
基于特征融合的雷达视频运动目标检测
2015-01-22 09:34
雷达科学与技术 2015年6期
(海军航空工程学院,山东烟台264001)
0 引言
雷达在海洋监视中发挥着至关重要的作用,运动目标检测与跟踪是雷达最基本的功能[1]。最初是由雷达操作员根据雷达屏幕上的回波信号进行海上目标检测,人工锁定目标并配合后台硬件完成目标跟踪。近年来,新型雷达大多具备了目标自动检测与跟踪功能,但在密集杂波和复杂多目标情况下,目标检测虚警率高,跟踪处理难度大,容易形成虚假航迹[2]。因此,研究一种能稳健地对海上运动目标进行自动检测的方法具有十分重要的意义。
与传统的雷达信号处理相比,将按时间顺序平面显示的雷达回波信号构成的序列看作雷达视频,从计算机视觉的角度来研究雷达目标检测,其优势在于可以综合考虑目标的时间和空间属性,提高目标检测速度和准确性[3]。目前,国内外常用的基于图像的运动目标检测方法有帧间差法、光流场法、背景差法等[4]。帧间差法利用图像序列中两帧或多帧图像之间的差异来检测运动目标,运算简单、速度快,但这种方法容易造成漏检,在目标中间形成空洞[4]。光流场法是通过计算位移向量来初始化目标轮廓,然后融合其他分割方法来检测运动目标[5],算法成熟,但其仅适用于低速单目标的检测,且计算量大,难以用于实时处理。背景差法用当前图像与背景图像进行差分,从而检测出运动目标,但在背景初始化、背景对象移位、背景更新等方面存在诸多问题[6]。不同于上述方法,本文将信息融合的思想引入雷达视频的运动目标检测,从几何形态和能量角度分别提取表征目标的有效特征,并采用D-S证据理论对其进行决策融合,获取最优决策作为运动目标的判决标准。
1 算法描述
1.1 单帧目标检测
雷达图像是灰度图像,图像中舰船目标和陆地区域灰度级较高,海面区域灰度值较低,目标与目标之间不会重叠,可以采用阈值分割的方法将疑似目标与背景分割出来。常用的阈值分割方法有全局阈值分割、Otsu阈值分割、迭代式阈值分割。本文选用迭代式阈值分割的方法对雷达图像进行分割,该方法通过迭代求取最佳阈值,具有一定的自适应性。具体步骤如下:
1)设定参数T0,并选择一个初始的估计阈值T1;
2)用阈值T1分割图像,将图像分成两部分:G1是由灰度值大于T1的像素组成,G2是由灰度值小于或等于T1的像素组成;
3)计算G1和G2中所有像素的平均灰度值μ1和μ2,以及新的阈值T2=(μ1+μ2)/2;
4)如果|T2-T1|<T0,则推出T2为最优阈值,否则,将T2赋值给T1,并重复步骤2)~4),直到获取最优阈值。
阈值分割后的雷达图像中含有一些独立的点和细小空洞,需要用形态学处理的方法进行后处理,本文采用形态学膨胀的方法填充空洞、桥接裂缝。图1为两组典型雷达视频图像数据的单帧检测结果示例,从左至右依次为原始雷达图像切片、阈值分割结果和形态学处理结果。
从图1可以看出,通过迭代式阈值分割,有效地剔除了海面杂波和噪声,但仍然无法确定检测结果中的疑似目标是否为运动目标,需要进一步作出判断。
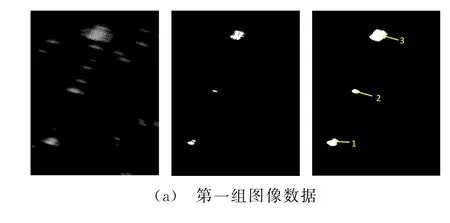
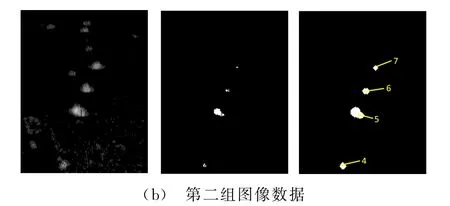
图1 典型雷达图像单帧检测结果示例
1.2 多帧积累
雷达视频即为按时间顺序构成的雷达图像序列,如果综合考虑连续多帧雷达图像的检测结果,就可以更加充分地利用单帧检测结果中包含的目标形状、位置等信息。在对连续多帧检测结果进行处理的过程中,可以容易地将那些突然出现于某一帧,但后面连续多帧均未出现的疑似目标判断为虚警,并加以排除。
在排除虚警的同时,如果将连续多帧的检测结果进行积累,获取目标的历史轨迹,就能够根据运动目标轨迹与静止目标轨迹的不同特点,进行特征提取,为运动目标的检测提供依据。假设第i帧检测结果为I i,则连续i帧积累结果为

图2为图1中的检测结果连续积累20帧后的效果,标注区域为第20帧的检测结果。
图2 典型雷达图像多帧积累结果示例
1.3 目标特征提取
