
七相逆变器有限控制集模型预测控制技术研究
2015-01-15 05:39张艳东郭冀岭
电源学报 2015年4期
张艳东,陆 可,郭冀岭
(西南交通大学电气工程学院,成都 610031)
引言
与传统三相交流调速系统相比,多相电机交流调速系统具有低电压大功率、系统可靠性高以及电磁转矩脉动小等优点,尤其在供电电压等级受到限制的场合,多相电机交流调速系统优势更加突出[1-2]。由于七相异步电机为质数类电机,缺相运行的多种情况更具有代表性,因此近年来受到学者更多关注[3]。七相异步电机逆变驱动系统空间矢量众多,而且需要考虑子空间谐波电流的抑制问题,三相SVPWM和PWM调制策略不能直接引入七相逆变系统中,为此国内外诸多学者对七相逆变器的调制技术进行了大量研究。
文献[4]根据空间解耦思想,提出了一种消3、5次谐波的七相SVPWM调制技术,谐波消除效果显著,但需要在每个开关周期内根据参考空间矢量位置选择6个特定矢量,并计算每个矢量作用时间,策略复杂;文献[5]针对七相电压源型逆变器提出的SVPWM引入了电压矢量作用占空比的概念,简化了计算,但对谐波问题考虑较少;文献[6]提出了一种消除谐波的七相载波型UVM方法,该法将空间解耦模型与七相载波型 UVM相结合同时追加谐波空子间电压为零的约束条件,取得良好的消谐效果,增强了调制范围,但需要PI调节器较多,系统的调试复杂;文献[7-8]提出基于有限控制集模型预测控制方法FCS-MPC(finite control set model predictive control),并成功将其应用于三相电压源型逆变器中;文献[9]对应用FSC-MPC控制方法的三相电压源型逆变器进行了深入的研究,证明了在三相电压源型逆变器电流控制方面,FSC-MPC控制方法的具有比PI控制的SVPWM方法更好的动静态性能,而且FSC-MPC控制方法具有更强的鲁棒性;文献[10-11]以五相系统为例,对应用FSC-MPC控制方法的多相系统进行了研究,验证了在多相驱动系统中,FSC-MPC控制方法能够得到很好的瞬态性能,稳态性能总是优于PI控制的SVPWM方法,而且具有更大的电流控制带宽。
本文将FCS-MPC思想引入七相电压源型逆变系统中,选取几组特殊的非零空间矢量和1个零矢量为备选矢量,构造合适的目标函数和采样时间,实现了对给定电流的良好跟踪以及对谐波电流的良好的抑制效果。在此基础上,进一步研究了目标函数、空间矢量数目以及采样时间等因素对控制性能的影响。
1 七相逆变器有限控制集模型预测电流控制原理
1.1 控制策略
本文将有限控制集模型预测控制应用于七相电压源型逆变器的电流控制中,负载采用对称的阻感负载,旨在得到负载电流良好的动静态性能和消谐效果。其控制原理如图1所示,其中,预测模型部分根据当前采样的负载电流和备选的空间矢量预测下一采样时刻所有备选矢量对应的负载电流值;目标函数最优控制部分根据所有预测的负载电流的值和电流指令进行计算,找到使目标函数最小的电流预测值所对应的最优电压矢量,进而作用在逆变器,对负载电流进行控制,以达到控制目的。

图1 七相电压型逆变器阻感负载FCS-MPC电流控制原理Fig.1 FCS-MPC for seven-phase voltage source inverter with RL load
1.2 预测模型
通过广义派克变换矩阵,可将七相自然坐标系变换得到新坐标系,其由零序子空间和相互正交的3个子空间构成。其中14k±1次谐波(含基波)投影在αβ基波子空间,系统14k±3次和14k±5次谐波分别投影在x3-y3和x5-y5子空间,即3次谐波和5次谐波子空间,其中k为大于0的整数[12]。
定义开关函数为

