新直流电动机的换向策略研究
2015-01-22 05:27陈敏祥汪全虎王宗培
机电工程 2015年5期
陈敏祥,汪全虎,王宗培
(1.浙江大学电气工程学院,浙江杭州310027;2.珠海运控电机有限公司,广东珠海519000)
0 引言
电枢反应是直流电机的核心问题,它对电机性能及换向有重要影响。有刷直流电机的机械换向与新直流电机(本研究称New DCM)的电子换向有根本的区别,因此电枢反应对二者的影响也是不同的。有刷电机有独立的换向回路,主电路始终连接在正、负电源上,在延时或超前换向时会产生换向火花,交轴电枢反应使气隙磁场发生严重畸变,使物理中心线产生偏移。New DCM 的换向会改变绕组电路的拓扑结构,电枢反应改变气隙磁场的分布,进而对换向和绕组电流(本研究称换向单元电流)产生很大影响。
文献[1-3]提出了New DCM 的设想,New DCM 具有传统有刷直流电机的电枢绕组结构,采用电子换向器换向。文献[4-5]详细介绍了9 换向单元New DCM 原理结构,以及其样机实测机械特性曲线。文献[6-8]建立了New DCM 仿真模型,并对New DCM 仿真特性进行了深入介绍。但是以前对New DCM 的研究集中在电机结构和原理性的分析,对于其换向问题还没有深入研究。文献[9-10]分析了New DCM 的电枢反应时电枢电路情况。本研究在已有研究基础上对New DCM 的换向问题进行分析,提出提前导通换向方法来改善换向状况。
本研究以9 换向单元New DCM 和特定的电子换向器为例,在介绍其电枢绕组结构和工作原理的基础上,研究电机负载气隙磁场的分布,分析电枢反应对换向和绕组电流的影响。
1 New DCM 工作原理
笔者研究的New DCM,永磁转子磁极对数p=2,定子槽数Z=18,每对极下对应9 个槽,槽距角为40°电角度,线圈节距y1=4。在一对磁极范围内有9 个绕组元件,将二对极下处于相同磁场位置的9 个绕组元件采取并联的接法,合成总共只有9 个换向单元,它相当于传统直流电动机电枢的迭绕组。整个电枢绕组的9 个换向单元首尾相连成环形结构,相邻换向单元在空间上相差40°电角度。电子换向器为9 相桥式电路,9 个换向单元的引出端依次连接到桥式电路的中点,电子换向器示意图如图1所示。电枢绕组内电流分布的要求决定了功率开关管的通断状态,对于直流电枢绕组来说应使电枢表面一个极距范围内的电流为同一方向,相邻极距范围内为反方向。

图1 电子换向器示意图
New DCM 的转子位置检测由9 个Hall 元件来实现,根据检测到转子位置信号,产生18 个功率管导通信号,每个时刻只有一个上桥功率管和一个下桥功率管导通。9 换向单元New DCM 一个电周期内有18 个通电状态,其顺序依次是或者相反(取决于电机的旋转方向),使得反电势瞬时值为正的换向单元内电流为正,反电势瞬时值为负的换向单元内电流为负,任何一个换向单元的反电势瞬时值过零时,都应改变该换向单元内电流的方向,相当于有刷电机的碳刷放在几何中心线上。更详细的九换向单元New DCM 的工作原理见文献[11-12]。
2 New DCM 的电枢反应
与直流电机类似,New DCM 空载运行时,气隙磁场由永磁体建立,此时气隙中主磁场磁通密度的分布如图2 中Bf所示,其中一个换向单元的轴线与d 轴重合时,与其对应的Hall 正好在q 轴上,此时换向单元的反电势为零,Hall 信号翻转,该换向单元进行换向。
电机Hall 状态的改变只与转子位置有关,但是换向单元的反电势与气隙磁通密度的分布有关,与有刷直流电机一样,电机负载运行时,电机的磁场由励磁磁动势和电枢磁动势共同产生,所以负载时气隙磁场的分布与空载时会有比较大的区别。电枢电流产生的电枢磁场对主极励磁磁动势建立的气隙磁场产生影响,使气隙磁场发生畸变。New DCM 在带负载运行时,气隙磁通密度波形也会因为电枢反应变得畸形,因此需要对带负载运行时的电枢反应对电机性能的改变进行分析。
假设:①磁路不饱和;②气隙均匀,不考虑铁芯开槽的影响;③支路电流是直流。则可以画出负载时磁通密度波形如图2所示。由Bδ曲线可得到:由于电枢反应的影响,负载时的电势过零点由如图所示a 点移到了b 点,这个角度为α,随着负载加大,电枢电流相应地会增加,使得这个角度也会相应增加。Hall 信号翻转时刻只与转子位置有关,即Hall 信号翻转时刻应该在a 点处因此当Hall 状态翻转时,其对应换向单元的反电势已经提前换向。这与有刷电机碳刷沿转子旋转方向移动一个角度类似,负载时的换向是滞后换向,换向时间滞后反电势过零点α 度。