观察图2可以发现,运动目标和静止目标最直观的差异就是目标轮廓在目标轨迹中所占的比例大小。另外,从能量角度,运动目标和静止目标的能量分布也会有所不同。下面综合利用目标的单帧检测结果和多帧积累结果,提取目标的面积变化比和能量密度作为运动目标检测的基本特征标准。
1.3.1 面积变化比
目标轮廓在目标轨迹中所占的比例大小,可引入面积变化比这一概念对其加以描述。本文将面积变化比定义为当前目标面积与当前积累的目标轨迹连通区域面积的比值。雷达图像经阈值分割后为二值图像,目标面积即为目标在二值图像中所占的像素点个数。计算公式如下:

则目标第i帧的面积变化比为

式中,A i为第i帧目标面积,Asi为前i帧目标积累后的连通区域面积。
1.3.2 能量密度
对于静止目标,目标位置基本不变,雷达连续辐射电磁波会在目标区域积聚能量,而运动目标的位置持续变化,能量会分散在目标轨迹中。因此,运动目标和静止目标的能量分布情况必定存在差异。本文引入能量密度这一概念来描述目标的能量分布情况。反映在二值化后的雷达图像上,能量也可以用像素点个数定量描述,将目标第i帧的能量密度Pri定义为

1.4 特征决策融合
决策级图像融合是指对每个图像的特征信息进行分类、识别等处理,形成了相应结果后,进行进一步融合的过程,是一种更高层次的信息融合,最终的决策结果是全局最优决策[7]。决策级融合多采用各种不确定性推理技术,本文采用基于D-S证据理论的方法对1.3节提取的目标面积变化比和能量密度进行决策融合,融合的结果作为运动目标的最终判决标准。
1.4.1 D-S证据理论
D-S证据理论是一种非精确推理方法,它将来自两个或多个证据体的置信函数通过一定组合融合起来,得到一个新的置信函数作为判决依据,该理论在区分不知道、不确定以及正确反映证据收集方面具有很强的灵活性[8]。
假设Θ为一识别框架,C为该识别框架Θ的子集,则函数m∶2Θ→[0,1],在满足下列条件:时,称m(C)为C的基本概率赋值(Basic Probability Assigment,BPA)。当C≠Θ时,m(C)表示对C的精确信任程度,即对C的直接支持;当C=Θ时,m(Θ)表示证据的不确定性。
