
城市干道绿波协调控制系统交通评价方法
2015-01-03 05:52卓曦施文荣钱振东
福州大学学报(自然科学版) 2015年3期
卓曦,施文荣,钱振东
(1.福州大学土木工程学院,福建福州 350116;2.东南大学智能运输系统研究中心,江苏南京 210096)
0 引言
城市干道绿波协调控制系统对干道沿线多个交叉口的交通信号进行协调控制,从而通过相位差设置,构建特定带速与带宽的绿波带.目前,针对绿波协调控制系统的研究集中于相位差优化算法.这些算法考虑了理想间距[1]、车队演化规律[2]、绿灯启亮方法[3]、行程车速分布[4]和周期调节过渡[5]等原理,从不同角度优化了相位差.但这些算法常存在假设严格、参数较多等局限,导致其参数取值随机性较大,所得绿波方案出现显著多样化和差异性.因此,干道绿波协调控制系统交通评价有利于绿波算法参数的合理取值,可增强算法适用性.
国外在绿波系统交通评价方面,集中于最大排队长度、出行时间和延误等评价指标[6-7].而国内相关研究则侧重于停车率、行程车速和饱和度等评价指标[8],且常见于仿真评价方法[9].可见国内外研究多为传统意义的信号交叉口交通效率评价,较少从绿波交通角度分析交通效率,且鲜见绿波交通安全评价,尚未提出兼顾效率与安全的绿波系统评价体系.
通过绿波通行规律和交通冲突分析,提出干道绿波协调控制系统的交通效率和安全评价指标体系,进而给出基于评价指标的绿波系统灰色关联评价方法,最后针对经典数解法的初定带速和理想间距范围等参数取值差异性,进行实例绿波方案计算及评价.实例分析结果表明,该方法可优选绿波协调控制系统,提高绿波算法参数取值的合理性.
1 城市干道绿波协调控制系统评价指标体系
城市干道绿波协调控制系统为双向绿波系统,存在对向通行的两条绿波带.基于绿波交通通行规律和交通冲突分布状况,提出6个绿波交通效率评价指标和2个绿波交通安全评价指标.
1.1 交通效率评价指标
1)绿波不均匀度E1.干道绿波协调控制系统由多组相邻信号交叉口构成.在每组信号交叉口中,由于上游交叉口次路右转车流和非协调相位左转车流的合流行为,下游交叉口进口车道排队长度易出现随机性变化规律,导致交通流率波动性.而交通流率波动性是绿波系统相位差实施效果的重要影响因素,所以针对协调相位中相邻交叉口的交通流率波动性,定义绿波不均匀度E1为相邻信号交叉口到达流量比例平均值,作为绿波系统的交通效率评价指标.
双向绿波系统中某方向绿波带的绿波不均匀度为

式中:m为绿波系统的信号交叉口数量;j为第j个信号交叉口;Ej,1为相邻信号交叉口j与j+1的绿波不均匀度,即j对j+1的绿波交通影响程度;qj,max为信号交叉口j的协调相位最大车道车流到达率(pcu·h-1);qj+1为信号交叉口j+1的协调相位车流到达率(pcu·h-1).
双向绿波系统的E1取两个方向绿波带的绿波不均匀度较大值.可见通过交通流率波动性分析,绿波不均匀度E1反映了相邻信号交叉口协调相位的衔接程度,从而体现出绿波通行效率.
2)绿波通行比例E2.系统周期利用程度越高,则绿波系统交通效率越高,时间损失越小.作为绿波带连续通行时间长度,绿波带宽是系统周期的重要组成,影响着绿波通行能力.因此,为评价绿波系统周期的利用程度,定义绿波通行比例E2为绿波带宽占系统周期的比例,有

式中:Wab为双向绿波带带宽平均值(s);Cs为绿波系统周期(s).E2反映了系统周期的利用程度.E2越大,绿波系统通行能力越大,车流通行延误越小.
3)绿波可达性E3.绿波协调控制系统中,瓶颈信号交叉口是协调相位绿灯时长最小的交叉口.瓶颈交叉口绿灯时长的利用程度决定了绿波带宽,进而影响绿波可达性.因此,为评价绿波系统中瓶颈交叉口的绿灯利用程度,定义绿波可达性E3为绿波带宽占瓶颈交叉口绿灯时长的比例,有