式中,i=a,b,c,d,e,f,g。 则 3 个相互正交的子空间输出的空间电压矢量[4]分别为
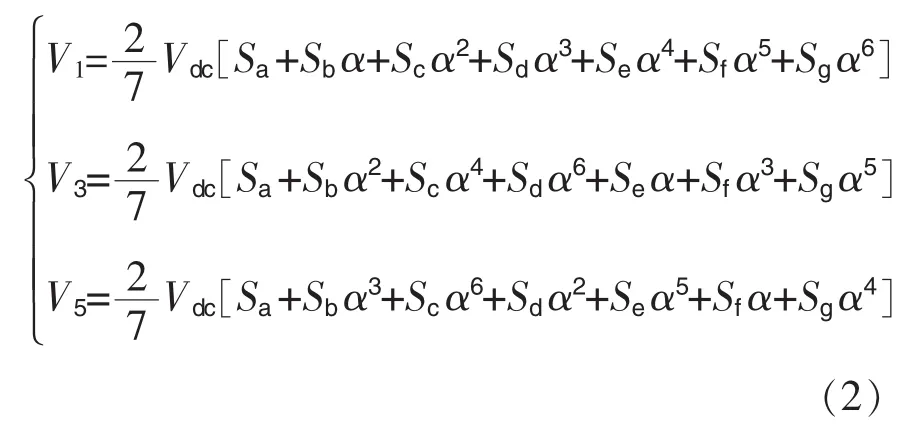
式中,α=ej2π/7。
负载为对称阻感负载时其数学模型为

以负载电流为状态变量,构建状态方程,得

以近似离散化的方法将式(4)进行离散化,得电流预测模型为

式中:Ts为系统的采样时间;k为采样次数。将式(5)应用于3个空间中,即得3个空间负载电流的预测模型,即

式中,iα,β、ixy3、ixy5分别为基波空间、3 次谐波空间、5次谐波空间的电流矩阵。
1.3 目标函数
目标函数是模型预测控制中最重要的组成,对控制器的性能有着决定性的影响。目标函数中应该包含所有待优化的被控量,并通过加强约束,使其最优化。七相逆变器电流控制中最简单的目标函数为误差电流的绝对值形式。除此外,还有误差电流的平方、误差电流的积分、误差电流的变化率等形式[10]。本文选择为误差电流的绝对值的形式,因为其相较后几种方案具有快速的反应速度。
七相电压型逆变器的电流控制中,被控量为3个空间的电流值,则每个空间的目标函数可表示为

最终的目标函数为

式中,k3、k5为2个加权系数,用来表征3次、5次空间电流控制相对于基波空间电流控制的重要性。在实际算法实现过程中,由于采样时间足够小,一般可以取当前时刻的电流指令值作为下一时刻的指令值[9,13],即

也可以采用拉格朗日插值二阶外推法推得下一时刻电流指令值,即

1.4 有限控制集
七相电压型逆变器共有128个电压矢量,其中2个为零矢量,其余均为非零矢量。由式(2)可以得到基波空间矢量分布,如图2 所示,除去 35,75,..,101 和 69,39,..,83 两组矢量, 剩余 7 组非零矢量构成正14边形。设直流母线电压Vdc为1,则构成14 边形的 7 组矢量的幅值比为 Va∶Vb∶Vc∶Vd∶Ve∶Vf∶Vg=0.127∶0.159∶0.229∶0.286∶0.356∶0.515∶0.642。 如 果 将128个电压矢量全部作为备选矢量,微控制器需要在一个采样周期内对所有电压矢量进行计算和寻优,计算量过大,现实中很难实现,必须对128个矢量进行有针对性地选择。 由图(2)可知,a、b、c和 e四组空间矢量幅值小,而且矢量中“0”和“1”不相临,会造成电压矢量方向不一致或定子磁通互相抵消,所以备选矢量一般从d、f、g三组中选取。为提高系统的电压利用率,应首先考虑选取最外圈矢量,即g组。

