
Ku波段SAR抛撒雷目标方位特性研究
2015-01-22 09:34孙涵涛常文革刘兆和
雷达科学与技术 2015年6期
孙涵涛,常文革,刘兆和
(1.国防科技大学电子科学与工程学院,湖南长沙410073;2.近地面探测与感知技术国防重点实验室,江苏无锡214035)
0 引言
为了适应现代高技术局部战争战场,布雷手段也更加多样化。例如采用火箭布雷、火炮布雷、飞机布雷和导弹布雷等方式。地雷撒布在地表,这为高波段SAR实现抛撒雷目标检测提供了可能。然而,地雷检测作为一项世界性难题[1],利用高波段SAR实现抛撒雷检测具有许多困难,譬如,地雷目标的雷达散射截面(Radar Cross Section,RCS)小,是极其微弱的雷达目标,同时地表还存在着杂草、石块、树桩等杂物,这些因素使抛撒雷检测异常困难。因此,抛撒雷检测是一个典型的强杂波环境下的小目标检测问题。
在SAR探雷领域,目前的研究更多是关注超宽带低波段SAR条件下浅埋地雷的探测,对高波段下抛撒雷目标特性的分析研究较少,而目标特性分析是实现有效检测的基础。因此,考虑到抛撒雷近似于圆柱体的特点,而大多数目标不具备这样的特点,在国防科学技术大学研制的Ku波段微小型化合成孔径雷达系统实测数据的支持下,本文对抛撒雷的方位特性进行分析和研究。
首先,本文通过子孔径成像处理算法,得到子孔径图像序列。然后,在子孔径图像序列中提取目标幅度和相位信息,研究分析了抛撒雷目标方位不变性和方位相干性。最后,为了验证分析结果,在CFAR检测的基础上结合方位相干性特征,以CFAR-IHP检测算法实现地雷目标检测。实验结果显示,地雷目标的方位不变性有利于降低虚警概率。
