受流器与接触轨端部弯头接触特性分析
2014-12-21 13:26:22王文娇
华东交通大学学报 2014年1期
王文娇
(同济大学铁道与城市轨道交通研究院,上海201804)
随着轨道交通事业的迅速发展,以及城市轨道列车速度的提高,城市轨道交通的受电方式得到了较大的关注。与架空接触网受电方式相比[1-2],钢铝复合接触轨供电系统具有使用寿命长,运营可靠,维修量少且容易、便于管理,电能损耗少,且在城市化发展当中,避免采用接触网,也具有环境美观,占空间面积小等优势,因此采用受流器与接触轨钢表面接触而获得电能的方式普遍得到了设计单位和用户的采用。而接触轨端部弯头作为接触轨系统的重要设备,集电靴在列车速度提高的情况下,能否顺利平滑的通过接触轨轨道端部弯头处,是保证列车能否正常受电及运行的关键。本文对既有的地铁车辆在运行速度为80 km·h-1的速度下所设计的接触轨及受流器状况进行分析,得出了在滑靴通过轨道端部弯头的垂向振动情况,并且制定了在速度提升到120 km·h-1的情况下,满足振动条件的优化方案。该优化方案具有一定的实用性,为轨道交通11号线南端受流器系统开发提供了一定得参考价值。
1 受流器及接触轨Simulink模型建立
1.1 受流器模型的建立
作为三轨受电的重要组成部分[3],受流器的功能是经由接触轨系统,把电力从地面配电输送到地铁或者轻轨车辆上,本文以下接触式受流器为例,采用扭簧调节,利用扭簧的弹性回复力使滑靴与接触轨保持一定的压力[4],压力的大小随受流器系统的垂向振动引起的摆杆转角而变化。而滑靴与接触轨的良好接触是列车稳定运行的前提[5]。图1 为下接触受流器系统的垂向动力学模型。
1.2 接触轨模型的建立

图1 受流器系统垂向动力学模型Fig.1 Vertical vibration model of collector shoe
为了保证受流器系统顺利平滑的通过断轨处,接触轨端部弯头是接触轨系统的关键设备。端部弯头分5.2 m和3.4 m两种[6]。一般情况下高速端部弯头长度为5.2 m,下降坡度为1:40;低速端部弯头长度为3.4 m,下降坡度为1:30。本文以5.2 m端部弯头为例,折弯区由一段弧线和一段斜线所组成,下降高度为140 mm,图2为端部弯头轨道模型。
1.3 受流器系统及接触轨simulink模型的建立
根据受流器系统的垂向动力学模型,对受流器系统进行受力分析,建立受流器系统的数学模型。
受电摆杆的转动振动方程

受电摆杆的垂向振动方程

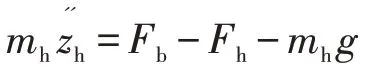
滑靴的垂向振动方程
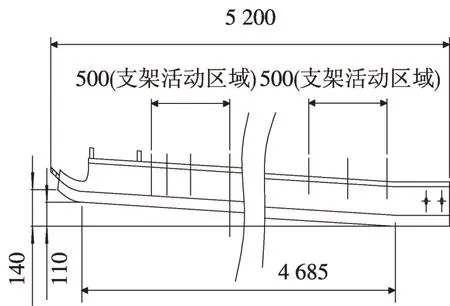
图2 接触轨端部弯头模型Fig.2 Model of third rail ends
其中:Fb=Kb(zh+lbθb-zb)+Cb();Tb=Kfiθb+。
式中:Ib为受电摆杆的转动惯量;Tb为扭簧产生的扭矩;Fb,Fd,Fh分别表示受电摆杆和滑靴之间的垂向力、底座与摆杆之间的垂向力以及三轨和滑靴之间的垂向力;mb,mh分别代表受电摆杆的质量及滑靴质量;lb,ld,lh分别代表Fb,Fd以及摆杆重心对转动中心的距离;zb,zh,θb分别代表摆杆、滑靴的垂向振动位移以及受电摆杆转动角度。
当受流器进入接触轨时[6],受流器碳滑板和接触轨钢带是从完全未接触,到开始接触,随之到临界接触,最后到完全接触。当受流器开始接触三轨时,滑靴和端部弯头的相互作用可根据动量公式计算为Ft=mv;滑靴受到接触轨端部弯头的瞬时冲击,垂向动量转换为对滑靴的冲击力,从而产生一个瞬态振动激扰,使得受流器在接触过程中产生剧烈的暂态向下振动,但是由于扭簧的作用,摆杆得到弹簧回复力,使得受流器向上弹起,滑靴接触到接触轨上,并且和接触轨保持一定的压力,压力的大小随受流器系统的垂向振动引起的摆杆转角而变化。