图2 基波空间矢量分布Fig.2 Phase voltage space vector in αβ plane
2 仿真研究
2.1 初始条件下仿真
在Matlab/Simulink平台上搭建相应的仿真模型,其中直流母线电压Vdc=60 V,七相对称负载电阻R=5 Ω,电感L=6 mH。仿真时,初始给定电流为幅值3 A频率为50 Hz的七相对称交流电流,0.25 s时幅值突变为5 A,采样时间初始值为50 μs,目标函数加权系数k3=k5=1。备选矢量集首先选择f、g组和0号矢量作为初始参考,在第2.3节针对备选矢量的选择进行了专项研究。初始条件下的仿真结果如图3所示。
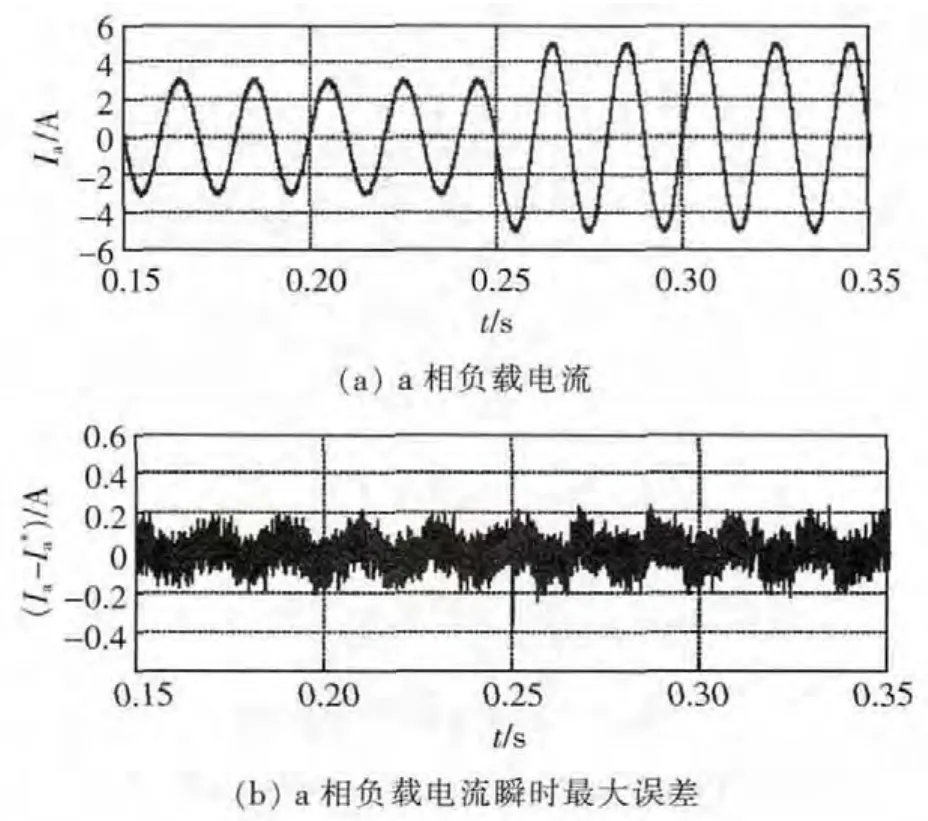

图3 初始条件下的仿真曲线Fig.3 Simulation curves under initial conditions
由图3可看出,无论在稳态时还是在负载突变时,七相负载电流都能够很好地稳定在给定值,脉动值很小。a相负载电流在稳态时平均最大误差值在±0.2 A左右,在负载突变时最大误差值在0.4 A左右,从电流的正弦度来看,THD仅为2.36%,证明FCS-MPC的电流控制具有很好的动静态性能。
因为逆变器桥臂在每一个采样周期内最多只有1次开通或关断动作,所以MPC平均开关频率不超过采样频率的1/2。定义瞬时平均开关频率[13]fs为