1 子孔径处理
本文首先通过获得子孔径图像序列来分析目标方位散射特征[2-3]。
由成像原理可知,方位向的多普勒频率与方位向视角的关系如下:

式中,fd为方位向多普勒频率,v为载机运动速度,λ为波长,φ为方位向视角。因此,不同的方位视角对应不同的多普勒频率。对应的关系图如图1所示。
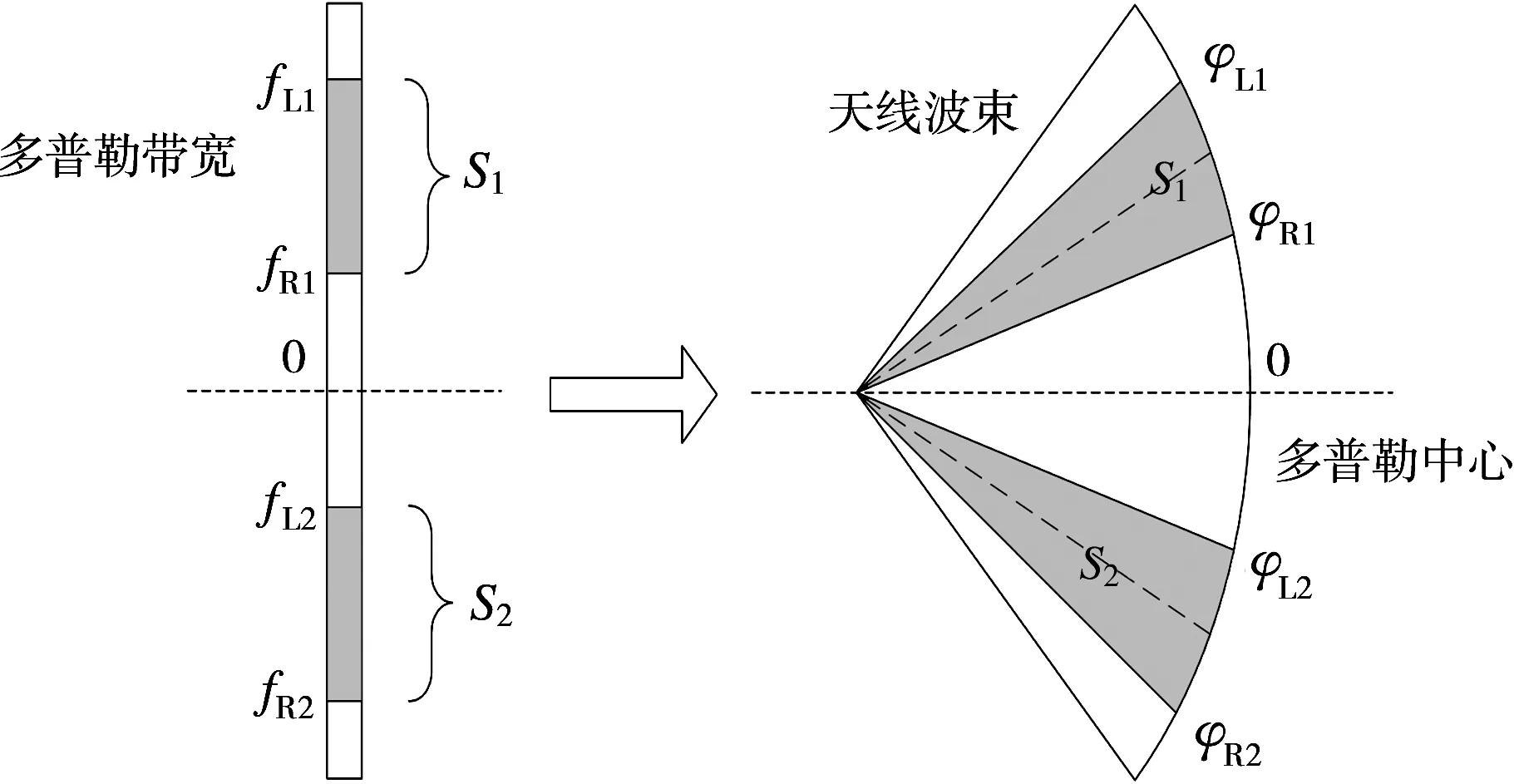
图1 多普勒频率与方位视角的对应关系
通常,子孔径图像生成有两种方式,第一种是对原始回波数据,在成像处理前对多普勒频谱进行子孔径划分,然后分别进行成像处理;第二种是对单视复图像数据(Single Look Complex,SLC),将成像处理后得到的复图像在方位向进行傅里叶变换到距离-多普勒域,然后进行子孔径分割,再进行逆傅里叶变化就得到子孔径图像。本文采用第二种方法,具体处理流程如图2所示。
由于不同方位角对应的目标距离不同,再加上天线方向图的加权影响,使得各个子孔径的功率分布并不均匀。以实测数据为例,本文对距离向平均后,沿多普勒域,画出距离向平均幅度值,得到如图3所示结果。该图表示不同方位角视角下回波能量的分布情况。从图3可见,对应于不同的多普勒频率,回波能量很不均匀。因此,为了便于子孔径处理,必须消除该现象。具体采用如下方法[4]:1)在距离-多普勒域进行权重函数的估计,权重函数的幅度可以由距离向幅度值的平均得到;2)计算权重函数的逆函数并归一化,得到校正函数;3)将校正函数作用于图像距离-多普勒域,即可消除权重的影响。实验发现,在权重函数的估计中,为避免强目标对其估计精度的影响,应选择对地物均匀的区域求平均而不是对整个距离向求平均。图4为经过权重消除前后,在一维方位剖线上不同方位视角下回波能量的分布对比,可以看出,加权影响得到了较好的校正。