而衡量列车运行能否正常受电的关键因素是滑靴与接触轨能否良好接触。Simulink模型从滑靴和接触轨的相对位移来判断是否滑靴接触钢轨,从而判断受流器在运行过程中能否正常受电。在建模过程中将接触轨的模型建入到fcn模块中,假设受电靴和接触轨端部弯头的最顶端撞入,即滑靴的初始位移是在距接触轨平缓轨道垂直高度140 mm,在不同工况下判断受流器滑靴的垂向振动位移。在此过程中,若不考虑接触轨的轨道不平顺,而要满足在接触轨的平缓阶段滑靴和接触轨的接触力为120 N 左右。因此在fcn模块中,作出假设,使得满足在水平运行过程中接触力始终保持120 N。只对滑靴和接触轨的相对位移来作为考量,判断滑靴是否脱离接触轨。
2 速度以及车辆随机振动对三轨受流影响
2.1 速度对滑靴通过接触轨端部弯头的影响
对于我国现行的地铁车辆,时速平均为80 km·h-1,而现阶段,上海轨道交通11号线南端的地铁车辆运营速度设定为120 km·h-1。图3中a,b曲线分别表示受流器系统在80 km·h-1及120 km·h-1的情况下滑靴通过接触轨端部弯头的垂向振动位移。
对于端部弯头长度为5.2 m的接触轨,曲线a为速度80 km·h-1的情况下,当受流器系统中滑靴和端部弯头开始接触时,由于受到端部弯头的动量冲击,则会有小幅振动,随后滑靴会沿着端部弯头的坡度运动,且不会脱离接触轨弯头段。受流器系统通过接触轨端部弯头后(即0.23 s左右后),滑靴进入接触轨平缓轨道,滑靴和接触轨的相对位移几乎为0,受流器系统振动幅度较小,处于完全接触状态,因此设计中受流器系统的参数完全满足80 km·h-1的运行速度。但当受流器系统速度提高到120 km·h-1时(曲线b所示),由于滑靴撞击接触轨端部弯头瞬时冲击增大,在端部弯头部分会有两次暂态撞击,使得滑靴脱离接触轨,影响受流器系统正常受电。且在通过5.2 m 的端部弯头后(即0.16s,A 点)进入到接触轨平缓轨道时,滑靴和接触轨之间出现负位移为-17 mm 左右,此时滑靴和接触轨脱离。此后滑靴和接触轨之间出现多次负位移,即多次脱离轨道,影响受流器系统的正常受电。

图3 不同速度下滑靴的垂向振动位移Fig.3 Lateral displacement of collector shoe at different speeds
2.2 车辆随机振动对滑靴通过接触轨端部弯头的影响
由于受流器安装在车体的转向架上,当车辆运行时,受流器受到来自转向架的随机振动激励[9]。因此,在simpack 中建立整车模型,将安装有受流器的构架的垂向速度和位移分离出来,导入到simulink 的模块中。实现车辆-受流系统的耦合。对由于车辆随机振动引起的滑靴的垂向振动影响由图2中曲线c所示,当列车速度为120 km·h-1时由于受车辆随机振动的影响,滑靴的垂向位移会增大(c曲线B点),且恢复到平衡位置的时间也延长,车辆随机振动对受流器系统的垂向振动影响显著。
由于原有的受流器系统参数无法满足车辆在速度为120 km·h-1时受流器和接触轨稳定接触受电。因此需要通过改变参数对之进行优化处理。
3 影响三轨受流参数优化分析
为了满足地铁车辆在速度120 km·h-1的情况下,滑靴和接触轨能够良好的接触受电,作为其重要的动态响应指标受到很多结构参数的影响,通过改变参数,对受流器系统进行动力学仿真分析,并优化参数。
3.1 改变相关刚度
3.1.1 改变受流器系统的相关刚度