式中,fs(i)为每个开关管的瞬时开关频率。由图3可以看出,电流预测的开关频率不固定,在4.2 kHz左右。
2.2 采样时间对控制性能的影响
为分析不同采样频率对控制性能的影响,在保持初始仿真条件下,只改变采样时间进行仿真研究。采样时间分别为 200、100、50、10 μs 的仿真结果如表1所示。
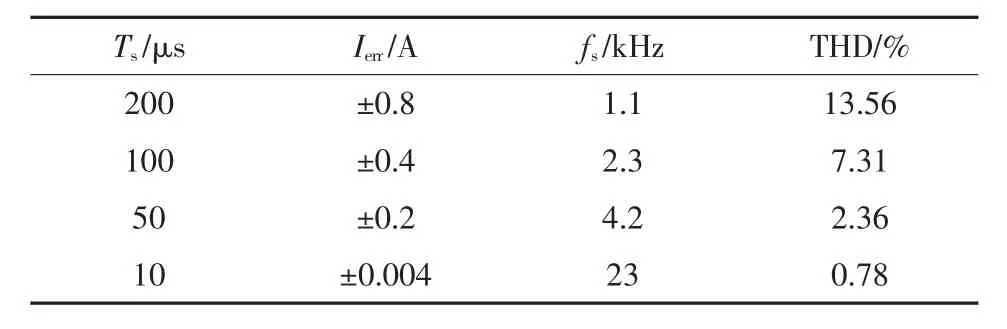
表1 不同采样时间的控制效果比较Tab.1 Performance comparison of different Ts
由表1可知,采样时间对模型预测控制影响显著。采样时间越小,预测间隔越短,电流平均最大误差值Ierr和THD越来越小,电流跟踪指令效果越好;反之,采样时间越长,效果越差。随着采样时间的减小,瞬时平均开关频率fs也增高,基本为采样频率的 0.21~0.23 倍。 当然随着采样时间的减小,对硬件控制器控制器的计算速度要求越高,过小的采样时间,在实际实现过程中困难。
2.3 有限控制集对控制性能的影响
在第1.4节中已提出必须对七相逆变器的128个电压矢量进行针对性选择,在保持初始仿真条下,只改变有限控制集进行仿真。除0号矢量外,备选矢量分别选择半g组矢量、g组矢量、fg组矢量、dg组矢量、df组矢量、dfg组矢量进行了仿真研究,其中,半g组矢量为间隔取g组矢量7个矢量(67,7,14,28,56,112,97)。 部分不同备选矢量集的情况下矢量施加轨迹如图4所示,仿真结果如表2所示。
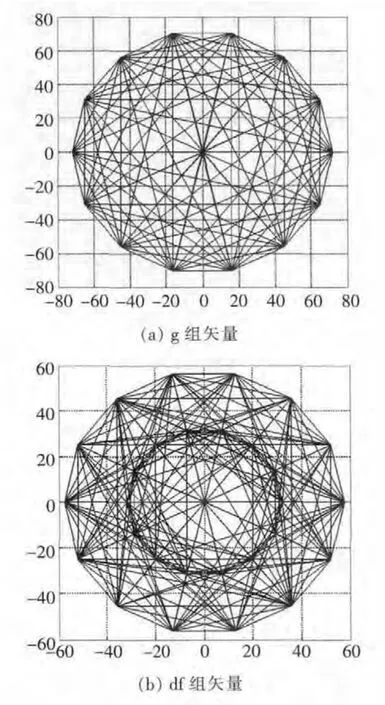
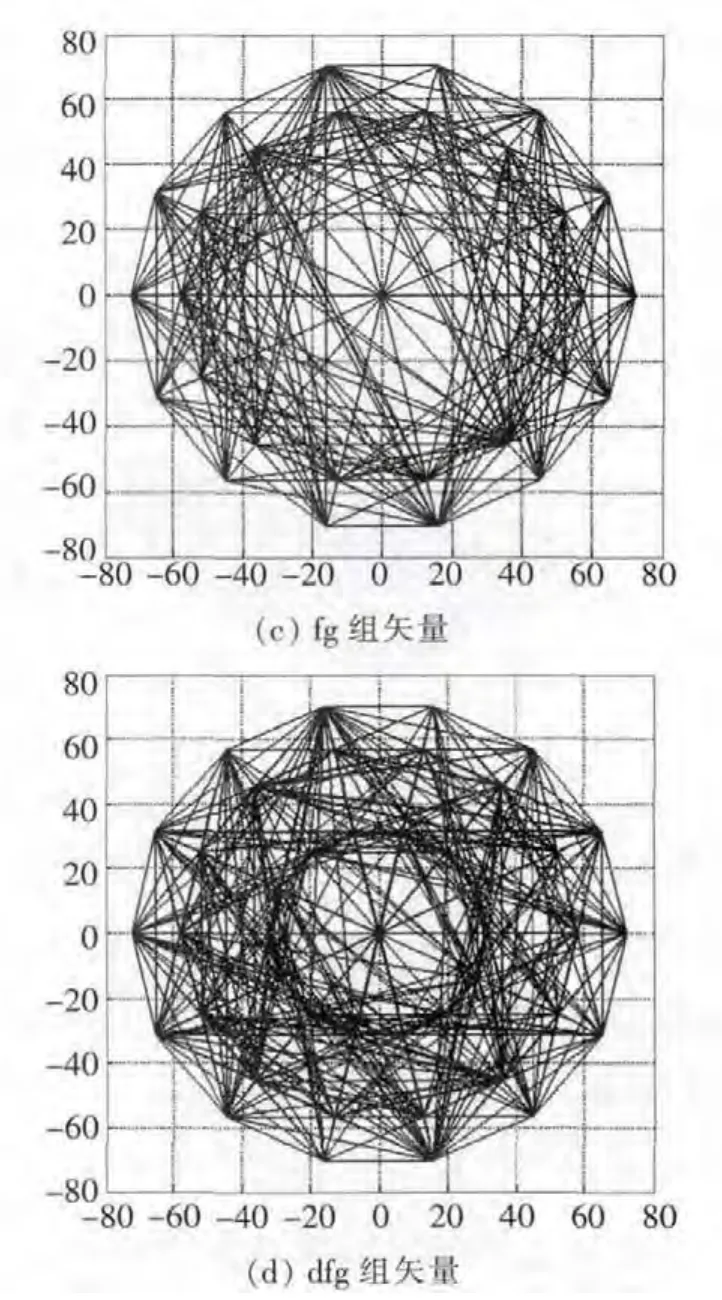
图4 采用不同有限控制集情况下矢量施加轨迹Fig.4 Vector tracks of different finite control sets

