
多功能相控阵雷达目标监视与气象探测兼容模式设计
2014-12-31 11:56尤祖光杨文华
上海航天 2014年5期
叶 舟,尤祖光,姜 伟,杨文华
(上海航天电子技术研究所,上海 201109)
0 引言
随着我国低空空域管理改革的深入,低空监视雷达对低空飞行器的监控和管理将发挥重要作用。但高度3 000m以下低空小尺度恶劣气象灾害时有发生,对低空飞行器的安全造成严重威胁,亟需气象探测装备投入使用。目前国内布站的气象雷达多采用速调管发射机,发射功率大,作用距离远,站点分布稀疏,且为防电磁辐射伤害通常抬高低仰角波束,无法实现对低空空域的全覆盖。若设计专用低空补盲气象雷达将显著增大设备投入及其寿命周期成本,且会增加辐射干扰。因此,一种折中的方案是采用集成化设计,在低空监视雷达上集成气象探测功能。在同一部雷达上兼容目标监视和气象探测功能产生了设计难点,主要问题有:两种功能要求的扫描数据率不匹配,雷达波形有差异,时间、波束资源调度策略不统一。这些问题可通过雷达兼容工作模式的优化设计予以解决。
随着军用有源相控阵雷达技术的逐渐成熟,集成目标监视和气象探测两种功能为一体的新一代相控阵雷达已成为空管雷达发展的重要趋势。目前的研究一般基于两维相位扫描的相控阵雷达平台,因波束可在方位和俯仰自由调度,工作模式设计灵活,易于实现目标监视和气象探测兼容。美国正在实施多任务相控阵雷达(MPAR)计划,拟采用相同型号的MPAR雷达(三面两维相扫阵列)统一行使空中交通管理、气象探测和空域安全保障等多项职能[1]。针对民用领域应用,一维相扫相控阵雷达具低成本优势,在该平台上集成气象探测功能更具实用价值。但方位旋转相控阵雷达仅在俯仰相位扫描,波束调度自由度降低,兼容工作模式设计难度显著增加,相关研究尚未见报道。美国海军研究生院MWR-05XP项目研究了方位旋转相控阵雷达用于气象探测,设计了气象模式下的波束扫描策略,但未考虑目标监视和气象探测模式的兼容[2]。为此,本文对多功能相控阵雷达目标监视与气象探测兼容模式设计进行了研究。
1 兼容模式时间资源
气象目标的基本组成单元为大气介质、雨滴、雪花、冰晶等空气中的微粒,尺寸为微米至毫米量级,因此S、C、X波段测雨雷达一般工作在瑞利区。单个距离门气象回波由脉冲空间(如图1所示)内包含的气象微粒瑞利散射矢量叠加而成,因微粒数量众多,且相对位置随时间变化,故雷达回波具明显的随机特性[3-4]。
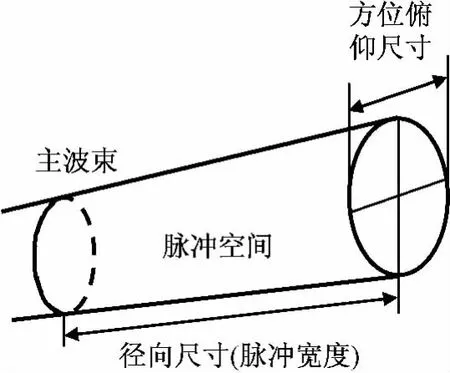
图1 脉冲空间Fig.1 Pulse volume schematic diagram
气象雷达的三种基本产品是反射率因子、平均径向速度和谱宽,其他三十余种导出产品(如累计雨量、风暴单体识别和跟踪、中气旋等)均由基本产品反演而得。其中:反射率因子反映降雨强弱,与回波平均功率成正比。气象速度测量原理与目标监视雷达多普勒测速类似,但因各微粒运动的随机性,气象目标速度存在一定的谱宽,故用平均径向速度和谱宽两个参数描述[5]。
统计规律表明:多个随机气象散射体合成回波的幅值近似服从瑞利分布。若对某距离门气象回波进行N次相互独立取样,回波样本功率取平均后可用于估计平均回波功率。当N>10时,平均功率分布曲线近似于高斯分布[3]。反射率因子估计的标准差