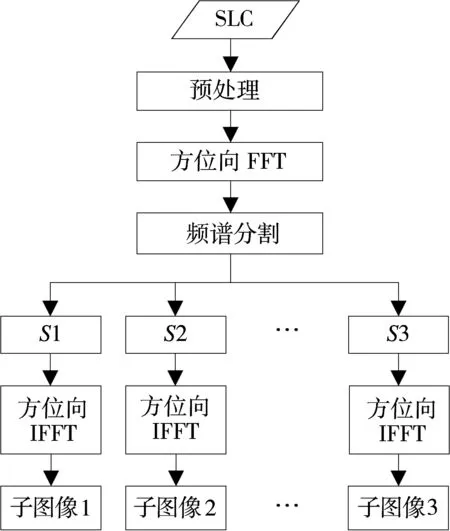
图2 子孔径图像序列生成
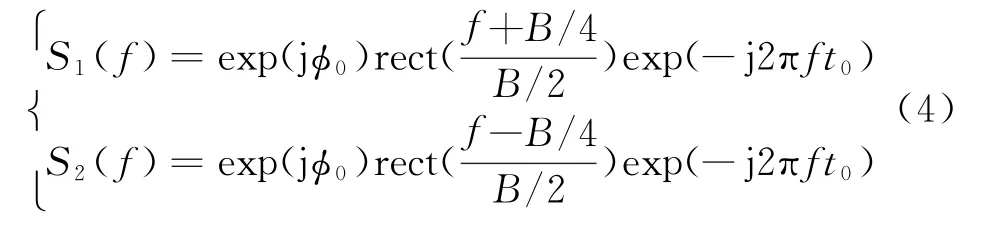
此外,在形成子孔径图像时,还需要将它们的频谱重叠[4]。假设距离雷达r0处有一点目标,则匹配滤波后信号响应有如下形式:

式中,B为信号带宽,t0=2r0/c,ϕ0为一个常数,s(t)的Fourier变换为

作频谱分割,B/2频宽的子孔径图像s1和s2有如下的Fourier变换:
对应时域为
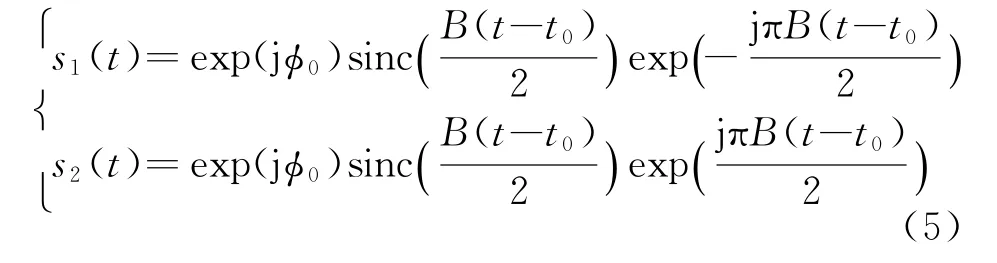
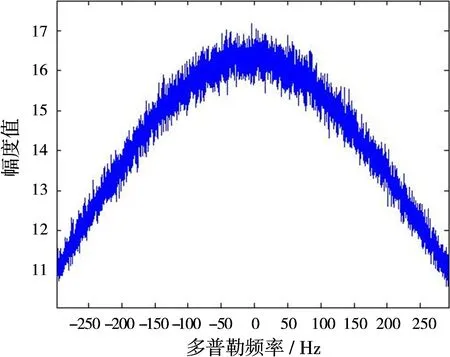
图3 方位幅度谱
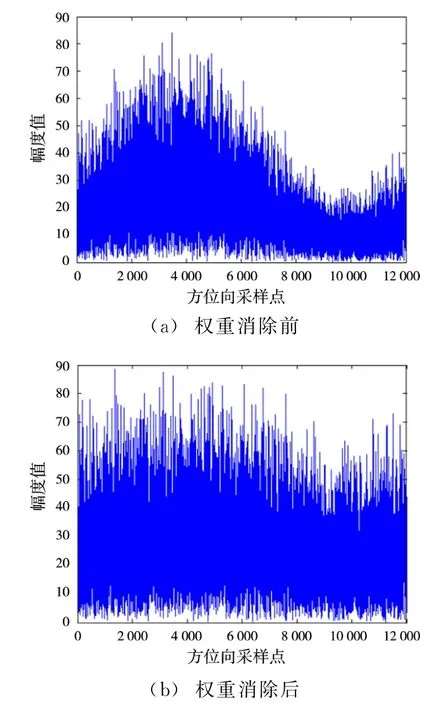
图4 权重消除前后方位向幅度值比较
2 目标方位特性分析
2.1 方位不变性分析
如图5所示,从物理形态上看,圆柱体目标各个方向RCS相同,不同方位角下回波能量基本相同,具有方位不变性[5-6]。地雷光学图片如图6所示,地雷近似为一个圆柱体,因此,本文分析其方位不变性。
场景布置如图7所示,放置目标包括抛撒雷、9.5 cm三角角反射器、10 cm直角角反射器,放置背景为沥青背景和杂草背景,抛撒雷直径约为10 cm、高约为15 cm。