表2 不同有限控制集预测电流控制效果Tab.2 Performance comparison betwwen different finite control sets
由图4知,有限控制集模型预测的电流控制的电压矢量施加轨迹并没有简洁的规律,而且并不是所有的备选矢量都会被使用。由表2知,由于d组矢量的幅值过小,电压利用率低,输出功率不能满足控制要求,所以Ierr和THD较大,控制效果差。除d组矢量外,随着备选矢量得数量的增加,Ierr和THD越来越小。在备选矢量数量相同的情况下,Ierr值基本相同,在备选矢量数量超过两组再增加后,Ierr值基本不变,THD差异不大,所以备选矢量选择两组矢量数目适中,电流控制性能良好,而且对硬件的要求不高,容易在现实中实现。
2.4 目标函数对控制性能的影响
目标函数对预测电流的控制性能有着至关重要的作用,为了得到目标函数中加权系数k3、k5最优值,在初始仿真条件不变的情况下,只改变k3、k5的值进行仿真研究,k3、k5分别取 0,0.1,..,0.9,1.0的仿真结果归纳如图5所示。

图5 目标函数加权系数对电流控制的影响Fig.5 THD of different weighting coefficients
由图5可以看出,加权系数k3、k5对预测电流控制的重要影响,当k3、k5任意一个为0时,即对任意空间不控时,负载电流的电流度很差,THD较大,而且k3为0时,比k5为0时控制效果要好。随着加权系数的增加,负载电流电流度越来越好,THD在k3的取值为 0.7~0.8 且 k5的取值为 0.8~0.9 时达到最小区域,而且整个过程中k3、k5近似相等时效果较好。 综上,k3、k5应该取 0.7~0.9 之间的值,而且二者应该近似相等。
3 实验研究
为了验证所提理论的正确性,搭建七相电压型逆变器阻感负载实验平台,控制器选取TI公司TMS320F28335芯片,七相对称负载电阻为5 Ω,电感为6 mH,但由于实验条件的限制,电阻和电感的值略有偏差,并不是严格的对称。备选矢量选用df组矢量,加权系数 k3、k5均等于 0.8,采样时间为 50 μs,直流母线电压为60 V,进行了实验研究,实验波形如图6所示。
由图6(a)和(b)可见,负载电流在稳态时电流脉动很小;从FFT分析可以看出,基波含量为62 dB,3次谐波含量为20 dB,5次谐波含量为14 dB,其他高次谐波含量更小,可见消谐效果良好;由(d)图知,当负载电流突变时,负载电流能够很快的跟踪变化并稳定在新的指令值,证明了该控制方法的良好的动态性能。