由于受流器系统中扭簧的刚度和滑靴与接触轨的接触刚度是影响受流器系统垂向振动响应的重要参数。因此当不考虑轨道不平顺的情况下,根据Fh=-khzh,式中:kh为接触钢度。当改变滑靴与三轨的接触刚度时,滑靴对接触轨的瞬时冲击会减小,但对速度提高到120 km·h-1的滑靴的垂向振动位移无明显影响,图3中a曲线代表接触刚度为2×104N·m-1下滑靴的振动位移,b曲线为接触刚度增大到2×106N·m-1滑靴的垂向振动位移。
图3中c曲线将扭簧的刚度改变为3 200 N·m-1(a曲线为扭簧刚度320 N·m-1)。以同样的120 km·h-1的速度通过轨道端部弯头时,滑靴的垂向振动位移明显的减小,且产生负位移的时间提前,因此在进入到平缓轨道时后,振动幅度相对减小。虽然增大扭簧刚度可以提高受流器的跟随性,但在滑靴进入接触轨端部弯头时,仍会出现两次滑靴和接触轨端部弯头撞击脱离的情况。因此此刚度仍然无法满足速度提升条件下的滑靴和三轨的良好接触,若继续增大刚度,正压力的变化幅度则会增大,导致集电靴磨损加剧,不利于平稳受流。
3.1.2 改善受流器和转向架悬挂刚度
如图1所示,由于受流装置是通过托架固定在构架侧梁的受流器底座上,因此车体的随机振动会引起转向架的垂向振动,从而影响受流器系统的垂向振动。因此通过改变受流器和构架之间的联接刚度从而改善滑靴的垂向振动性能。图3中曲线d是将受流器系统和转向架联接刚度增大到3 000 N·m-1时,当滑靴通过端部弯头进入到平缓轨道后,振动幅度减小,且恢复到平衡位置的时间减少。在进入到平缓轨道时完全不脱离接触轨。因此增大受流器和转向架构架联接处的刚度有助于减小集电靴在高速运行条件下的振动幅度,改善受流器系统的运动性能。
由图3可知,增大受流器的相关刚度以及改变受流器系统和转向架的悬挂刚度有利于提高受电靴的跟随性,但是在滑靴通过端部弯头的过程中,仍然有脱离端部弯头的现象。因此改变刚度无法从根本上解决速度增加时受流器系统和接触轨端部弯头接触时良好受电。
3.2 给受流器系统添加一定的阻尼
由于芯座处扭簧的作用,下接触受流器的滑靴能够保持和三轨接触,且扭簧的刚度越大,集电靴的垂向位移会越小,但对于通过端部弯头影响甚微(图4中曲线c),且在选定扭簧的前提下,扭簧的刚度就已经确定。因此为了改善受流器系统的性能,使其满足120 km·h-1的运行状态,提出增加系统的阻尼。
通过改善扭簧的阻尼来改善弹簧的性能。图5中曲线a为扭簧阻尼为10 N·m·s/deg 的情况下的滑靴的垂向振动响应,曲线b则将扭簧的扭转阻尼改为500 N·m·s/deg,由图可见随着扭簧的阻尼增大,当滑靴进入到接触轨平缓轨道时,滑靴的垂向振动幅度减小,扭簧阻尼的增加有利于提高受流器的跟随性。但是滑靴在接触轨端部弯头阶段,仍会出现脱离接触轨的现象。

图4 不同刚度下滑靴的垂向振动位移Fig.4 Lateral displacement of collector shoe with different stiffness
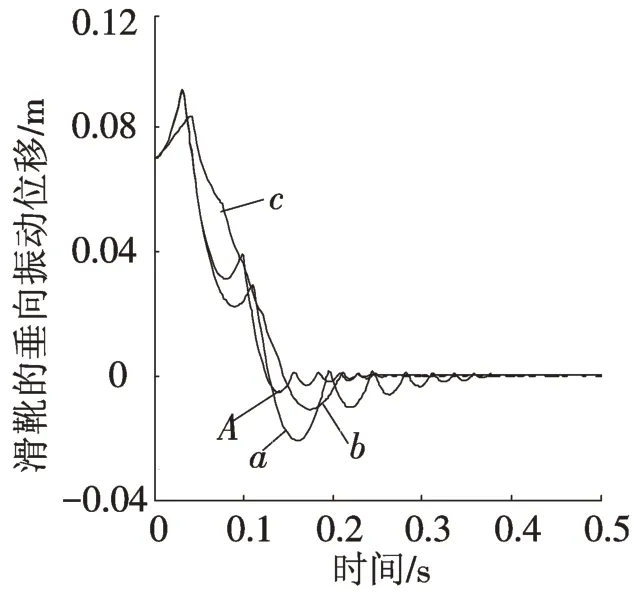
图5 不同阻尼下滑靴的垂向振动位移Fig.5 Lateral displacement of collector shoe with different damping
