
基于小面模型的车道线提取方法
2014-12-25 03:09:34孙晓军焦金星
军事交通学院学报 2014年1期
孙晓军,李 华,焦金星
(1.军事交通学院 研究生管理大队,天津300161;2.军事交通学院 军用车辆系,天津300161)
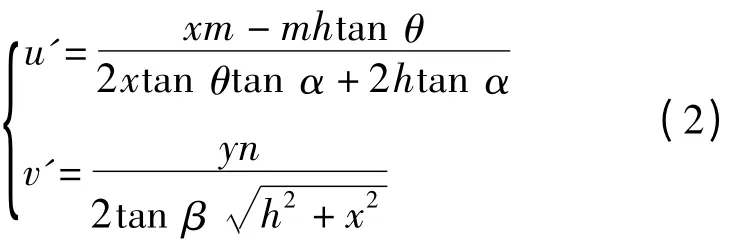
(0,0,h),默认摄像机偏离道路方向的偏航角γ 为0 弧度,图像坐标系以图像中心为坐标原点,反解式(1)可得
智能车辆要实现自主驾驶,首先必须感知车辆周围的环境信息,其中最基本的就是获取车辆前方的道路信息。目前,采用的方法主要有机器视觉技术、雷达技术、高精度数字地图和卫星定位导航技术。人类在驾驶车辆时,驾驶员所获取的信息有90%以上来自视觉,因而智能车辆多采用机器视觉对道路进行检测以实现自主驾驶。
边界线或边缘表示图像中一个区域过渡到另一个区域,通常是以图像中某些特征不连续的行为作为表征的。道路图像中对于车道线的提取属于边缘检测的范畴,在出现车道线的地方其灰度值会发生突变,所以车道线提取可以归结为对道路图像中一些特定边缘的检测。采用的基于Hough 变换的车道线检测方法[1-2]需要进行繁琐的参数计算,而且累加器的选取对检测效率的影响比较大。基于此,本文在对道路图像进行逆透视变换和动态阈值分割的基础上,利用2-D 小面模型快速搜索车道线区域,之后采用数学形态学的相关方法对车道线边缘进行细化,最终筛选出准确的车道线。
1 道路图像预处理
考虑车辆自主驾驶对车道线检测的实时性要求,在应用算法检测车道线之前,首先对车辆前方30 m×18 m(长×宽)区域的图像进行处理,将其转换为俯视图,以消除透视干扰,之后通过动态阈值分割对车道线区域进行粗定位,为利用小面模型对车道线进行快速提取节省时间。
1.1 道路图像投影变换
在满足道路平坦假设的前提下,依据逆透视变换方法[3],将道路图像投影变换到世界坐标系下,以消除其透视效果,得到道路的俯视图像。
定义摄像机的分辨率为m×n像素,视场角度为2α×2β 弧度,按照图1 所示的摄像机位置参量,解算出世界坐标系下路面坐标(x,y,0)与图像坐标系下图像坐标(u',v')之间的关系,即