D-S组合规则:设同一识别框架Θ上两个性质不同的证据C和D,其基本概率赋值分别为m1和m2,则有如下组合公式:
式中,K表示归一化因子。若K≠1,则m确定一个组合基本概率赋值;若K=1,则认为m1,m2矛盾,不能对基本概率赋值进行组合。
1.4.2 BPA构建
在用D-S证据理论对面积变化比和能量密度进行特征决策融合前,需分别构建Ari和Pri的基本概率赋值函数。在分析大量雷达图像切片数据的基础上,结合Ari和Pri的物理意义,可以得出Ari和Pri对应的运动目标概率分段函数y1,y2,并给出相应的置信度Q1,Q2。则BPA为

式中,1-Q i表示运动目标检测的不确定信息,需要配合辨识框架Θ,并结合式(7)进行决策融合。
1.4.3 最优决策规则
特征决策融合的结果是全局最优决策,即运动目标的最终判决标准。设∃B1,B2⊂Θ,满足:

若有

则B1为最优决策,其中ε1,ε2为预先设定门限,本文设定ε1=0.9,ε2=0.1。
1.5 检测流程
经过前面的分析,给出完整的运动目标流程,如图3所示。首先用迭代式阈值分割法对单帧雷达视频图像进行处理,并用形态学膨胀的方法填充细小空洞,检测出疑似目标。然后将连续多帧的检测结果进行积累,并综合单帧检测结果和多帧积累结果提取出目标的面积变化比和能量密度特征。最后将目标的面积变化比和能量密度输入D-S决策融合结果,如果满足最优决策,则将该目标判定为运动目标,否则,继续对下一单帧检测结果进行积累,直到所有图像处理完毕。
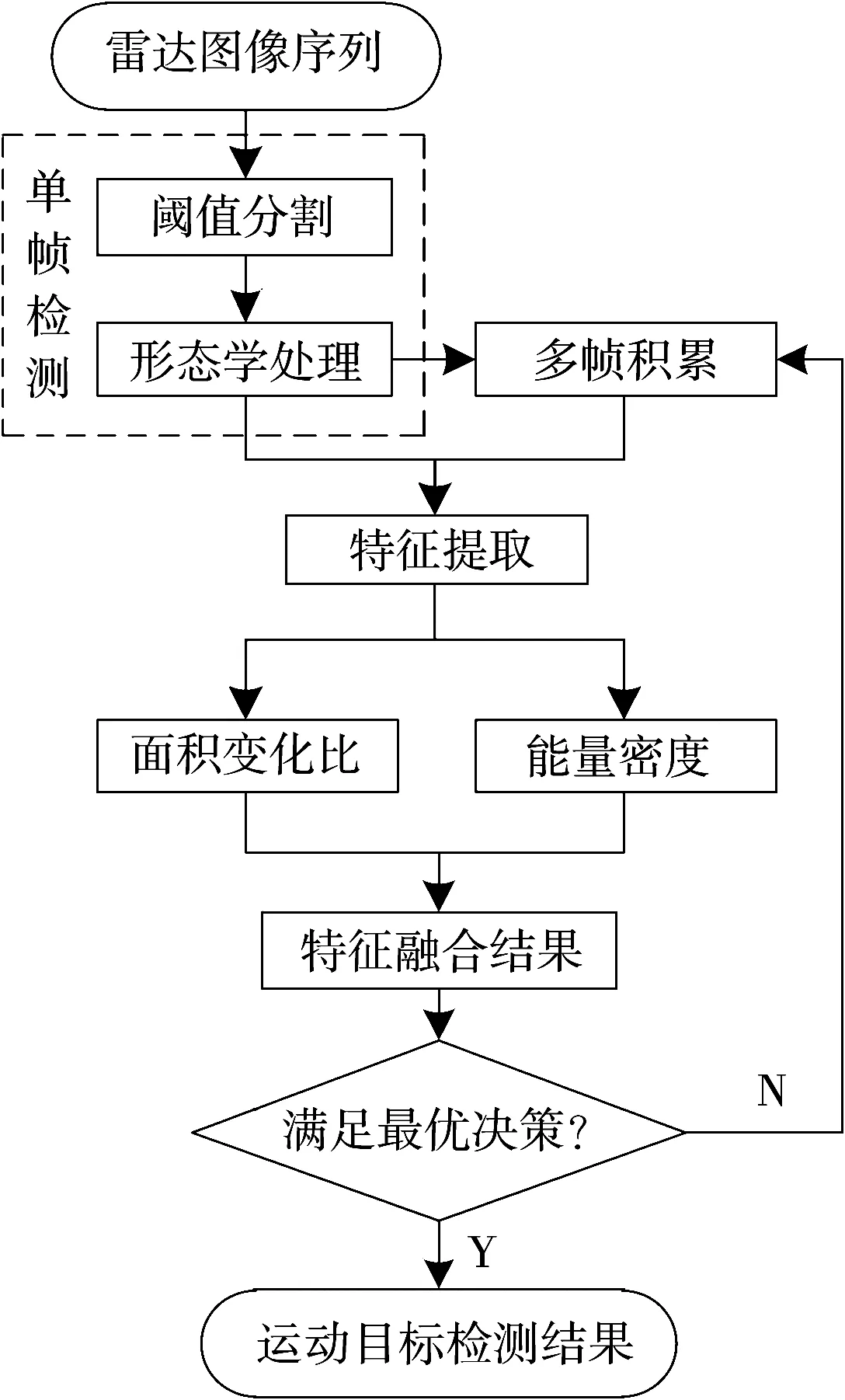
图3 运动目标检测流程
2 实验结果与分析
在Matlab 2010平台上编程实现上述算法,选取固定架设的某型导航雷达上采集的部分实测数据作为实验数据。该雷达距离分辨率为75 m,数据采集时每个方位平均采样8次,距离上采样间隔为5 m,共采集图像300帧。其中前200帧用于先验分析,获取最优决策,后100帧用于算法验证。