式中:Wfb为某方向绿波带带宽(s);Wrb为对向绿波带带宽(s);gf为某方向绿波带瓶颈信号交叉口绿灯时长(s);gr为对向绿波带瓶颈信号交叉口绿灯时长(s).绿波可达性E3表示了绿波系统瓶颈交叉口协调相位的通行能力.
4)绿波车队通行率E4.车流以聚集的车队形式通过绿波带,从而构成的脉冲式交通可提高绿波带的利用率.通过交通量与信号配时的关系分析,定量表达车流聚集性,以体现绿波系统车队的通过状态.因此定义第j个信号交叉口车队通行率Ej,4为该交叉口协调相位绿灯时段到达车流比例pj,x与绿信比λj,x的比值,用于分析绿灯和红灯时段平均到达流量的关系,以评价绿波系统的车流聚集特性.有

式中:pj,x为第j个信号交叉口协调相位绿灯时段到达交通量qj,g(pcu)与周期到达量qj,c(pcu)的比值,算法如下:
①统计红灯时段进入排队队列的车辆数,即第j个信号交叉口红灯时段到达交通量qj,r(pcu),并记录红灯结束时刻排队队列末尾车辆;
②统计绿灯时段车流驶离量,即绿灯启亮至黄灯结束的时段内越过停车线的车辆数;
③绿灯时段内排队队列末尾车辆驶离,表明红灯排队队列于绿灯时段清空.此时第j个信号交叉口绿灯时段驶离交通量为qj,c;
④绿灯时段内排队队列末尾车辆未驶离,表明红灯排队队列并未于绿灯时段清空.此时绿灯时段驶离交通量与剩余排队车辆数的和为qj,c;
⑤根据定义

结合式(4)与(5),双向绿波系统中某方向绿波带的绿波车队通行率E4为

双向绿波系统的E4取两个方向绿波带的绿波车队通行率较小值.当E4=1时,绿波交通为均匀交通流,此时车流聚集性较差;当E4<1时,表明流量与配时不成比例,绿灯时段平均到达流量小于红灯时段平均到达流量,此时车流聚集性很差;当E4>1时,绿灯时段平均到达流量大于红灯时段平均到达流量,此时车流聚集性较好.
5)绿波出行时间E5(s).绿波出行时间是车辆通过绿波带各信号交叉口所花费的出行时间总和.因此,绿波出行时间E5是最直接反映绿波交通效率的评价指标.双向绿波系统中某方向绿波带的绿波出行时间为

式中:tj为信号交叉口j至j+1的平均通行时间(s).
分别计算两个方向绿波带的绿波出行时间,取较大值为双向绿波系统的E5.
6)绿波单车平均延误E6(s/pcu).绿波系统的车流延误直接体现了该系统的出行时间损失,是交通效率的表现形式.因此以绿波单车平均延误E6为交通效率评价指标.
根据HCM2010[10],绿波系统中第j个信号交叉口第i条车道的单车平均延误dj,i(s/pcu)为

式中:dj,i,1为第j个信号交叉口第i车道的单车均匀延误(s/pcu);PFj,i为第j个信号交叉口第i车道的前进校正系数(progression adjustment factor);dj,i,2为第j个信号交叉口第i车道的单车随机附加延误(s/pcu);dj,i,3为第j个信号交叉口第i车道的单车初始排队附加延误(s/pcu).
dj,i,1、dj,i,2和 dj,i,3均采用文献[10]的公式进行计算.为计算 PFj,i,如图1 所示,根据延误三角形的原理,假定绿灯时段车辆到达率大于红灯时段,计算第j个信号交叉口第i车道协调相位均匀延误di(s)为

式中:ri,e为第i车道对应协调相位有效红灯时长(s);qi,r为第i车道红灯时段车流到达率(pcu·h-1);Si为第i车道饱和流量(pcu·h-1);qi,g为第i车道绿灯时段车流到达率(pcu·h-1);qi为第i车道车流到达率(pcu·h-1).
而第i车道协调相位的Webster均匀延误du(s)为