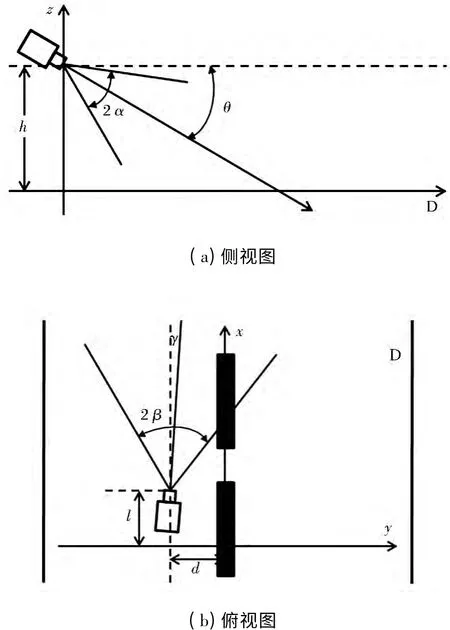
图1 摄像机位置参量示意
假定摄像机在世界坐标系下的位置坐标为
(0,0,h),默认摄像机偏离道路方向的偏航角γ 为0 弧度,图像坐标系以图像中心为坐标原点,反解式(1)可得
依据此逆透视变换理论对车载摄像机拍摄的前方道路图像进行投影变换,得到的俯视图像如图2 所示。
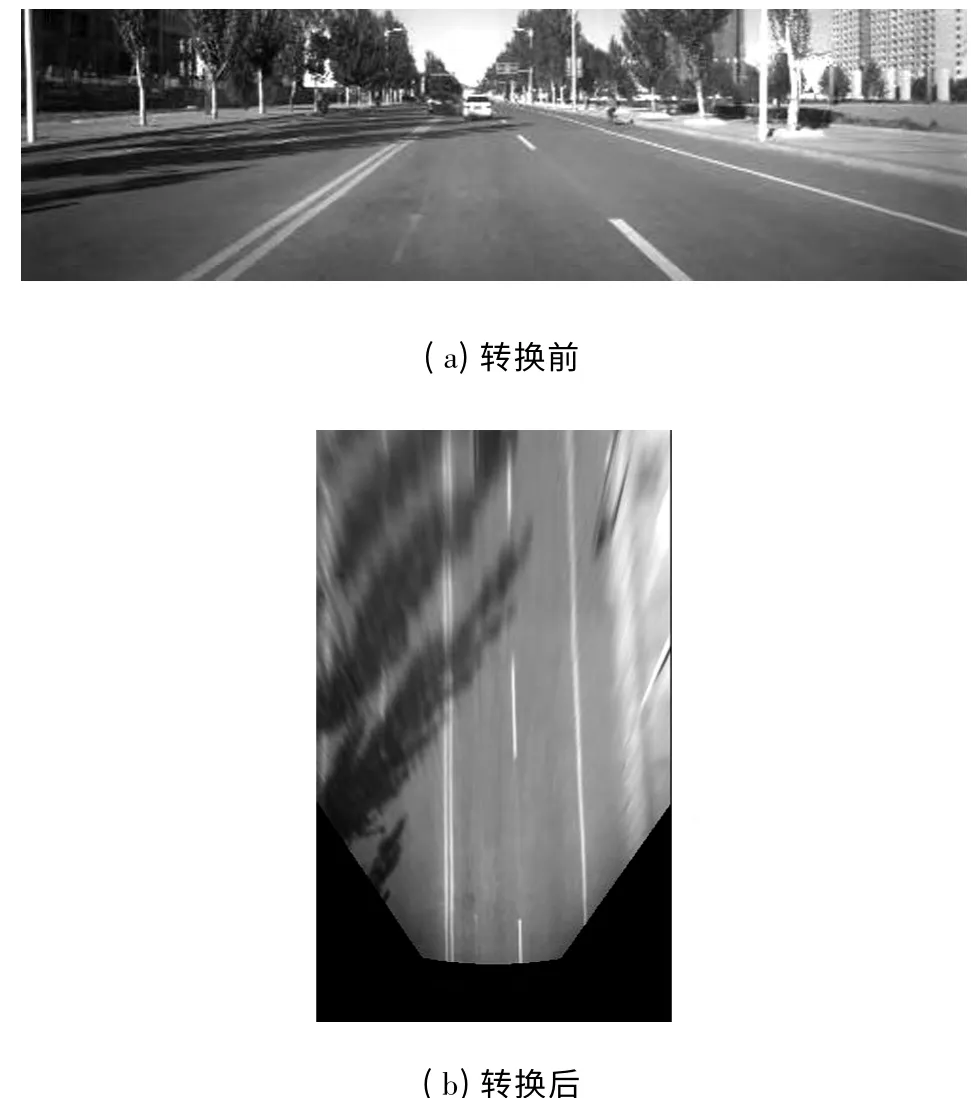
图2 道路图像投影变换
1.2 局部阈值分割
阈值分割作为一种传统的图像分割方法,因其实现简单、计算量小、性能稳定,而成为图像分割最基本和应用最广泛的分割技术。综合考虑对车道线进行提取的准确性和可靠性等要求,本文选取局部阈值分割方法,可以比较容易地将车道线与路面分离开来。
定义g(x,y)为图像中点(x,y)的灰度值,m(x,y)为该点局部邻域的平均灰度值,d(x,y)为该邻域内灰度值的标准差,A为该邻域内的最小灰度值,α 为灵敏度因子,且α∈(-1,1)。令