图2 负载时气隙磁通密度波形
3 考虑电枢反应的电枢电路分析
电枢反应不会改变有刷电机的主电路,因此在进行有刷电机的稳定分析时,一般不去考虑电枢反应对电机电路的影响。New DCM 采用本研究如图1所示的电子换向器,电枢反应将会对电枢电路结构和电机性能产生比较大的影响,因此需要分析电枢反应时的电枢电路。
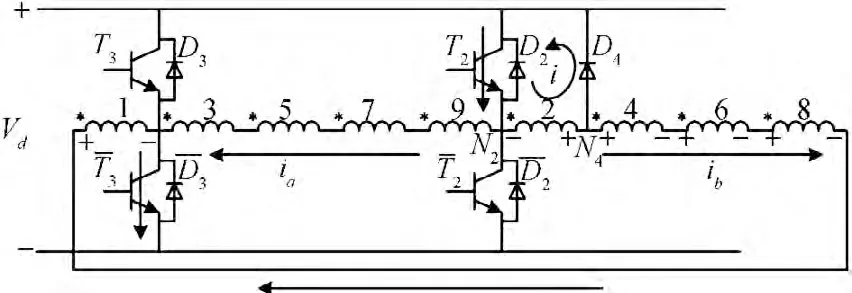
图3 考虑电枢反应时的电枢电路
与有刷电机类似,New DCM 换向单元中反电势瞬时值为正的换向单元在一条支路,反电势为负的换向单元在另一条支路,这样恰好和有刷直流电机电枢情况类似,因此,类比于有刷直流电机,可以得到New DCM电枢反电势和电磁转矩表达式。反电势表达式为:

式中:ei—换向单元反电势;Ce—电动势常数;φ—磁通,Wb。
电磁转矩可表示为:

式中:Ia—电枢总电流;CT—转矩常数。
不考虑电枢反应时,样机有9 个换向单元,工作时分成二条支路,每条支路串联换向单元数总是在4—5—4…的变化,由于绕组电阻的影响,使支路电流有波动,如果有足够多的换向单元,则支路电流将是理想的直流,两条支路的支路电流分别为:
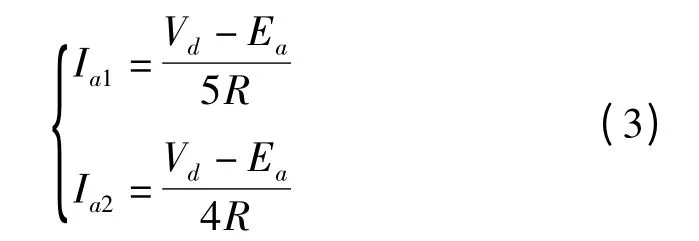
式中:Vd—母线电压;Ea—总电枢反电势;R—换向单元电阻;Ia1,Ia2—两条支路的支路电流。
电枢总电流:

由电势平衡方程得到机械特性表达式:
式中:Ra—电枢回路总电阻。
考虑电枢反应时,2 号换向单元换向前,其反电势极性已经变为负极性,此时2 号换向单元电流为两种电流的叠加,其中环流大小可有下面公式计算得到,有:

式中:e2—2 号换向单元反电势,R—换向单元电阻。此时,环流也会产生电磁转矩,有:

环流产生的电磁转矩为制动转矩,这样,会使得总的电磁转矩减小,进而使电机转速也会相应的减小,使电机机械特性变软,降低了电机运行性能。
当电枢电流较小时,换向单元的电流基本恒定,当电枢电流增大时,换向前的延时角度α 内电流增大,意味着该单元此刻有环流。随着电枢电流的增加,环流会更大,对电机性能影响也更大,对功率管的容量也要求更大。考虑到电机电枢反应对电机性能的影响,自然地,本研究应当对电机的控制策略进行改进,消除因电枢反应产生的环流对New DCM 系统的影响。通过分析,笔者认为采用提前导通换向策略,可以减小系统环流的影响,同时也使得电机机械特性变硬,带负载能力加强。
4 提前换向方案的实现
有刷电机可以采用移动电刷的方法可以削弱电枢反应的影响,对于本研究New DCM 电机,采用的是电子换向器,可以通过对换向导通的角度的控制来达到移动电刷的效果。移动电刷的本质在于超前换相,对于New DCM 电机,也就是要让绕组换相时刻超前,达到削弱电枢反应的目的。对无刷电机而言,逆着旋转方向移动“电刷”,即提前换相可以削弱电枢反应不良影响。
根据New DCM 工作原理,当采用标准角度换向模式时,DSP 读取9 个Hall 的状态值,根据各相Hall 变化情况,可得到New DCM 的运行状态,依据环形分配表,给出对应的通断信号。各个通电状态顺序如图9所示。一个电周期有18 个通电状态,一旦有Hall 状态发生变化,电机进行换向。图中深灰色方块分别对应1~18 号通电状态所对应的开关管导通,每个通电状态导通时间为20°电角度。
提前角度换向导通,即将同样的一个通电状态比正常导通时向前提前一个角度β。对于New DCM 而言,Hall 信号状态发生变化时,原本需要导通的两个功率管在Hall 状态改变前β 电角度就已经导通。
电机负载时,因为电枢反应的影响,会使电机气隙磁通密度畸形,导致Hall 状态改变时,相应相换向单元反电势已经提前α 角度由正变负或是由负变正,因此会在即将换向的换向单元上产生环流,而这个环流对电机的正常运行产生比较大的影响,而本研究提出的提前导通角换向模式是通过将相应的导通状态提前β 角度,如果能够对这个角度进行控制,将α 与β 大小进行匹配,可以对因为电枢反应产生的换向单元反电势极性提前变化产生的环流现象进行改善,从而提高电机的运行性能。
通过检测9 个Hall 信号的上升沿与下降沿,每一个边沿信号控制这个边沿信号20°电角度之后的那个导通状态。以1 号Hall 信号上升沿为例,若要提前β角度换向,只需在上升沿来到后延时20°-β 电角度所代表时间,再将通电状态2 的开关管导通即可。如果要提前β 角度换向,当检测到1 号Hall 信号上升沿后,根据Hall 周期计算20°-β 电角度所代表时间,有

式中:THall—Hall 周期时间。
通过DSP 定时器进行计数,当20°-β 电角度时间计算结束,再给通电状态2 的开关管导通,其他状态可以以此类推。提前角β 需要与反电势提前转换极性α 进行匹配。而β 的获得可以通过对电机换向单元电流的分析来得到,理想情况下根据式(3)计算所得的换向单元正半周期电流如图4所示。换向单元在图中所示区域9 结束后换向,根据电枢反应分析,换向单元电流在换向状态时电流因为环流会增大,而区域3~7不牵涉到相关桥壁开关管通断,因此,这段区域内换向单元电流变化平稳,与理想状况电流变化类似。如果要通过提前换向导通控制,使电机运行性能与不考虑电枢反应时相同,只需将区域9 的电流与区域3、5、7进行比较,在一定容许范围内,如果区域9 的电流比区域3、5、7 电流平均值大,则将提前角β 增加;如果区域9 电流与区域3、5、7 电流平均值大小在容许范围内,则不改变提前角度β 的值。

图4 理想状况换向单元正半周期电流
换向单元相电流是通过霍尔电流传感器测量得到,从传感器得到电流信号经调理电路至DSP 的ADC口,因为硬件资源的限制,对于采样时刻的选取非常关键,本研究采样时间在延时结束时刻读取ADC 采样值,再给通电状态,然后对采样电流值进行处理,从而得到提前角度β 的值。
5 实验结果及分析
本研究样机为9 换向单元New DCM,电机相关参数为:转子磁极对数p=2,换向单元电阻R=1.55 Ω,自感L=1.415 mH,互感M1=0.430 0 mH、M2=0.181 0 mH、M3=-0.057 2 mH、M4=-0.437 5 mH。根据前述分析,笔者在实验样机控制系统进行了基于提前换向的控制实验。
负载接近0 时单元电流波形如图5所示。负载较小或较大时换向单元电流波形分别如图6、图7所示。根据换向单元电流波形,可以发现电枢电流也较小,换向单元电流基本恒定;当负载加大的时候,根据图6(a)和图7(a)换向单元正常换向时换向单元电流波形,可以看到换向单元电流在换向前一个通电状态电流有一个明显的增加,这说明电枢反应在换向单元上产生了环流的结论的正确性,这个环流在换向单元上叠加,使处于将要换向的换向单元电流增大,这也同时证明了关于电枢反应对电机影响的分析是正确的。