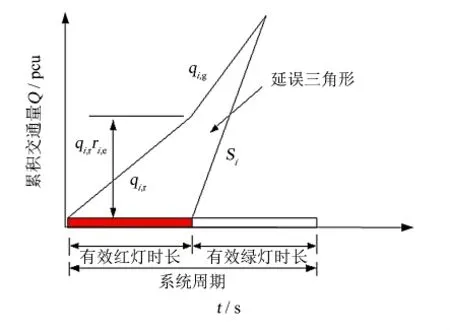
图1 绿波系统协调相位均匀延误三角形Fig.1 Coordinated phase uniform delay triangle in the green wave system
式中:yi为第i车道的流量比.
PFj,i表示绿波系统设置后,由于绿灯时段车流到达比例增大,信号交叉口均匀延误产生的差异.因此结合式(9)和(10),有下式:

式中:fPA为绿灯时段车队到达的辅助校正系数,根据文献[10]取值.
结合式(8)和(11),双向绿波系统中某方向绿波带的绿波单车平均延误E6为

式中:Ij为第 j个信号交叉口非协调相位对应的进口车道数;Qi为第 i车道的高峰15 min流率(pcu/15 min);Uj为第j个信号交叉口协调相位对应的进口车道数.
分别计算两个方向绿波带的绿波单车平均延误,取较大值为双向绿波系统的E6.
1.2 交通安全评价指标
绿波系统常见如下现象:①绿波带开始或结束时刻,驾驶员对绿波通行规律的心理反应存在差异,导致车辆采用不同的起动加速度;②绿波通行中,车辆进行车道变换,导致目标车道后车采取制动行为;③信号交叉口相位数量较少,有助于提高绿波系统中干道和次路的交通效率,且可保证足够的绿波带宽.因而为减少相位数,绿波系统多采用红灯右转策略,易导致直右合流车辆发生碰撞事故.第①、②种现象引发了车辆同向追尾冲突,而第③种现象导致了直右合流冲突.因此提出绿波协调控制系统的交通安全评价指标为:
1)同向追尾冲突指标E7(km·h-1).干道车流同向追尾冲突需考虑跟驰车辆的车头间距、相对车速和相对加速度等参数.根据线性跟驰模型,假设跟驰车辆的空间距离关系为:

式中:Sq为冲突起始时刻跟驰车辆的车头间距(m);vq为冲突起始时刻前车的车速(km·h-1);T为跟驰时间(s);aq为前车减速度(m·s-2);vh为冲突起始时刻后车的车速(km·h-1);tpr为反应时间(s),假设tpr=2.50 s;ah为后车减速度(m·s-2);l0为车辆安全间距(m),假设l0=3 m.
根据式(13),同向跟驰车辆速度差Δvhq(km·h-1)为

其中:若同向追尾冲突发生于绿波带开始或结束时刻,ah需考虑驾驶员对绿波系统的判别、反应能力;若同向追尾冲突发生于车道变换过程,ah需考虑目标车道后车对车道变换行为的制动避让方式.
统计绿波系统中同向追尾冲突的Δvhq平均值为追尾冲突指标E7,即

式中:M为绿波系统同向追尾冲突的数量;Δvj,hq为第j个同向追尾冲突中跟驰车辆速度差(km·h-1).
2)直右合流冲突指标E8(km·h-1).如图2所示,在红灯右转策略影响下,绿波系统常见干道直行车与次路右转车的合流冲突现象.将直右合流冲突假设成干道直行方向上车流的跟驰现象,根据式(15)有