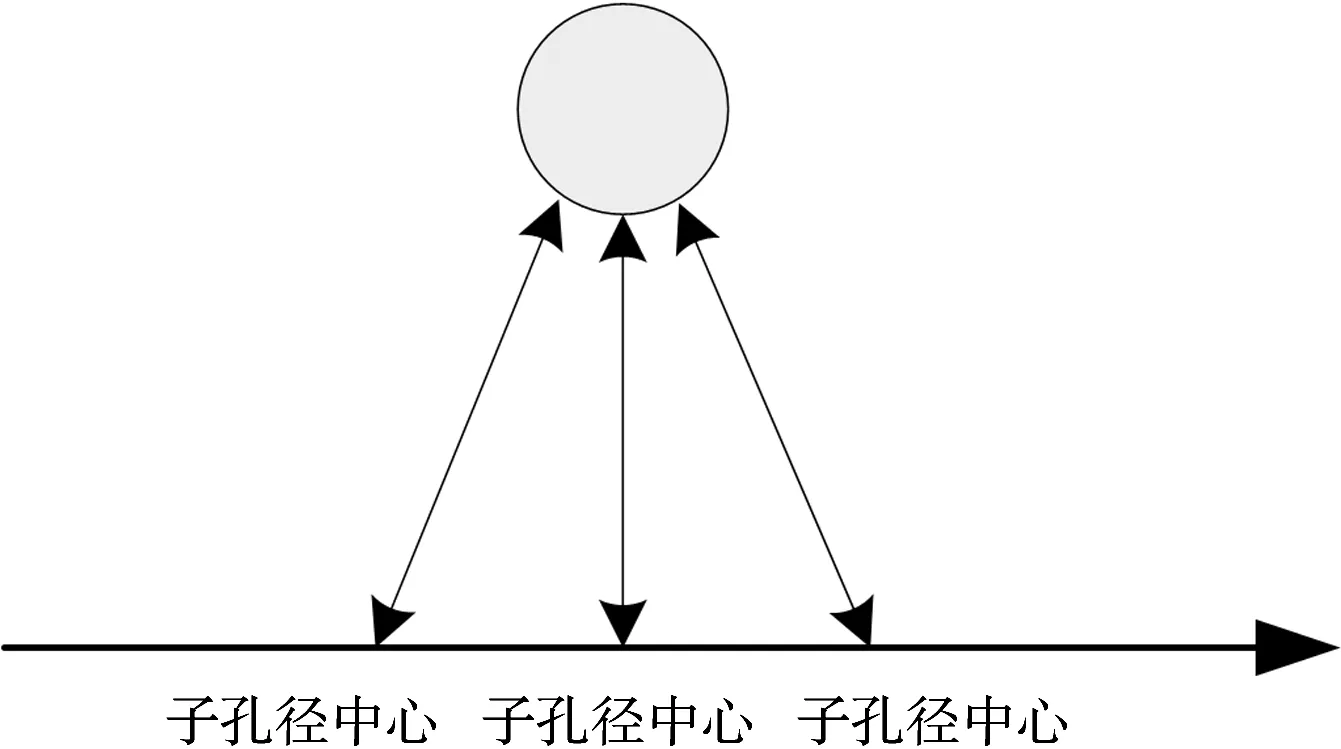
图5 圆柱体方位不变性示意图

图6 地雷光学图片

图7 目标布置示意图
图8为实测数据进行子孔径处理得到的子孔径图像序列(为了便于显示,图中只截取了部分场景,包括一个直角反射器和一颗抛撒雷,在图中分别对应上下两个亮点)。子孔径图像分辨率为0.3 m×0.3 m,图像聚焦效果良好,波束宽度约为10°。
提取每幅子孔径图像中地雷散射中心和角反射器散射中心处的幅度值,以及地物杂波散射幅度值得到方位向散射特征图,如图9所示。分别对抛撒雷、三角角反射器、直角角反射器、杂草进行统计分析。文献[7]中指出,直角角反射器波束角约为25°,三角角反射器波束角约为40°,10 cm直角角反射器的RCS大约是9.5 cm三角角反射器的两倍。图9中这两个角反射器也是相差6 dB左右,说明实测结果与理论结果一致性较好。从图9中还可以发现,在雷达波束宽度范围内,抛撒雷目标的方位不变性相对于角反射器,其方位不变性略差。这是由于抛撒雷在物理形态上并不是理想圆柱体目标的因素引起的。因此,只是利用方位散射幅度信息对于地雷目标的检测而言仍然存在困难。
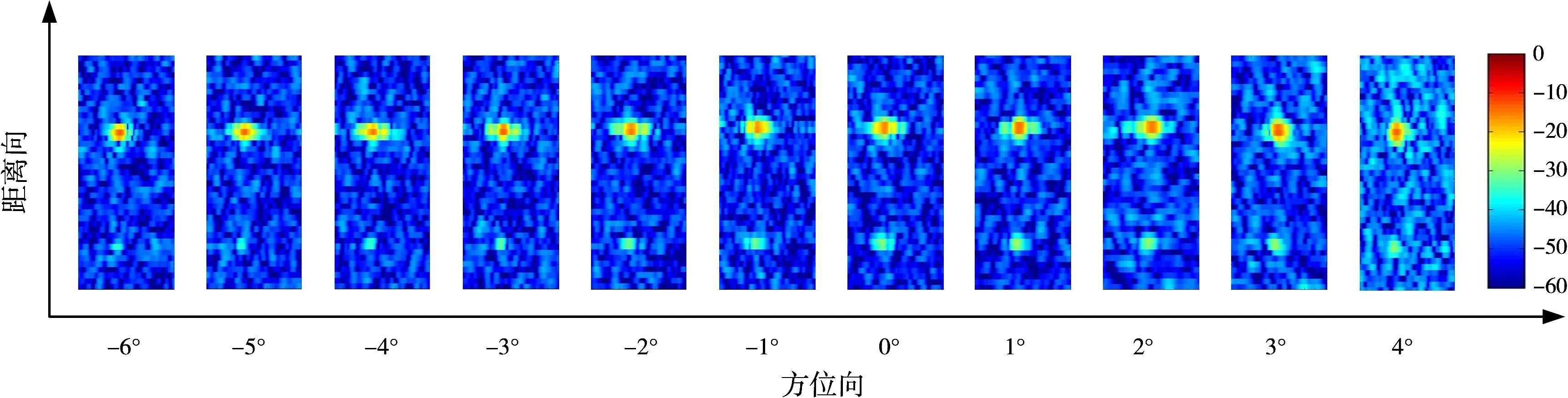
图8 子孔径图像序列(截取部分场景)
图9 方位散射特征图
2.2 方位相干性分析
由人造目标和自然地物的散射特性可知,在方位向上,目标在很大的角度失配范围内都具有强相干性,而自然地物需要亚象元级的配准才能形成强相干[8]。因此,可以分析抛撒雷目标的方位相干性。
计算相关性时一般采用下式:

分别求取不同子孔径间隔下抛撒雷、三角角反射器、直角角反射器和杂草的相干系数值,得到如图10的结果。从图中可以发现,人造目标包括抛撒雷和角反射器方位相干性明显高于杂草背景,但是抛撒雷和角反射器之间方位相干性没有明显的区分。
考虑到幅度信息和相位信息在目标检测中都非常重要,为了更好地获取这两部分信息,可以用内厄密积(Internal Hermitian Product)[4]来计算相干系数:

式中,〈·〉表示空间领域平均。图11为用内厄密积计算相干系数取对数(dB)到的结果。可以发现,抛撒雷和角反射器目标随子孔径间隔增加方位相干性减小较为缓慢,而杂草背景随子孔径间隔增加方位相干性减小较为迅速。因此地雷、角反射器与杂波相比,方位相干性差异较为明显,在较宽的波束范围内,抛撒雷和角反射器目标之间有相似的变化趋势。
理论上,在较大积累角条件下,如在聚束SAR和圆周SAR条件下,方位向波束角较大。此时子孔径间隔可以取到很大。当子孔径间隔大于角反射器波束角时,角反射器相干系数将会急剧下降,而抛撒雷相干系数将不会有明显变化,这将有利于进一步区分抛撒雷和角反射器目标。
图10 方位相干性对比
图11 内厄密积计算相干系数结果对比
3 检测实验
CFAR检测是目前发展较为成熟、应用较为广泛的目标检测方法,它是基于图像对比度特征的一类检测方法,即根据目标和杂波的幅度或强度差异进行检测[9-10]。本文在CFAR检测基础上,结合方位相干性,通过CFAR-IHP方法对目标进行检测,其算法流程如图12所示,其中,⊗表示对应元素相乘,门限值为经验值。
图12 CFAR-IHP检测流程