先验分析阶段,在面积变化比和能量密度的提取过程中,由于存在多个目标,会出现目标位置交叉、目标突然消失或出现等复杂情况,本文利用目标的质心位置对各目标进行了关联。为便于说明,从原始雷达图像中裁切出两组子图像数据(如图1所示),图4和图5分别给出了两组数据前50帧的面积变化比和能量密度曲线,对于某一两帧突然消失后面又出现的目标,沿用了前一帧的提取结果。
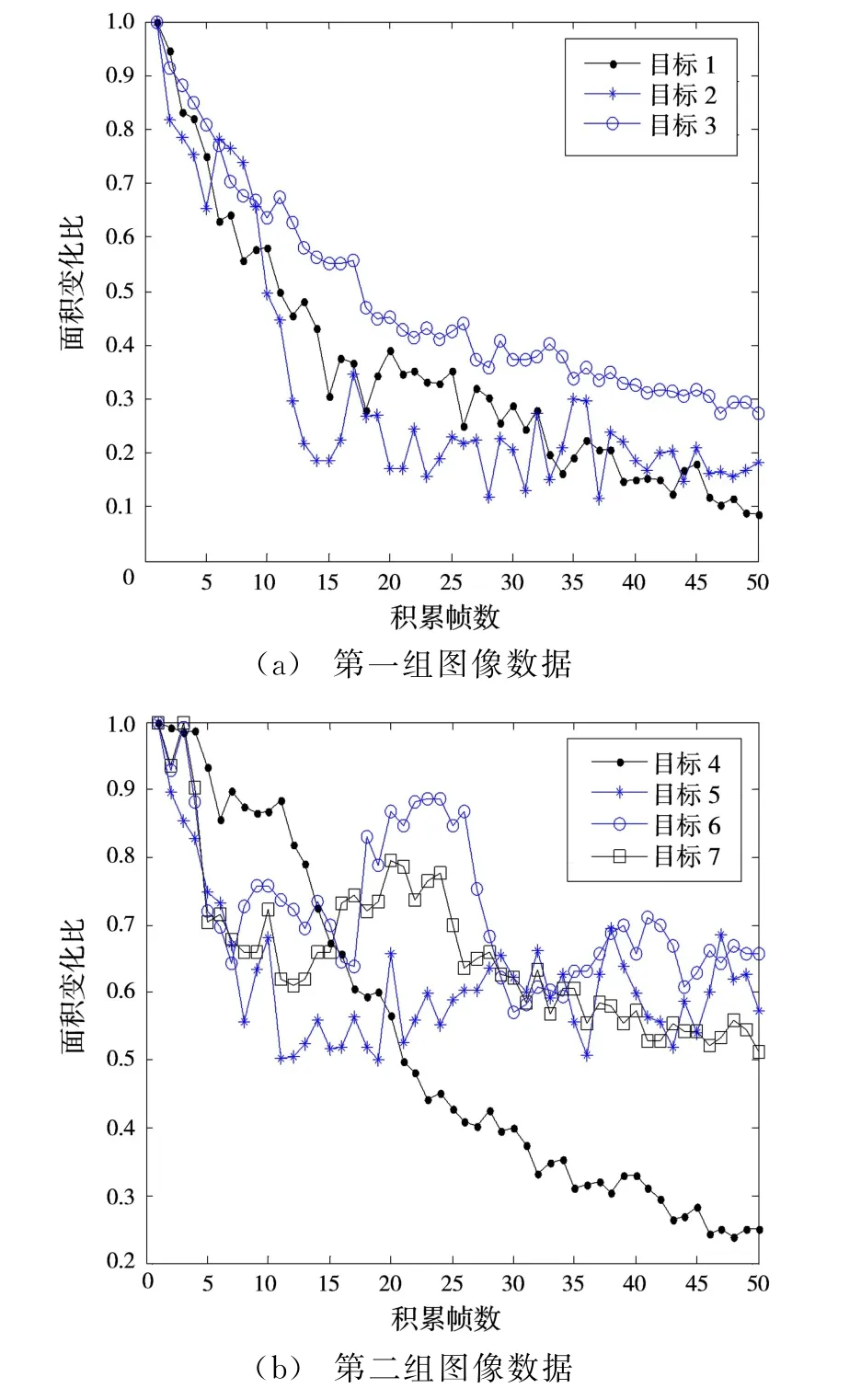
图4 目标面积变化比曲线
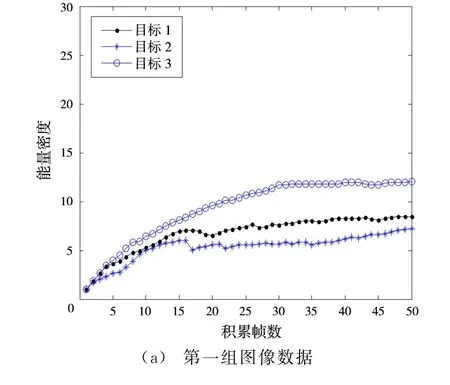
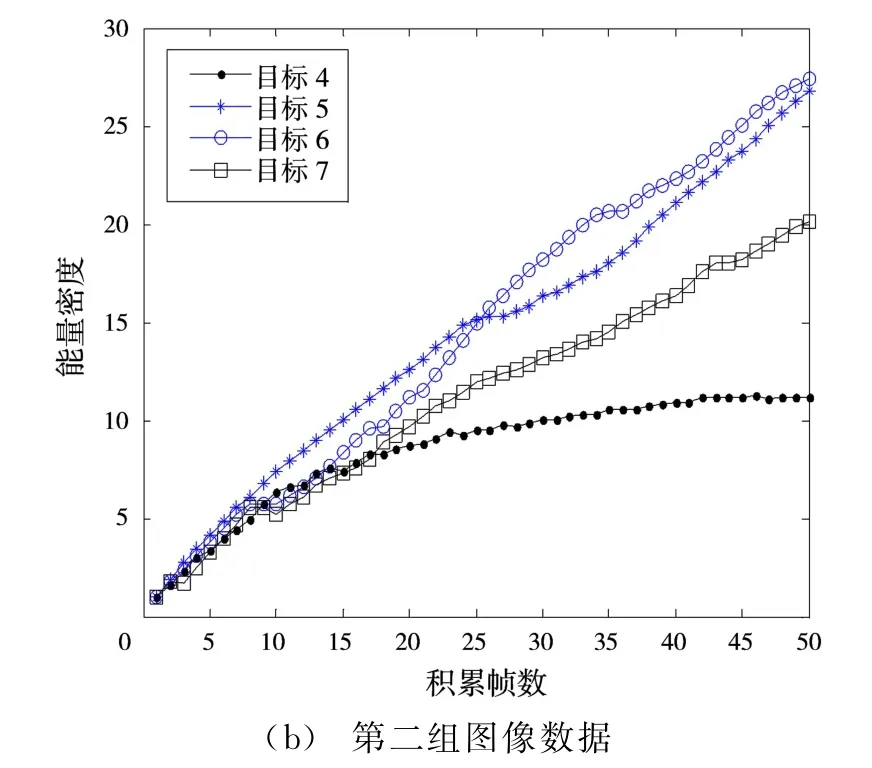
图5 目标能量密度曲线
分析图4和图5,可以看出随着积累帧数的增加,目标1,2,3,4的面积变化比从1开始一直呈递减趋势,能量密度从1开始小范围增加并逐渐稳定在10左右的某个数值;目标5,6,7的面积变化比存在波动,无明显规律,但均在0.5以上,能量密度从1开始持续递增。在理想情况下,根据面积变化比和能量密度的物理意义,运动目标的面积变化比应从1开始持续递减,并越来越接近于0,能量密度应稳定在某个固定值附近;而静止目标的面积变化比应接近于1,能量密度应持续递增。但对于实测数据,由于目标起伏的影响,连续两帧图像中同一目标的面积不一定相同,且对原始图像进行二值化处理会在一定程度上造成能量衰减,这些因素导致提取出的特征值与理想状态存在差异,但其满足基本变化规律,不会对实验结果产生严重的影响。
通过对前200帧雷达图像进行分析,并结合人工判读结果,可以确定面积变化比和能量密度的运动目标概率分段函数分别为
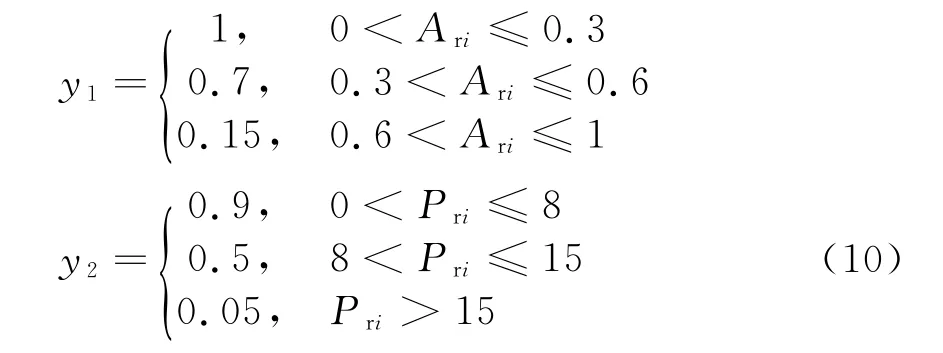
以及对应的置信度

将式(10)、(11)代入式(6)和式(7),所有的K均小于1,满足组合条件。通过式(5)得到的组合结果为