图5 负载接近0 时换向单元电流波形
图6(b)和图7(b)分别为负载加大且提前换向时的换向单元电流波形及对应的Hall 信号,对比换向单元电流与Hall 相位关系,可以得到:随着负载的加大,电枢电流也相应的增加,换向单元电流相对于正常换向情况下有一个非常明显的改善,此时换向单元电流表现出平稳的直流电流,表明环流分量减小了,使电机换向器开关管流过电流减小,系统的运行性能更好,功耗更低。
同时,还可以通过实验结果分析得到,采用提前换向也会对电机转速有一个很好的提升效果,如图7所示,在相同负载转矩下,转速从正常换向时的8 571 r/min 提升到9 736 r/min,这与直流电机移刷控制效果正好相符。
电机机械特性曲线对比图如图8所示。实测与仿真结果表明,调节提前换向角,在减小电机换向环流的同时,也可以达到类似有刷电机移动电刷控制的效果,提高电机的调速范围,提高电机性能。
6 结束语
本研究在简要介绍了9 换向单元New DCM 工作原理的基础上,分析了负载时的气隙磁密,以及电枢反应对换向的影响。本研究讨论的电子换向器是成本最低、结构最简单的电子换向器,但它难以达到机械换向的效果,电枢反应引起的延时换向将在换向单元内产生环流,从而降低了电机的性能,增加了功率器件的成本。本研究在分析中通过采用提前换向策略来进行改善,实验结果验证了本研究分析的正确性,分析结果对New DCM 及电子换向器的设计具有指导意义。

图7 负载较大时换向单元电流波形
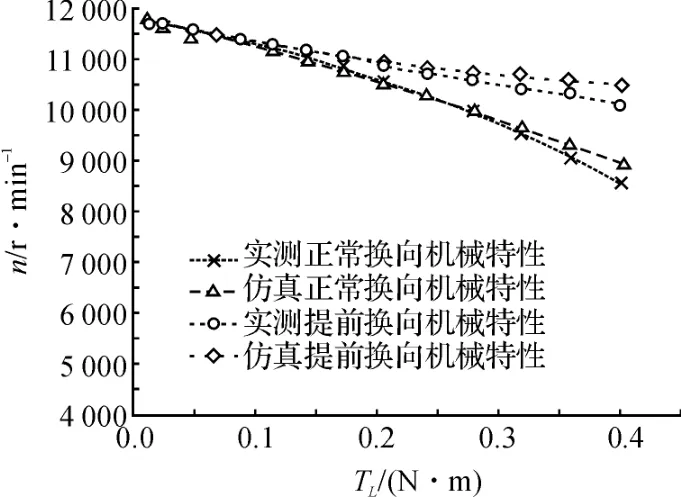
图8 机械特性曲线对比
[1]王宗培,陈敏祥,运控电机之无刷直流电动机[J].微电机,2009,42(12):58-62.
[2]王宗培,段卫国,运动控制电机之步进电动机[J].微电机,2008(9):61-68.
[3]王宗培,陈敏祥.九换向单元电子换向直流电动机,实用新型专利[P].中国:ZL.200820205978.1,2008-12-24.
[4]王宗培,陈敏祥,许明有,等.新一代直流电动机(NewDCM)的实践[J].微电机,2010,43(11):1-6.
[5]许明有,基于新型BLDCM 的倍捻机电锭驱动系统[D].杭州:浙江大学电气工程学院,2010.
[6]陈敏祥,李凤才,王宗培.新型直流电动机特性仿真研究[J].机电工程,2011,28(9):1086-1089.
[7]罗学钢,罗 晔.直流电动机(可逆)传动调速系统调试研讨[J].机电工程技术,2013(7):173-176,196.
[8]陈敏祥,刘 宇,王宗培.新直流电动机(New DCM)的仿真模型[J].微电机,2012(3):1-4.
[9]王宗培,陈敏祥.关于直流电动机的电枢绕组及电枢电路(二)电枢主电路[J].微电机,2012(9):6-12.
[10]陈敏祥,陈 林,王宗培.新直流电动机(New DCM)电枢电路分析[J].微电机,2013(4):8-13.
[11]袁天一.新直流电动机(New DCM)的无位置传感器控制研究[D].杭州:浙江大学电气工程学院,2012.
[12]陈敏祥,袁天一,王宗培.新直流电动机(New DCM)的无位置传感器控制[J].微电机,2012,45(5):21-25,35.
猜你喜欢
火力与指挥控制(2022年5期)2022-07-25
上海大中型电机(2021年1期)2021-06-09
防爆电机(2020年4期)2020-12-14
防爆电机(2020年4期)2020-12-14
防爆电机(2020年3期)2020-11-06
河北理科教学研究(2020年1期)2020-07-24
弹箭与制导学报(2020年1期)2020-07-09
弹箭与制导学报(2019年6期)2019-06-24
城市轨道交通研究(2015年5期)2015-02-27
电工电能新技术(2012年2期)2012-07-02