式中:为反射率因子估值。可见,波束驻留时间越长,N值越大,反射率因子估计误差越小。一般取N≥30,此时估计出的回波功率误差为-1~1dB的概率大于80%。
值得注意的是,用于反射率因子估计的有效独立样本数N不等于采样脉冲数,而是与脉冲重复周期T、多普勒速度谱宽σv和雷达波长λ均有关的量。设采样脉冲数为K1,则有

式中:α为独立指数,且
当一个距离单元获得的有效独立样本数不够时,还可对连续多个距离单元进行平均,以增加有效独立样本数。设选用的距离门个数为K2,最终可得有效独立样本数

采用距离平均方法时,距离门个数受距离分辨力的限制[3]。
利用多普勒相移,用脉冲对法或FFT法可估计平均径向速度和速度谱宽,估计方差分别为
式中:M为相干样本的个数;T为样本的采样间隔时间(脉冲重复间隔)[1]。可见,波束驻留时间越长,平均径向速度和谱宽估计误差越小。平均径向速度和谱宽估计要求相邻回波有一定的相关性,采样时间间隔应满足

另一方面,空管雷达目标监视全空域数据率应控制在0.1~0.25Hz内,才能满足民航飞行间隔控制所需的误差要求,保障飞行安全。因此,须在规定时间内完成一次体扫描,这对波束驻留时间提出了严格的限制。为解决上述时间资源矛盾的问题,需设计精巧的雷达波束扫描策略。
2 基本兼容工作模式设计
假设雷达工作频率为5GHz,波长6cm,方位和俯仰波束宽度均为3°,天线方位向机械旋转实现360°全覆盖,旋转周期6s,俯仰向电子扫描,气象探测俯仰范围0°~15°。对气象的探测具体要求为:反射率因子Z^测量范围15~75dBz,均方根误差±1dBz;平均径向速度v^测量范围-40~+40m/s,均方根误差±1m/s;径向速度谱宽σ^v测量范围1~6m/s,均方根误差±1m/s。因目标监视的具体要求对结果无影响,本文不详细讨论。将上述参数代入式(1)~(7),可算得雷达目标监视和气象基数据测量要求的驻留时间和脉冲间隔见表1。
表1中反射率因子测量要求的波位驻留时间计算较复杂,且在T等参数确定前无法精确计算。本文取T=400μs,用于平均的距离门数2~4进行估算,波位驻留时间为数十至上百毫秒。具体扫描模式设计中,应根据设计参数进行精确计算。
目标监视要求在6s内完成一次体扫描,平均波位驻留时间(4.2ms)远小于气象平均径向速度测量要求的驻留时间(25.4ms),也远小于反射率因子测量要求的驻留时间。因此,采用同一组波束,无法同时实现目标监视和气象探测,同时满足两者的测量要求(数据率、测量范围、误差等)。
因此,目标监视和气象探测应采用时分复用方式工作,两者交替进行。时分复用设计需考虑以下问题:
a)天线转速对目标监视和气象探测尽量保持一致,避免频繁加减速过程,对探测性能和系统可靠性均有益处。
b)对目标监视来说,插入气象探测必然破坏目标监视连续性,等价于降低目标数据更新率,反之亦然。一般目标数据率要求较高(秒量级),气象数据率要求较低(分量级)。因此,目标监视中断气象探测连续性造成的影响基本可忽略,而因气象探测中断目标监视连续性则须认真考虑。
为解决上述问题,本文提出一种新型X+1兼容扫描模式,如图2所示。其基本原理如下:
a)天线方位旋转1圈时间保持为TU0。
c)在每一圈目标监视中均实现完整体扫描。
d)在1圈气象探测中,每个方位的波束均指向一个固定俯仰角,在下一循环的气象探测中,波束调整至另一个俯仰角。通过多次循环,完成俯仰空域覆盖。
e)在气象探测时,可通过外推保持对目标的稳定跟踪。
定义目标监视等效平均数据更新时间

气象探测等效数据更新时间

式中:Kφ为气象俯仰扫描波位数。X越大,目标监视被中断的频次越低,等效数据更新时间越短,目标检测和跟踪效果越好,但气象探测数据更新时间变长。X越小,气象数据更新时间越短,目标跟踪效果会变差。因此,X值的确定是兼容扫描模式设计的关键,需折中考虑。