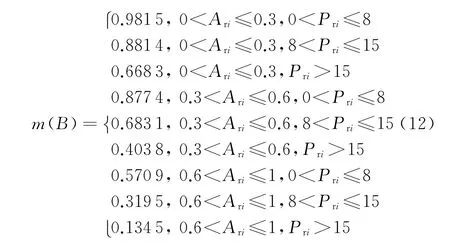
式中,m(B1)=0.981 5,m(B2)=0.881 4,将其代入式(11),符合最优决策规则。所以最优决策为

即当目标的面积变化比和能量密度满足式(13)时,将其判断为运动目标。
下面用后100帧雷达图像对算法进行验证。观察图4和图5中曲线可以发现,前10帧图像中提取的特征值不稳定,不能作为判断依据,因此,从第211帧开始输出运动目标检测结果,图6给出了其中几个关键帧的检测结果。
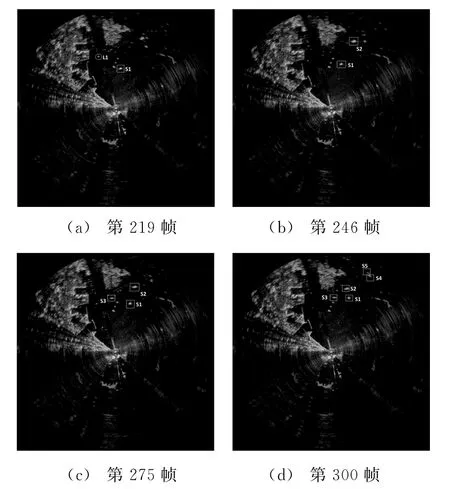
图6 运动目标检测结果
由图6的检测结果可知,用本文算法依次检测出S1,S2,S3,S4,S5五个运动目标,根据人工判读结果,到第300帧图像处理完毕时,除第219帧中的L1由于仅出现几帧就迅速消失导致漏警外,其余运动目标均被有效检测出。因此,本文检测算法虚警率较低,对于稳定、慢速运动目标具有较好的检测效果,有效解决了密集杂波和复杂多目标情况下,雷达自动检测与跟踪容易产生虚假航迹的问题,但对于机动、快速运动目标的检测性能有待进一步提高。
3 结束语
本文将信息融合的思想引入雷达视频的运动目标检测,综合目标的单帧检测结果和连续多帧积累结果,提取了两个表征目标的有效特征,并用证据理论对其进行融合,得到了最优决策准则作为运动目标自动检测的依据。利用实测数据进行的实验表明了本文方法的有效性。后续将考虑提取更多的目标特征进行融合,以提升该算法对机动快速运动目标的检测性能。同时,把该算法与跟踪算法结合起来考虑,并逐步应用于实际的雷达系统,也是我们下一步要努力的方向。
[1]徐恒.基于船载雷达图像的海上目标检测技术研究[D].武汉:武汉理工大学,2012.
[2]何友,关键,孟祥伟,等.雷达目标检测与恒虚警处理[M].2版.北京:清华大学出版社,2011:6-9.
[3]周伟,何东亮,关键,等.基于视觉显著性的雷达视频舰船检测[J].雷达科学与技术,2012,10(1):54-58,63.