则

对经过投影变换的道路图像进行局部阈值分割,效果如图3 所示。
2 车道线特征提取
利用小面模型进行边缘检测,需要先对原始图像做正交多项式最佳曲面拟合,然后根据多项式的一、二、三阶导数确定边缘像素并进一步定位边缘位置[4]。考虑到算法的复杂性及运算速度要满足实时检测的需求,本文在假设道路平坦的基础上采用2-D 小面模型进行检测。图像上任一像素点(x,y)在5 像素×5 像素区域的三阶小面模型可表示为

令x=ρcos α、y=ρsin α,则转换成极坐标形式为

计算fα(ρ)的 前 三 阶 导 数,由以下3 个条件判断像素点(x,y)是否为边缘像素:
满足以上3 个条件即可认为像素点(x,y)是边缘像素,其坐标位置为

提取车道线区域的实际效果如图4 所示。

图3 道路图像阈值分割效果
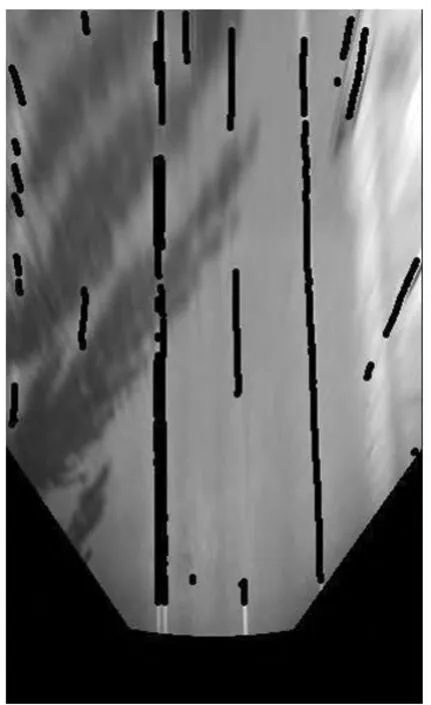
图4 提取的车道线区域
3 车道线边缘细化和筛选
3.1 车道线边缘细化
利用小面模型提取图像边缘容易造成边缘点过多的情况。为了提取更为细腻的边缘,采用数学形态学细化[5]的相关方法,对提取出的车道线区域先进行膨胀运算再进行腐蚀运算,以得到更为清晰的车道线区域。
3.1.1 膨胀运算
膨胀运算是将与目标区域接触的背景点合并到该区域中,从而使目标边界向外部扩张。膨胀运算可以填补目标区域中存在的某些孔洞,消除目标区域中的小颗粒噪声。
在灰度图像中,定义f(x,y)为输入图像,B(m,n)为结构元素,二者的取值范围分别为D1、D2,则灰度膨胀可定义为

点(x,y)的膨胀运算涉及到它周围点的灰度值及结构元素值,是对局部范围内灰度图像的点与结构元素中对应点的灰度值求和,并选取其中的最大值。对图4 提取的车道线区域进行膨胀运算,其结果如图5 所示。
3.1.2 腐蚀运算
腐蚀运算通过消除边界点使边界向内部收缩,可以用来消除细小且无意义的目标物。如果2个目标物之间有细小的连通,可以选取足够大的结构元素,将这些细小的连通腐蚀掉。
在灰度图像中,定义f(x,y)为输入图像,B(m,n)为结构元素,二者的取值范围分别为D1、D2,则灰度腐蚀可定义为