表1 雷达测量要求的脉冲间隔时间和波位驻留时间Tab.1 Pulse interval time and beam dwell time requirements for radar estimation

图2X+1兼容模式Fig.2X+1compatible mode
本文中,TU0=6s,若X=1,则目标和气象简单交替工作,TUtarget=12s,不能满足民航标准要求。令X=5,TUtarget=7.2s,气象探测时对目标监视数据通过外推处理,可满足民航标准。对气象探测,取俯仰波束交叠系数为0.15,则Kφ=6,可得TUweather=216s,满足气象探测数据率要求(<300s)。
据《曲艺志》的说法,这个被很多人忽略的版本,影响了徐嘉瑞后来主持的梅葛调查。在1957年的条目下,有这样的话:
综合考虑量程和波形占空比因素,气象探测中取T=400μs,能满足径向速度和谱宽测量所需的相关时间(≤795μs)要求。考虑方位波束交叠系数为0.2,一个方位的驻留时间约为3°×(1-0.2)×6/360°=40ms。
对应一个方位的平均脉冲数为100,全部用于一个俯仰波束的气象基数据测量,能满足平均径向速度测量要求(≥25.4ms)和谱宽测量要求(≥9.5ms)。
对反射率因子测量,需确定独立样本数,具体步骤如下:
a)依据式(2)、(3),可得单个距离单元有效采样点数为9.6;
b)需进行距离平均,由式(4)可得,3个距离单元进行平均后的有效样本数为49,满足要求(≥30)。
3 兼容气象快速扫描模式
上述X+1扫描模式,主要针对目标监视和气象探测在数据更新率和波束驻留时间要求的差异而提出。目标监视数据更新率高、波位驻留时间短,气象探测数据更新率低、波位驻留时间长,本文方法将不同俯仰角度的气象探测,“化整为零”地分散到多轮目标监视功能间,满足两者数据更新率和测量精度要求。
在气象探测中,反射率因子测量与多普勒参数(平均径向速度和谱宽)测量对波束驻留时间、脉冲重复时间的要求也有较大差别。可利用这种差别,进一步发挥相控阵雷达波束扫描灵活的优势。由表1可知:反射率因子测量要求波位驻留时间长,多普勒参数测量要求相邻脉冲相位相关,设计一种基于多路波束转换原理的气象快速扫描方式,可进一步提高兼容模式下的气象数据更新速率[6]。