图2 交叉口直右合流冲突Fig.2 Through - right flow converging conflict at the intersection
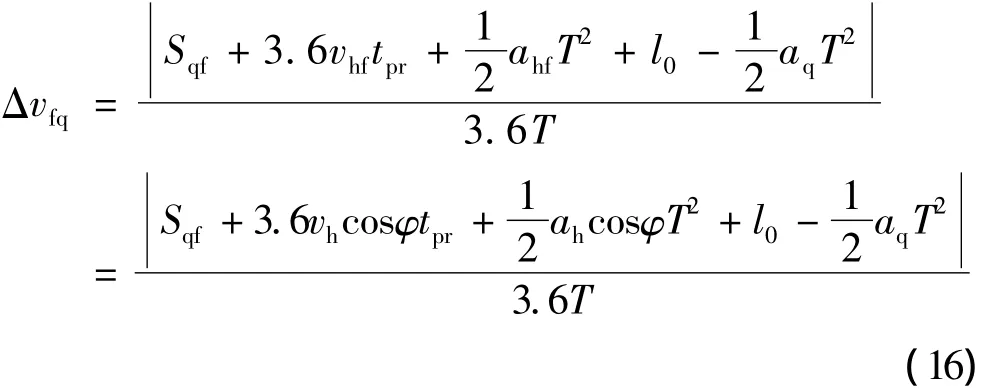
式中:Δvfq为直右合流冲突中右转车直行方向速度分量与直行车的速度差(km·h-1);Sqf为冲突起始时刻直右车辆的直行方向车头间距(m);vhf为冲突起始时刻右转车的直行方向车速分量(km·h-1);ahf为右转车的直行方向减速度分量(m·s-2);φ为右转车行车方向与直行方向的夹角(°),假设φ=45°.
统计绿波系统中直右合流冲突的Δvfq平均值为直右合流冲突指标E8,即

式中:N为绿波系统直右合流冲突的数量;Δvj,fq为第j个直右合流冲突中右转车直行方向速度分量与直行车的速度差(km·h-1).
综上所述,利用式(1)、(2)、(3)、(6)、(7)、(12)~(17)计算这8个绿波系统评价指标.分析评价指标公式中变量的物理意义,可见公式参数涉及减速度、周期时间、延误、绿灯时长、交通量、车头间距、车速、带宽、流量比等诸多变量.这些变量两两之间鲜见明确的函数关系且不相关,故评价指标公式参数两两之间存在一定独立性.
2 城市干道绿波协调控制系统灰色关联评价
城市干道绿波协调控制系统的8个评价指标相互关系模糊,因而采用灰色关联评价法[11]对评价指标进行关联度分析,以选出最优绿波协调控制方案.
1)评价指标矩阵一致化与规范化.E1、E2、E3和E4为定量正指标,而E5、E6、E7和E8为定量负指标.针对n个干道绿波协调控制方案,第i(1≤i≤n)方案的第j(1≤j≤8)评价指标值为ei,j,从而得出n个绿波方案的评价指标矩阵E=(ei,j)n×8.进而对评价指标矩阵进行一致化与规范化,给出规范化矩阵E″=(e″i,j)n×8.
其中:

式中:e″i,j为第 i方案的第 j评价指标规范化值,1≤i≤n,1≤j≤8;e'i,j为第i方案的第j评价指标一致化值,1≤i≤n,1≤j≤8.
2)关联系数矩阵计算.构建参考序列Eo={e″j},1≤j≤8,其中

Eo对应了理想的绿波方案.


式中:ζi,j为第i方案第j评价指标与对应最优指标的关联系数;ρ为分辨系数,ρ∈[0,1],通常ρ=0.5.3)灰色关联度计算.利用层次分析法计算第j个评价指标的权重wj,得权重向量W=(w1,w2,…,w8).第i个绿波方案与理想方案的灰色关联度ri为

由ri数值对n个绿波协调控制方案进行优劣排序.最大的ri对应的第i个绿波协调控制方案最靠近理想方案,即此方案为最优.
3 实例分析
3.1 模型变量取值
如图3所示,以某市干道沿线4个交叉口为例.绿波系统周期选取各交叉口周期的最大值,即Cs=90 s.通过不同初定带速vo(m·s-1)和理想间距范围设置,利用经典数解法进行3次绿波方案计算:第1次计算 vo=10.2 m·s-1,理想间距范围为{voCs/2 -50,voCs/2+50};第2 次计算 vo=11.7 m·s-1,理想间距范围为{voCs/2-100,voCs/2+100};第3次计算 vo=12.9 m·s-1,理想间距范围为{voCs/2-80,voCs/2+80}.应用数解法计算后,提出3个不同的绿波协调控制方案.