图6 实验波形Fig.6 Experiment waveforms
4 结语
本文将有限控制集模型预测控制应用于七相电压源型逆变器的电流控制中,仿真和实验的结果表明,该控制策略能够得到七相负载电流良好的动静态性能,并对3、5次谐波进行了很好的抑制。
进一步分析了目标函数、备选矢量数目,采样时间等因素对控制的性能影响,仿真结果表明,为了得到良好的控制效果,目标函数加权系数K3、K5应取0.7~0.9之间近似相等值;备选矢量除零矢量外,应从d、f、g三组矢量中选取,为提高电压利用率应首先选取最外圈矢量(g组矢量),并在硬件计算速度足够大的情况下,尽可能增加备选矢量数目;采样时间在硬件计算速度提升前提下,应尽可能减小。
[1]Levi E,Bojoi R,Profumo F,et al.Multi-phase induction motor drives:a technology status review[J].IET Electr,Power Application,2007,1(4):489-516.
[2]侯立军.多相感应电机变频调速系统的研究[D].西安:西安交通大学,2004.Hou Lijun.Multi-phase Induction Machine Drive Research[D].Xi’an:School of Electrical Engineering,Xi’an Jiaotong University,2004(in Chinese).
[3]Casadei D,Mengoni M,Serra G,et al.Seven-phase induction motor drive based on stator flux vector control[A].International Symposium on Power Electronics Drives Automation and Motion,SPEED[C].2008:113-119.
[4]Grandi G,Serra G,Tani A.Space vector modulation of a seven phase voltage source inverter[J].In Proc.Int.Symp.Power Electron.Electr.Drives,Autom.Motion,2006:1149-1156.
[5]Domenico C,Drazen D,Levi E,et al.General modulation strategy for seven-phase inverters with independent control of multiple voltage space vectors[J].IEEE Transactions on Industry Electronics,2008,55(5):1921-1932.
[6]郭冀岭,肖建,邱忠才,等.基于DSP28335的七相感应电机矢量控制[J].电源学报,2014,12(1):74-83.Gou Jiling,Xiao Jian,Qiu Zhongcai,et al.Vector control of seven-phase induction motor based on DSP28335[J].Journal of Power Supply,2014,12(1):74-83(in Chinese).
[7]Riehalet J,Rault A,Testud J L,et al.Model predictive heuristic control: Applications to industrial processes[J].Automatica,1978,14(5):413-428.
[8]Cortes P,Rodriguez J,Silva C,et al.Predictive Current control strategy with imposed load current spectrum [J].IEEE Transactions on Power Electronics,2008,23 (2):612-618.
[9]张亚林.异步电机模型预测电流控制技术研究[D].武汉:华中科技大学,2012.Zhang Yalin.Research on Model Predictive Current Control of Inverter Supplied Induction Machine[D].Wuhan:Huazhong University of Science and Technology,2012.
[10]Lim C,Levi E,Jones M,et al.FCS-MPC-based current control of a five-phase induction motor and its comparison with PI-PWM control[J].IEEE Trans.Ind.Electron.,2014,61(1):149-163.
[11]Iqbal A,Abu-Rub H,Cortés P,et al.Finite Control Set Model Predictive Current Control of A Five-phase Voltage Source Inverter[C].In Proc.IEEE IECON,2010:1787-1792.
[12]郭冀岭,肖建,邱忠才,等.基于DSP28335的七相逆变器空间解耦SVPWM方法研究 [J].电工电能新技术,2014(5):11-21.Gou Jiling,Xiao Jian,Qiu Zhongcai,et al.Research on vector space decomposition SVPWM for 7-phase inverter with DSP28335[J].Advanced Technology of Electrical Engineering and Energy,2014(5):11-21(in Chinese).
[13]Zhang Yalin,Lin Hua.Simplified model predictive current control method of voltage-source inverter[J].Power Electronics and ECCE Asia (ICPE and ECCE),2011 IEEE 8th International Conference on,2011:1726-1733.
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化·高一版(2021年11期)2021-09-05
中学生数理化·中考版(2020年12期)2021-01-18
中学生数理化·中考版(2020年10期)2020-11-27
小学科学(学生版)(2019年10期)2019-11-16
电子制作(2018年18期)2018-11-14
通信电源技术(2018年5期)2018-08-23
电力系统及其自动化学报(2016年5期)2016-12-01
现代防御技术(2016年1期)2016-06-01
电气化铁道(2016年6期)2016-05-17