设雷达俯仰各波束仰角中心分别为θ1,θ2,θ3,θ4,θ5,θ6,如图3所示。多路波束转换扫描采用图4方式,在同一方位的多个仰角波位间轮流间隔发射脉冲(图4采用三个波位组成转换扫描波位组,其中θ1~θ3为一组,θ4~θ6为一组),直至分配完波束在该方位的驻留时间。对同一俯仰波位,如按前文设计参数,相邻发射脉冲间隔将达1 200μs,波位脉冲数约33,由式(4)可知反射率因子估计精度不变,但由于相邻样本间隔变大,样本间相关性降低,对速度谱宽大于4m/s的剧烈气象,其多普勒信息测量误差较大。
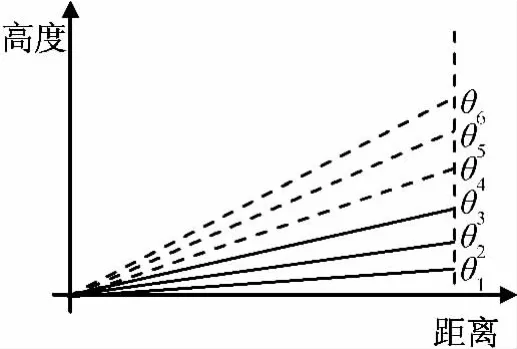
图3 不同转换扫描波位组的时分多路扫描的俯仰波位设置Fig.3 Elevation beam position setting of multiplexed beam scanning strategy with different multiplexed beam groups
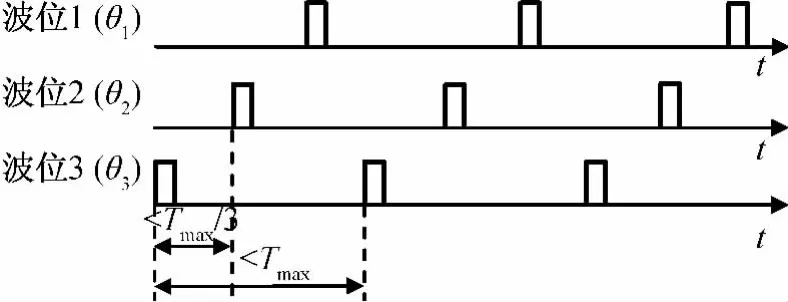
图4 时分多路扫描脉冲发射顺序Fig.4 Pulse transmitting sequence of multiplexed beam scanning strategy
快速多路波束转换扫描方式的优点是利用同样的波位驻留时间实现了气象数据的快速更新,不会降低反射率因子的估计精度,且可测量一定速度谱宽的气象多普勒参数。但这种方式无法准确测量大谱宽气象的多普勒参数,故适于时间尺度小、内部切变不严重的气象探测。此外,快速多路波束转换扫描方式存在旁瓣二次回波,需采取抑制处理。
4 旁瓣二次回波抑制
对图4,若仅关注某一波位的发射波形,其脉冲重复周期为Tmax,故其二次回波是在Tmax以外的回波,这属于经典的二次回波问题,在常规多普勒气象雷达中已有广泛研究,可采用相位编码方法进行抑制。
对多路波束转换扫描方式,波位1、2间存在相互影响。对波位1的第一个脉冲周期,其Tmax/3~Tmax间的回波会进入波束2的旁瓣,2Tmax/3~Tmax间的回波会进入波束3的旁瓣,本文称旁瓣二次回波。与之对应,经典二次回波问题可称为主瓣二次回波。
抑制旁瓣二次回波方法主要有以下两种:
a)对交替扫描的脉冲进行统一相位编码,利用编码后不同波位回波相位的正交性进行抑制[7]。
b)综合考虑所有的待扫描俯仰波位,采用跳跃式多路波束扫描方式。分析各波位天线俯仰方向图,合理设置波位仰角及扫描次序,发射相邻脉冲的波位应避开各自方向图的强副瓣区,采取间隔的扫描波位设计减轻从旁瓣进入的回波[8]。如图5所示,在θ1~θ3转换扫描波位组内,3个波位间隔排列,通过优化波位设置,使组内各波位仰角均不在其他波位方向图强副瓣区。