点(x,y)的腐蚀运算就是在它的局部范围内对灰度图像的点与结构元素中对应点的灰度值求差,并选取其中的最小值。将经过膨胀运算的图像再进行腐蚀运算,其结果如图6 所示。
3.2 车道线筛选
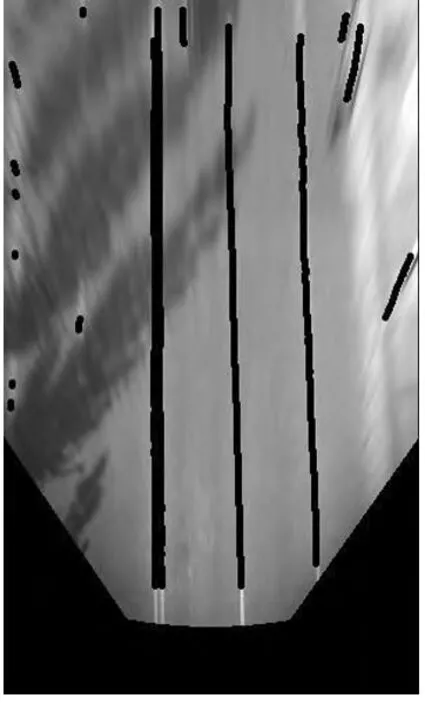
图5 膨胀运算结果

图6 腐蚀运算结果
经过以上步骤可以得到较为精细的车道线区域,接下来要通过逻辑判断分析得出真正属于车道线的线条。该试验在城市中典型的双向6 车道条件下进行,设置最小车道线长度为15 像素(1 像素对应实际长度0.06 m),车道最小宽度为48 像素,车 道 线 斜 率 范 围 为[0. 3,1. 5]或[- 1. 5,-0.3],经过筛选最终标示出车道线如图7 所示。

图7 最终车道线提取效果
4 试验结果分析
在试验过程中,通过记录摄像机采集的图像帧数和车道线检测程序向决策程序发送的车道线识别结果的次数,可统计得到每条车道线的识别率及总体识别率。在车道线检测过程中采用Hough 变换方法,虽然识别率和稳定性已满足高速驾驶的要求,但是进一步提高检测效率难度较大,同时会增加时间成本。本文基于小面模型的车道线提取方法,在保证稳定性的前提下简化图像处理部分,为其他相关部分程序的开发节省了时间。通过在同一路段分别使用Hough变换方法和小面模型方法来检测车道线,统计得到车道线识别率见表1(车道保持状态下,车辆处于第2 和第3 车道线之间)。

表1 车道线识别率统计 %
由于试验过程中会从右侧车道出现超车动作,此外第4 车道线靠近路沿,受杂物遮挡的情况较多,所以总体识别率左侧高于右侧;且采用小面模型方法,4 条车道线同时未识别的情况得到明显减少,验证了该方法的优越性。
5 结 论
本文在对道路图像进行逆透视变换和动态阈值分割的基础上,采用小面模型对车道线区域进行快速搜索,进而利用数学形态学中的膨胀运算和腐蚀运算对车道线边缘进行细化,最终通过筛选获得准确的车道线。试验结果表明,该方法的车道线识别率较原方法有了明显进步,总体可靠性也得到提高。
[1] 鲁曼.高速公路中车道检测技术研究[D]. 长沙:中南大学,2010:37.
[2] 周罗善.基于单目视觉的车道保持预警系统研究[D]. 上海:华东理工大学,2011(1):47-49.
[3] 徐友春.基于机器视觉的汽车主动安全技术的研究[J]. 清华大学学报,2005(16):16-17.
[4] 王凯,张定华,黄鹤龄,等.基于3-D Facet 模型的亚体素边缘检测算法研究[J].机械科学与技术,2005,24(7):865-868.
[5] 施启乐,王从军,黄树槐. 数学形态学图像细化算法在RE中的应用研究[J].华中科技大学学报,2004,7(32):38.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02 02:00:02
卫星应用(2021年11期)2022-01-19 05:13:02
科学大众(2021年9期)2021-07-16 07:02:50
高技术通讯(2021年3期)2021-06-09 06:57:48
中国交通信息化(2020年11期)2021-01-14 03:30:34
散文诗世界(2019年10期)2019-09-10 10:34:07
中国粮油学报(2019年4期)2019-07-12 09:06:30
自动化学报(2017年5期)2017-05-14 06:20:56
光学精密工程(2016年1期)2016-11-07 09:01:59
今日重庆(2016年3期)2016-08-11 07:45:22