图3 实例交叉口间距Fig.3 Example intersection spacing
对第1绿波方案的评价指标模型变量进行取值,其余方案以此类推.根据式(1)、(2)、(3)、(6)、(7)、(12)~(17),第1方案的评价指标模型变量分为信号交叉口、进口车道的交通空间变量和交通冲突变量.为生成变量数值,应用VISSIM仿真软件构建第1方案的仿真体系:① 仿真时间为晚高峰时段17∶30-18∶30;②利用路段(links)和连接器(connectors)等路网模块,根据4个交叉口的间距和渠化措施,建立虚拟路网结构;③利用车辆输入(vehicle inputs)模块,根据高峰小时实地调查的交通量数据,输入仿真交通量数值;④利用路径决策(routes)模块,根据实地调查的交叉口交通量转向比例,输入仿真交叉口的车流路径分布;⑤利用信号控制机(signal controllers)模块的信号灯组(signal groups)和信号灯头(signal heads)功能,依据第1绿波方案中各交叉口的配时方案,设置仿真信号配时表.
在仿真体系中,第1方案的模型变量具体取值如下:
1)第1绿波方案信号交叉口变量取值.利用VISSIM中数据采集(data collection)和行程时间(travel times)等评价模块,结合调查分析,生成如下信号交叉口变量与参数数值:m=4,Wfb=Wrb=Wab=46 s,gf=gr=58 s,fPA=0.31;在黄山路-九龙江路交叉口至黄山路-金山路交叉口方向的绿波带中,第j个信号交叉口变量 qj,max、qj+1、qj,c、qj,r、λj,x、tj如表 1 所示,另一个方向的绿波带类似取值.

表1 第1绿波方案的信号交叉口变量取值Tab.1 Variable estimation of signalized intersections for the first green wave scheme
2)第1绿波方案进口车道变量取值.以第1方案的第2信号交叉口(黄山路-长江路)西进口道为例,其余进口车道进行类似取值.
第2信号交叉口西进口道包含1条左转专用车道和2条直行车道,其中直行车道为协调相位对应车道,因此按由内向外的顺序对进口车道进行编号,U2=2,I2=1.进而如表2所示,利用VISSIM中路段评价(link evaluation)、数据采集(data collection)和车辆信息统计(vehicle record)等评价模块,生成该交叉口西进口车道变量 dj,i,1、dj,i,2、dj,i,3、qi、Si、qi,g、qi,r、yi、Qi,其它信号交叉口进口车道变量类似取值.

表2 第2信号交叉口西进口车道变量取值Tab.2 Variable estimation of second signalized intersection western approach lanes (j=2)
3)第1绿波方案交通冲突变量取值.仿真观测这4个交叉口的同向追尾冲突和直右合流冲突,得出高峰时段同向追尾冲突数量M=1 263,直右合流冲突数量N=468.于仿真数据中,统计Sq、T、aq、vh、ah等交通冲突变量数值.
3.2 实例灰色关联评价
根据式(1)、(2)、(3)、(6)、(7)、(12)~(17),计算3个绿波协调控制方案的8个评价指标,有评价指标矩阵E:

根据式(18),对评价指标进行一致化和规范化后得规范化矩阵为

则参考序列 Eo={1.00 1.00 1.00 1.00 0.00 0.00 0.00 0.00},求出绝对差值矩阵为

进而根据式(19),求出关联系数矩阵ζ为

利用层次分析法计算评价指标的权重向量W为

最后根据式(20),计算各个绿波协调控制方案的灰色关联度为r1=0.606,r2=0.733,r3=0.443,可见r2对应的绿波方案最优.第2方案的经典数解法初定带速与理想间距范围较合理,故灰色关联度最高;第1方案选用的理想间距范围较小,故灰色关联度略低于第2方案;第3方案选用的初定带速数值过大,且理想间距范围不足,故灰色关联度最低.该实例干道的最优绿波协调控制方案如表3所示.