图5 减轻旁瓣二次回波的波位设置及扫描次序Fig.5 Beam position setting and scanning sequence for reducing second trip echo from sidelobe
5 兼容模式工程实现
上述兼容工作模式,可由合理的系统资源管理技术实现。
兼容工作模式系统的实现如图6所示。资源管理根据显控的工作模式切换命令,完成目标模式、气象模式、目标/气象兼容模式切换。在目标/气象兼容工作模式下,按设计的X+1工作模式,资源管理控制波形发生器进行信号波形变换,控制频率综合器完成信号中心频率切换,控制波控机完成波束指向调度。资源管理还同时对信号处理程序进行切换:在目标监视模式下采用目标信号处理流程,信号处理向数据处理传送目标一次点迹,数据处理由点迹信息形成航迹信息发给显控;转入气象探测模式后,采用气象信号处理流程,信号处理向数据处理传送3种气象基数据,数据处理将气象基数据分类比较形成气象分色显示信息,并完成对跟踪目标的航迹外推处理,将气象分色显示信息和外推的航迹信息同时送往显控。
在上述基本兼容工作模式设计,某方位旋转相控阵雷达在小雨条件下采集的反射率如图7所示。其反射率估计精度可满足航空气象分级要求。
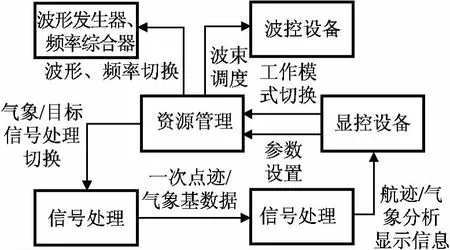
图6 兼容工作模式资源管理实现Fig.6 Realization of resource management for compatible mode
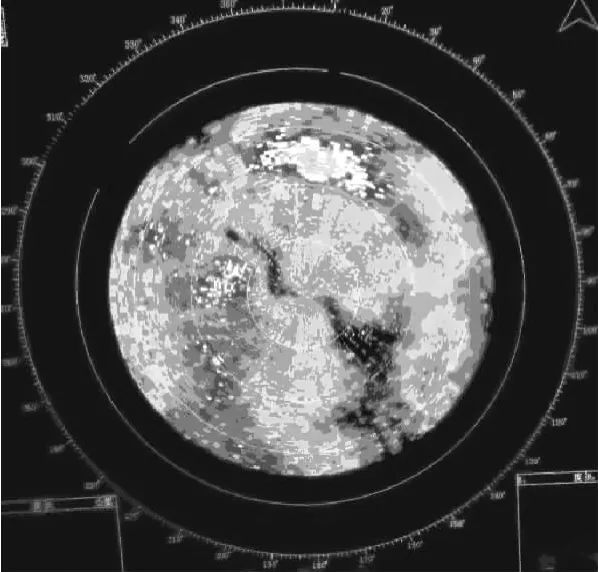
图7 兼容模式下反射率数据实测结果(小雨)Fig.7 Reflectivity data estimation result under compatible mode(light rain)
6 结束语
针对相控阵低空监视雷达集成气象探测功能的需要,本文对多功能相控阵雷达目标监视与气象探测兼容模式设计进行了研究。分析了兼容目标监视与气象探测功能对雷达工作模式设计要求,讨论了气象基数据估计精度、更新率对气象波束驻留时间、波形参数的设计要求,提出了一种目标监视与气象探测分时工作的X+1模式兼容工作模式,同时兼顾两种功能的实现,初步解决了两种功能数据率不匹配、波形设计有差异、波位驻留时间不统一等关键技术。针对时间尺度小但变化不剧烈的气象现象探测,给出了一种可进一步提高气象数据更新率的波)束扫描方法——多路波束转换气象快速扫描方式,提出了旁瓣二次回波解决思路。本文设计的兼容工作模式,在仅增加少量气象信号处理硬件资源的条件下,通过工作模式设计和相关软件设计,实现了目标监视与气象探测兼容。该技术易于实现,可满足兼容工作模式设计需求,实现成本低,可推广性较强,对实现低成本的目标监视和气象探测多功能雷达有一定的参考意义。
[1] TORRES S M,HEINSELMAN P L.Multifunction phased-array radar for weather surveillance:The Sixth European Conference on Radar in Meteorology and Hydrology[C].ERAD 2010.
[2] Sandifer J B.Meteorological measurements with a MWR-05XP phased array radar[D].Monterey:Na-val Post Graduate School,2005.
[3] 张培昌,杜秉玉,戴铁丕.雷达气象学[M].北京:气象出版社,2000.
[4] 焦中生,沈超玲,张 云.气象雷达原理[M].北京:气象出版社,2005.
[5] SKOLNIK M I.Meteorological radar:radar handbook(second edition)[M].New York:McGraw-Hill,1990.
[6] 高玉春,杨金红,程明虎,等.相扫天气雷达扫描方式研究[J].电子学报,2009,37(3):485-488.
[7] SACHIDANANDA M,ZRNIC D S.Systematic phase codes for resolving range overlaid signals in a doppler weather radar[J].Journal of Atmospheric and Oceanic technology,1998,16:1351-1363.
[8] LAI K H,LONGSTAFF I D,CALLAGHAN G D.Super-fast scanning technique for phased array weather radar applications[J].IEE Proc Radar Sonar Navigation,2004,151(5):271-279.
猜你喜欢
冶金能源(2022年5期)2022-10-14
——缺陷度的算法研究
条码与信息系统(2022年3期)2022-07-05
汽车电器(2022年6期)2022-07-02
信息通信技术(2022年2期)2022-05-31
成都信息工程大学学报(2021年6期)2021-02-12
舰船科学技术(2020年3期)2020-04-22
汽车文摘(2018年2期)2018-11-27
农家科技中旬版(2018年7期)2018-09-25
航空兵器(2017年6期)2018-01-24
农业与技术(2016年24期)2017-04-20