图13为场景成像结果。图14给出了CFAR检测(图14(a))和CFAR-IHP检测结果(图14(b))情况对比。CFAR检测时,为了保证检测概率的同时使虚警尽量减少,比较不同虚警概率下的检测结果后设置虚警概率为Pfa=10-2。
比较图14(a)和图14(b)可以看出,加入方位相干性特征后,虚警明显减少。其中左上角3个虚警为人造目标,为机场指示牌。对CFAR检测结果中的抛撒雷目标、角反射器和部分地物杂波的相干系数进行统计得到如表1所示的结果。
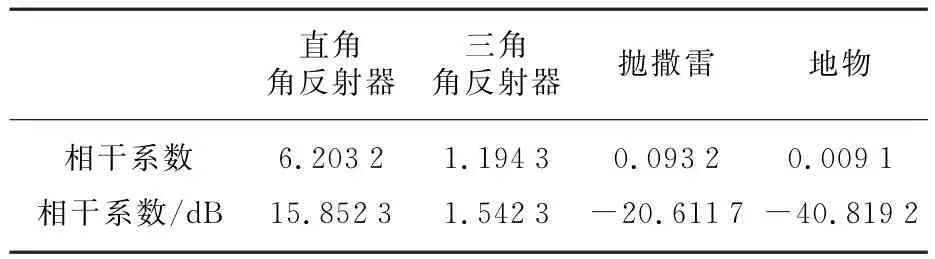
表1 相干系数比较
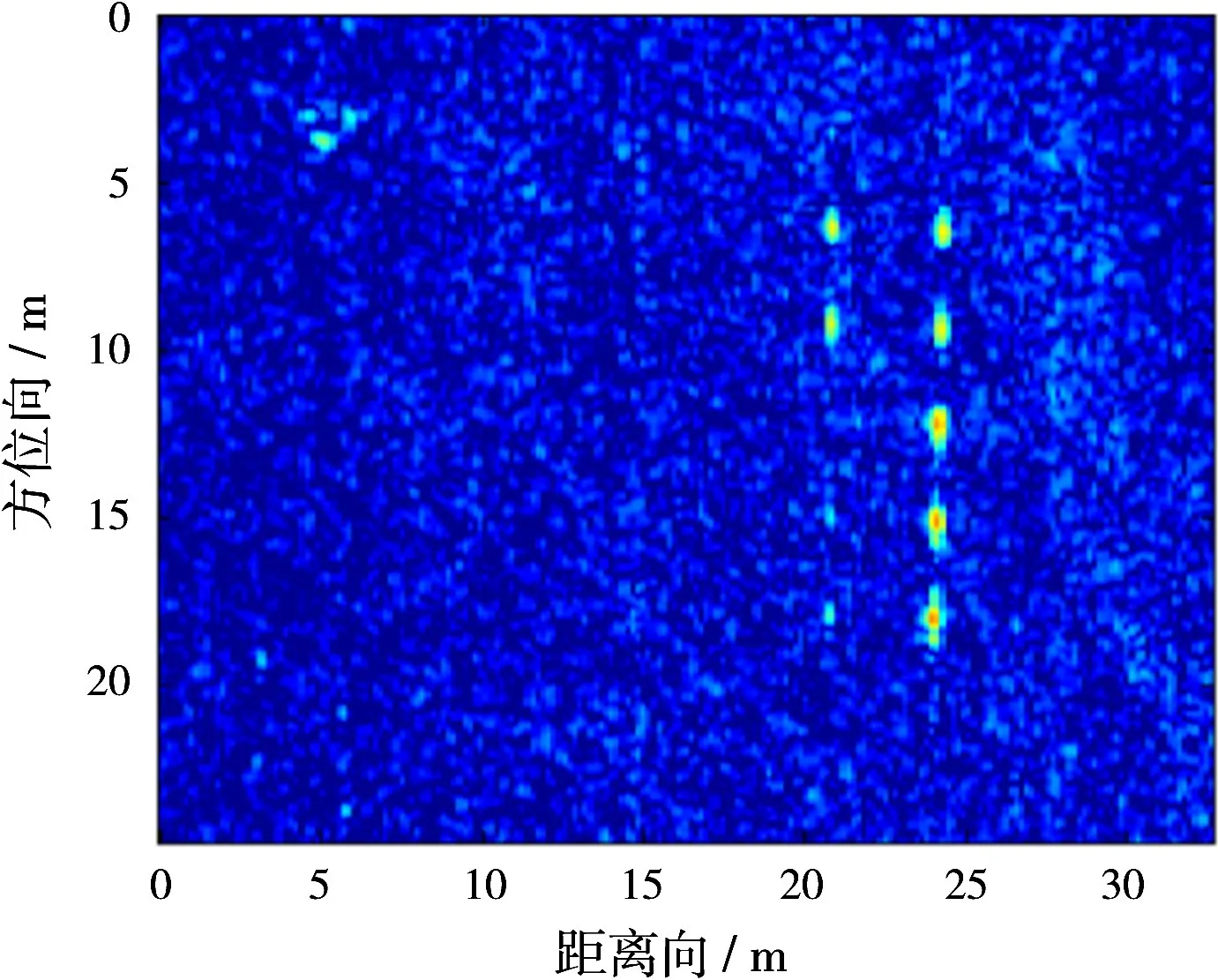
图13 成像结果
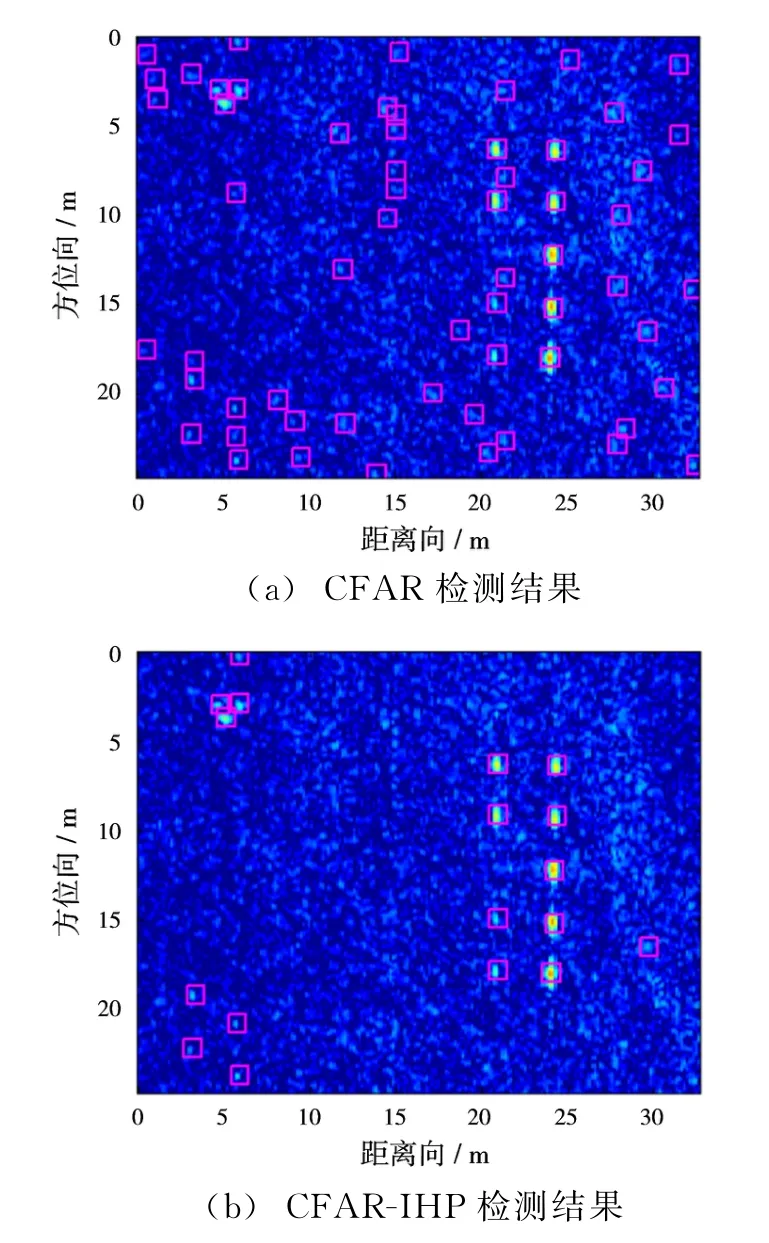
图14 CFAR和CFAR-IHP检测结果对比
4 结束语
本文基于Ku波段SAR实测数据,首先介绍了子孔径处理方法,并通过该方法得到了子孔径图像序列,从而对高波段下抛撒雷等目标的方位散射特征和方位相干性特征进行了分析。最后结合CFAR检测和方位相干性提出了CFAR-IHP检测算法,验证了方位相干性在高波段SAR抛撒雷目标检测中的可行性和有效性。实测数据结果表明,方位相干性特征有助于降低抛撒雷检测中的虚警。
在本文研究中,由于高波段SAR天线波束角较小,在条带式成像模型下,获取的目标方位信息还不够丰富。为了获取更加丰富的方位信息,将考虑聚束SAR和圆周SAR条件下抛撒雷目标方位特性研究。这些研究将是下一步的研究内容。
