气动六足壁面爬行机器人控制系统的开发
2014-12-31 08:23杨慧斌马春港吴竹霞齐亚梦
中国科技信息 2014年22期
杨慧斌 马春港 汪 满 吴竹霞 齐亚梦
上海工程技术大学机械工程学院
气动六足壁面爬行机器人是一个采用真空吸附和PLC(可编程控制器)控制技术的系统。文章详细阐述了机器人的机械组成、气动和控制系统以及运动顺序等。机器人控制系统选用了西门子S7-200 系列PLC 作为核心,采用PLC 顺序控制完成了对机器人运动控制的编程,最终实现了机器人在壁面上稳定地进行直行以及转向运动。
概述
进入21 世纪以来,机器人在各行各业中都得到了广泛的应用和发展,其研究与应用水平已成为一个国家经济实力和科技发展水平的重要标志。随着气动技术的发展,气动机器人的应用领域也逐渐广泛,在一些特殊的应用场合,如安全、建筑、国防等,要求工作可靠、体积小、动作灵活的气动爬行机器人,尤其是在壁面爬行机器人的研究。壁面爬行机器人是特种机器人的一种,是在恶劣、危险、极限等情况下进行特定作业的一种自动化机械装置,如今越来越受到人们的重视。为使其尽快完善,对壁面爬行机器人的研究已成为机器人技术发展的热点之一。目前壁面爬行机器人已在核工业、石化工业、建筑工业、消防部门、造船业一。目前壁面爬行机器人已在核工业、石化工业、建筑工业、消防部门、造船业等领域得到了应用。
机器人的机械结构
机器人的机械结构是机器人实现稳定运动的基础,只有稳定的机械结构作为前提,才有可能实现机器人的爬壁运动。本文所述气动六足壁面爬行机器人结构主要由主连接板、脚连接板、气缸、用于支撑控制系统的上托板、护脚板、真空吸盘及连接部件构成。主连接板用于连接机器人的三个脚连接板;脚连接板用于一对足的连接,实现相连两足的联动;上托板用于承载气动元件,如:电磁阀、真空阀等;护脚板用于保护机器人的足不受外界因素的影响;气缸用于将压缩空气的压力能转换为机械能,驱动机器人运动;真空吸盘使机器人能稳定地吸附在壁面上。连接部件用于连接机器人的各个机械部分,保证机器人的机械结构的稳定性。(图1:机械结构图)
控制系统的开发
PLC 选型

图1 机械结构图
可编程控制器是一种数字运算操作的电子系统,专门在工业环境下应用而设计。它采用可以编制程序的存储器,用来在执行存储逻辑运算和顺序控制、定时、计数和算术运算等操作的指令,并通过数字或模拟的输入(I)和输出(O)接口,控制各种类型的机械设备或生产过程。气动六足机器人选用了西门子S7-200 系列PLC 作为控制系统的核心。S7-200 PLC是紧凑型可编程控制器,它结构紧凑、功能强,具有很高的性价比,在中小规模控制系统中广泛应用,能够满足各种设备的自动化控制要求,而且其具有功能强大的指令集及通信指令功能,S7-200 PLC 不同于S7-300 或S7-400 系列PLC 是小型可编程控制器,由于其体积小等特点,故更适合作为小型机器人的控制核心。
I/0 点分配
熟悉机器人的运动流程,确定输入/输出点的个数,由此分配PLC 的I/O 点。
机器人的运动
爬壁机器人的运动是通过PLC 可编程控制器对机器人的爬行进行编程,顺序控制一组电磁阀来实现机器人的运动(相应编号可参考图2:机器人三维简图)。初始状态为6 个吸盘全部吸合在壁面。

表1 I/O 分配表(气缸和吸盘分布详情见图2)
直线行走运动实现的具体步骤如下:1 首先通过控制电磁阀将机器人的Z9、Z10 真空破坏,Z3、Z4 气缸升起,即爬壁机器人的直行状态;2Z7、Z12 真空破坏,Z1、Z6气缸升起,Z14 直行气缸伸出,Z1、Z6 气缸下降,Z7、Z12 吸盘吸合,实现Z1、Z6 气缸相应的机器人足向前移动;3Z8、Z11 真空破坏,Z2、Z5 气缸升起,Z14 直行气缸缩回,Z2、Z5 气缸下降,Z8、Z11 吸盘吸合,实现Z2、Z5 气缸相应的机器人足向前移动;4 重复以上步骤即可实现机器人直线运动。
直行运动过程中转向运动实现的具体步骤如下:1 首先通过控制电磁阀将机器人的Z3、Z4 气缸下降,Z9、Z10 吸盘吸合,Z7、Z8、Z11、Z12 真空破坏,Z1、Z2、Z5、Z6 气缸升起;2Z13 转向气缸伸出(收缩),主连接板相对于Z3、Z4 气缸相对应的脚连接板逆时针(顺时针)转动一定角度,即实现左转(右转);
3Z1、Z2、Z5、Z6 气缸下降,Z7、Z8、Z11、Z12 吸盘吸合,机器人回到6 个吸盘全部吸合在壁面上的初始状态。
机器人的编程与调试
顺序功能图(Sequeential Function Chart)是一种新颖、按工艺流程图进行编程的图形化编程语言,也是一种符合国际电工委员会(IEC)标准,被首选推荐用于可编程控制器的通用编程语言,在PLC 应用领域中应用广泛及推广。采用顺序功能图进行PLC 梯形图应用编程具有以下优点:1、在程序中能直观地看到设备的动作顺序。顺序功能图程序是按照设备(或工艺)的动作顺序而编写,所以程序的规律性较强,容易读懂,具有一定的可视性。2、在设备发生故障时能很容易的找出故障所在位置。3、不需要复杂的互锁电路,更容易设计和维护系统。故本文选用了顺序控制对机器人进行编程。机器人运动的顺序功能图如图3:

图2 机器人三维简图
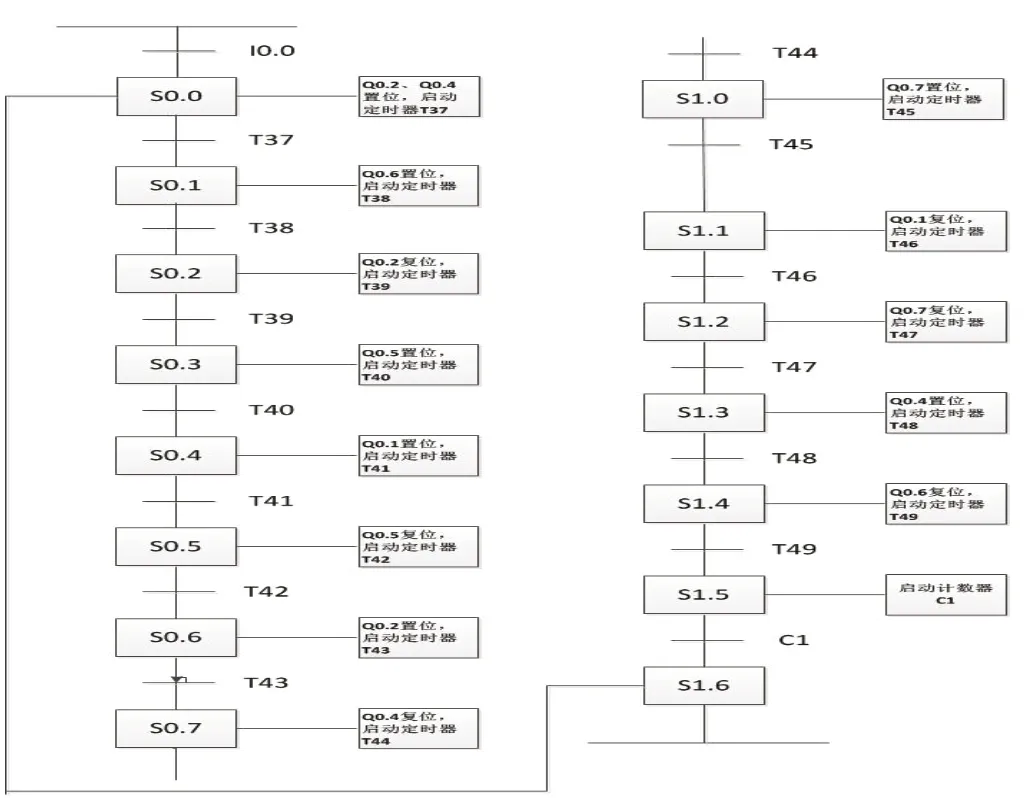
图3 顺序功能图
依据顺序功能图编写梯形图程序,部分程序语句表如下:
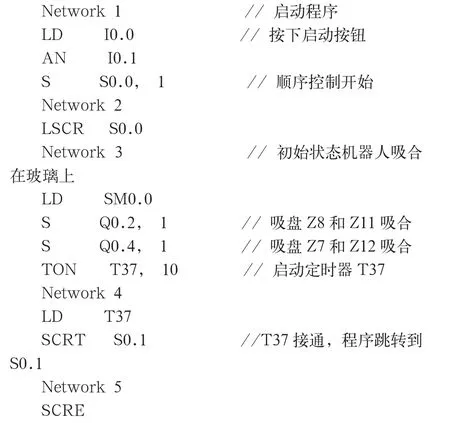
经过对程序的逐步调试,证实所编写程序能实现机器人的直行及转向运动。机器人的整体调试结果:机器人能够稳定的在壁面上进行直行以及转向运动,达到了设计要求,甚至机器人的稳定性比预想中的更好。
结束语
随着社会的进步和科学的发展,机器人产品在人们的工作环境中发挥着越来越重要的作用,机器人也就成为目前国内外研究的热点课题,六足爬行机器人作为机器人的一个分支,其运动具有较强的稳定性,故而在军事运输、天文探测等领域就具有重要的意义,因此在国内外六足机器人均得到了广泛研究。
猜你喜欢
天然气与石油(2022年4期)2022-09-21
北京航空航天大学学报(2022年7期)2022-08-06
北京航空航天大学学报(2021年6期)2021-07-20
汽车维护与修理(2019年1期)2019-07-09
模具制造(2019年4期)2019-06-24
北京航空航天大学学报(2017年5期)2017-11-23
无人机(2017年10期)2017-07-06
北京航空航天大学学报(2016年6期)2016-11-16
浙江大学学报(工学版)(2016年11期)2016-06-05
科技创新导报(2016年9期)2016-05-14