表3 最优绿波协调控制方案Tab.3 Optimal green wave coordination control plan
4 结语
在城市干道绿波协调控制系统方面,国内外研究尚未形成一套系统性、兼顾安全与效率的评价方法,且绿波交通行为研究尚不多见,导致绿波系统优劣性缺乏较完善的评判标准.
为综合评价绿波协调控制系统的交通效率与安全水平,通过绿波系统通行效率影响要素和交通冲突分布规律研究,提出了绿波不均匀度、绿波通行比例、绿波可达性、绿波车队通行率、绿波出行时间和绿波单车平均延误等交通效率评价指标,以及同向追尾冲突和直右合流冲突等交通安全评价指标.进而依据此评价指标体系,给出了绿波系统的灰色关联评价方法.最后对某干道沿线4个交叉口进行实例分析.实例评价结果表明:合理选择经典数解法的初定带速和理想间距范围等参数数值,可获取兼顾效率和安全的最优绿波协调控制系统.可见该评价方法有助于优选干道绿波协调控制方案,可提高绿波系统的交通效率和安全水平.
绿波系统评价方法选用了同向和合流冲突等安全评价指标,尚不能全面涵盖绿波系统交通安全影响要素,且仅以经典数解法的参数取值为实例,对不同类型绿波算法进行评价的可行性尚未得到论证,需做进一步探讨.
[1]王殿海,杨希锐,宋现敏.交通信号干线协调控制经典数值计算法的改进[J].吉林大学学报:工学版,2011,41(1):29-34.
[2]Liu Yue,Chang Ganglen.An arterial signal optimization model for intersections experiencing queue spillback and lane blockage[J].Transportation Research Part C,2011,19(1):130-144.
[3]Hu Heng,Liu Henry X.Arterial offset optimization using archived high - resolution traffic signal data[J].Transportation Research Part C,2013,21(12):131-144.
[4]吕斌,牛惠民.城市交通线控系统相位差优化方法[J].交通运输工程学报,2011,11(4):103-107.
[5]卢凯,徐建闽,郑淑鉴,等.交通信号协调控制方案过渡优化算法[J].交通运输工程学报,2012,12(6):97-103.
[6]Shoup G E,Bullock D.Performance evaluation of coordinated-actuated traffic signal systems[C]//Institute of Transportation Engineers.Proceedings of the Transportation Frontiers for the Next Millennium:69th Annual Meeting of the Institute of Transportation Engineer.Las Vegas:Institute of Transportation Engineers,1999:1 -20.
[7]Mahmood M N,Othman C P,Arash M R.Evaluation of effect of traffic signal coordination system on congestion[C]//WSEAS.Proceedings of the 2nd WSEASInternational Conference on Urban Planning and Transportation.Rodos Island:University Politehnica of Bucharest,2009:143 -148.
[8]马畅,敖谷昌,邵毅明.信号协调控制下城市干道运行效率评价研究[J].交通信息与安全,2012,30(4):62-65.
[9]郭彦东,李欢,李夏苗.城市主干路信号配时优化实证研究[J].交通运输系统工程与信息,2011,11(s1):167-174.
[10]Transportation Research Board Executive Committee.Highway capacity manual 2010[R].Washington DC:TRB,2010.
[11]王先甲,张熠.基于AHP和DEA的非均一化灰色关联方法[J].系统工程理论与实践,2011,31(7):1 222-1 229.
猜你喜欢
工会博览(2022年33期)2023-01-12
作文周刊·小学一年级版(2020年40期)2020-10-19
东坡赤壁诗词(2019年5期)2019-11-14
扬子江(2019年3期)2019-05-24
娃娃乐园·3-7岁综合智能(2016年4期)2016-10-24
浙江大学学报(工学版)(2016年9期)2016-06-05
数学教学通讯·初中版(2015年5期)2015-06-17
吉林大学学报(工学版)(2013年1期)2013-08-16
中国火炬(2010年5期)2010-07-25
中学生百科·小文艺(2009年8期)2009-11-24
