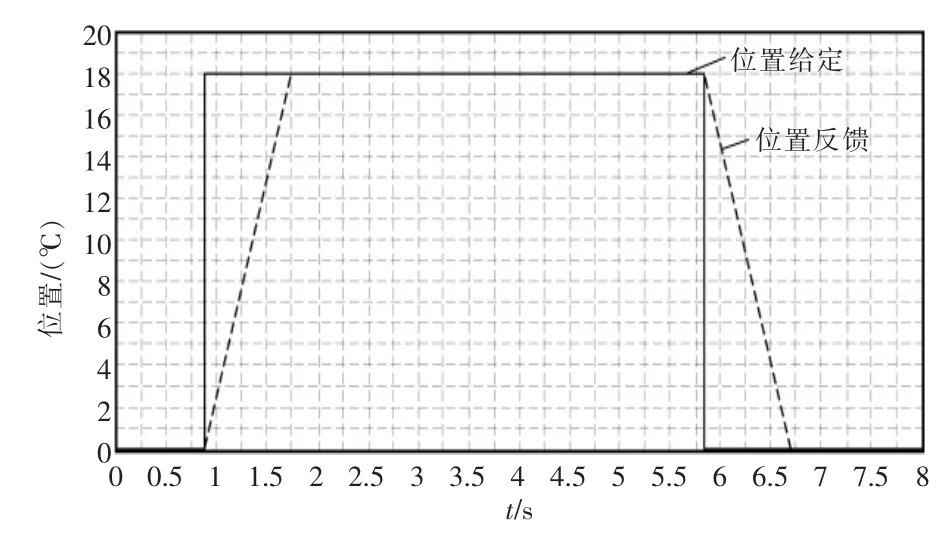
图9 方波阶跃响应波形Fig.9 Square wave step response waveform
由图可知,系统位置定位精度远小于+0.1°,满足静态精度要求。阶跃响应过程中,舵机速度达到饱和,延迟时间可忽略不计,小于0.01 s;上升时间为0.8 s,调节时间为1 s,超调量极小,阶跃响应指标满足设计需求。
为测试舵机系统带宽,需给定系统正弦波扫频信号,观察系统动态响应情况。设计系统带宽为6 Hz,给定测试信号频率为6 Hz,幅值取系统量程10%为0.9°,测试波形如图10所示。

图10 正弦波响应波形Fig.10 Sine wave response waveform
由图10测试波形可知,系统位置给定幅值为0.9°,闭环响应波形幅值0.8°,输出幅值衰减小于3dB,相位滞后近似为70°,小于90°,满足带宽设计要求。
5 结语
本文设计了基于DSP+CPLD控制结构的数字舵机系统,采用集成驱动芯片,使系统实现更加简便、可靠。采用电流环、转速环和位置环三环控制策略使系统控制更加精细,达到对舵机摇臂位置指令快速、高精度响应。实验表明,系统具有极小稳态误差和较高动态响应速度。系统输出额定负载力矩为100 Nm,因此适用于高精度、大负载、高速的飞控系统舵面伺服控制,具有较高的实用价值。
[1]Boglietti A,Cavagnino A,Tenconi A,et al.The safety critical electric machines and drives in the more electric aircraft[C]//35th Annual Conference of IEEE Industrial Electronics(IECON 2009),Porto,Portugal,2009(11):2587-2594.
[2]崇阳,李言俊,张科,等.基于DSP的模糊PID舵机控制算法设计与实现[J].飞行力学,2011,29(2):86-88.
[3]刘涛,吕迅,黄一敏.基于DSP的数字舵机控制器设计[J].沈阳航空工业学院学报,2006,23(1):8-11.
[4]Rosero J A,Ortega J A,Aldabas E,et al.Moving towards a more electric aircraft[J].Aerospace and Electronic Systems Magazine,IEEE,2007,33(3):3-9.
[5]Atkinson G J,Mecrow B C,Jack A G,et al.The design of fault tolerant machines for aerospace application[C]//IEEE International Conference on Electric Machines and Drives,2005(5):1863-1869.
[6]Garcia A,Cusido J,Rosero J A,et al.Reliable electro-mechanical actuators in aircraft[J].IEEE Aerospace Electronic Systems Magazine,2008,23(8):19-25.
[7]Pivonka P.Comparative analysis of fuzzy PI/PD/PID controller based on classical PID controller approach[J].Proceeding of the IEEE,2002(1):482-497.
[8]Wu Hong xing,Cheng Shu kang,Cui Shu mei.Controller of brushless DC motor for electric vehicle[J].IEEE Transactions on Magnetics,2005,41(1):509-513.
猜你喜欢
新疆钢铁(2021年1期)2021-10-14
中国交通信息化(2020年4期)2021-01-14
水泥工程(2020年4期)2020-12-18
中国特种设备安全(2019年9期)2019-12-03
中国惯性技术学报(2019年3期)2019-10-15
自动化学报(2019年6期)2019-07-23
电子制作(2018年1期)2018-04-04
制造业自动化(2017年2期)2017-03-20
汽车实用技术(2016年1期)2016-12-24
科学中国人(2015年26期)2015-12-28