[1]SCHREINER K.Landmine Detection Research Pushes Forward,Despite Challenges[J].IEEE Intelligent Systems,2002,17(2):4-7.
[2]梁福来,宋千,王玉明,等.基于方位散射熵的旋转体目标增强成像[J].电子与信息学报,2013,35(6):1442-1448.
[3]WANG T,KELLER J M,GADER P D,et al.Frequency Subband Processing and Feature Analysis of Forward-Looking Ground-Penetrating Radar Signals for Land-Mine Detection[J].IEEE Trans on Geoscience and Remote Sensing,2007,45(3):718-729.
[4]SOUYRIS J C,HENRY C,ADRAGNA F.On the Use of Complex SAR Image Spectral Analysis for Target Detection:Assessment of Polarimetry[J].IEEE Trans on Geoscience and Remote Sensing,2003,41(12):2725-2734.
[5]王鑫运,宋千,张汉华,等.基于方位不变性的SAR图像旋转体检测[J].雷达科学与技术,2014,12(4):395-405.WANG Xin-yun,SONG Qian,ZHANG Han-hua,et al.Body-of-Revolution Target Detection Algorithm Based on Aspectual Invariance in SAR Image[J].Radar Science and Technology,2014,12(4):395-405.(in Chinese)
[6]王玉明,施云飞,王建,等.基于方位特征序列的地雷鉴别算法[J].国防科技大学学报,2013,35(6):88-95.
[7]黄培康,殷红成,许小剑.雷达目标特性[M].北京:电子工业出版社,2005:54-61.
[8]皮亦鸣,杨建宇,付毓生,等.合成孔径雷达成像原理[M].成都:电子科技大学出版社,2007:188-189.
[9]王鑫运.基于机载SAR图像的地雷目标检测技术研究[D].长沙:国防科学技术大学,2014.
[10]魏中平.基于CFAR的SAR目标检测[J].电子科技,2013,26(3):26-29.
猜你喜欢
幼儿园(2021年12期)2021-11-06
数字海洋与水下攻防(2020年5期)2021-01-04
空间科学学报(2020年3期)2020-07-24
小型内燃机与车辆技术(2020年1期)2020-03-27
汽车电器(2019年1期)2019-03-21
CHINESE JOURNAL OF AERONAUTICS(2017年5期)2017-11-17
雷达学报(2017年1期)2017-05-17
火控雷达技术(2016年2期)2016-02-06
安徽医科大学学报(2015年9期)2015-12-16
小学生时代·大嘴英语(2015年7期)2015-11-23