[4]柯天兵,李永倩.电力系统视频监控中目标检测与跟踪算法研究[J].电力科学与工程,2014,30(1):42-46.
[5]BAO W,LI H,LI N,et al.A Liveness Detection Method for Face Recognition Based on Optical Flow Field[C]∥International Conference on Image Analysis and Signal Processing,Taizhou,China:IEEE,2009:233-236.
[6]胡彪,龚晓峰.基于改进背景差法的运动目标检测[J].计算机工程与设计,2010,31(17):3841-3844.
[7]何友,王国宏,关欣,等.信息融合理论及应用[M].北京:电子工业出版社,2010:329-331.
[8]YIN S,LIU Y,HUO K.Multi-Sensor Fusion Recognition Method Based on Improved D-S Evidence Theory[C]∥International Conference on Information and Communications Technologies,Nanjing,China:IET,2014:1-7.
猜你喜欢
建材发展导向(2021年19期)2021-12-06
纺织科学研究(2021年9期)2021-10-14
临床骨科杂志(2020年1期)2020-12-12
电子制作(2019年15期)2019-08-27
中学生数理化·七年级数学人教版(2019年6期)2019-06-25
小学生学习指导(低年级)(2018年12期)2018-12-29
决策(2018年8期)2018-12-10
小天使·四年级语数英综合(2018年1期)2018-07-04
火控雷达技术(2016年3期)2016-02-06
探测与控制学报(2015年4期)2015-12-15