因此考虑在摆杆和滑靴之间添加一定的阻尼。将摆杆和滑靴之间的阻尼增大到100 N·m·s/deg(曲线a的阻尼为10 N·m·s/deg),可以得到如图5中曲线c所示的滑靴垂向振动响应图。当滑靴进入到端部弯头时,产生一个动量冲击后,随后便沿着端部弯头的坡度运行,虽然在0.13 s(图5中A点)时滑靴从端部弯头最下端进入平缓轨道会产生一个冲击,但冲击较原来相比已经降到不超过10 mm的负位移,随后进入到平缓轨道,滑靴的运行轨迹和三轨的轨迹基本重合,即和接触轨完全接触,恢复到平衡位置。因此在摆杆和滑靴之间增加一定的阻尼有助于减小受流器系统的垂向振动幅度,改善滑靴的跟随性,使得受流器系统通过接触轨端部弯头时能够完全满足速度提升后的运行条件。
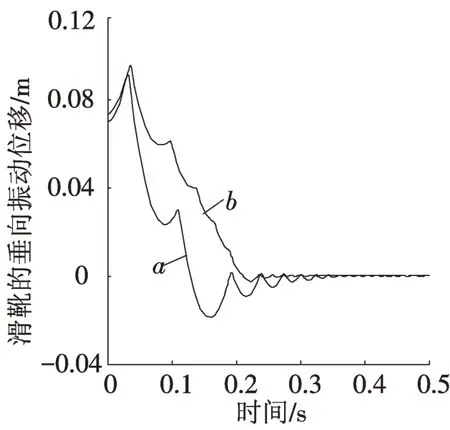
图6 不同坡度下滑靴的垂向振动位移Fig.6 Lateral displacement of collector shoe on different slopes
3.3 改变端部弯头的坡度。
接触轨端部弯头是滑靴顺利通过第三轨断口的关键部件,端部弯头作为过渡部件,需要引导滑靴可靠过渡到正常接触轨的受流面。由于滑靴从离轨到触轨与行车速度,线路条件相关,并且在带电状况下才能完成,因此端部弯头的设置必须考虑适应不同行车速度和线路条件,以减少受流器系统和接触轨的相互冲击及电弧产生,由于滑靴的接触压力与接触轨表面的弯曲程度密切相关,挠曲越大,允许通过的速度就越低,因此可以通过改变端部弯头的坡度来改善滑靴的垂向振动特性。在坡端的接触面到走行轨顶面的垂育距离不变的情况下,图6中b曲线将接触轨的端部弯头的坡度斜率增大到-110/6 835(图6中曲线a端部弯头的斜率为-110/4 850),从而减缓了端部弯头的坡度。由曲线a所示,由于坡度变缓,滑靴进入接触轨端部弯头时的冲击会变小,在端部弯头时振动幅度也明显减少,在到达平缓轨道时滑靴的垂向振动位移已接近于零,使得滑靴从进入接触轨到驶入平缓轨道的过程中几乎完全与接触轨接触。因此改善接触轨端部弯头的坡度,极大的减小了滑靴的垂向振动幅度,提高了滑靴的跟随性,满足速度提升后的运行情况。但是由于坡度变缓,势必会增加轨道的长度,引导长度也会变长,通过计算可得,图6中b曲线的接触轨轨端部弯头的长度为6 996 mm,相比5.2 m的端部弯头,增加了2 m左右。
4 结论
通过对车辆运行速度提高到120 km·h-1的受流器系统和接触轨端部弯头的接触特性分析可见,受流器系统的垂向振动特性受到车辆随机振动以及速度提高的影响。因此通过改变受流器系统的相关刚度,增加一定的阻尼以及改变接触轨端部弯头的形状与坡度,从而改善滑靴的跟随性,提高受流器系统的性能,满足提速要求。为受流器系统及接触轨端部弯头的设计提供了关键的依据。
[1]郑瞳炽,张明锐.城市轨道交通牵引供电系统[M].北京:中国铁道出版社,2000:81-103.
[2]任尊松.车辆系统动力学[M].北京:中国铁道出版社,2007:123-152.
[3]孙放心.广州地铁四号线直线电机车辆集电靴系统分析[J].电力机车与城轨车辆,2009,32(1):46-49.
[4]王振全,李相泉.分体式受流器的结构和性能分析[J].铁道标准设计,2011,54(1):125-127.
[5]王振云,王振全,李相泉.受流器与接触轨匹配特性研究[J].现代城市轨道交通,2011(6):55-57.
[6]李峰.直流1 500 V接触轨端部弯头的研究[J].城市轨道交通研究,2011(6):83-85.
[7]邓谊柏,陈中杰,徐园,等.上海轨道交通11号线南段工程车辆受流器设计[J].技术与市场,2012:19(4):26-28.
[8]陈联彬.地铁第三轨及其受流器的测量系统[J].现代城市轨道交通,2005(1):52-55.
[9]毛利军,雷晓燕.车辆—轨道耦合系统随机振动分析[J].华东交通大学学报,2001,18(2):6-12.
猜你喜欢
装备制造技术(2022年5期)2022-09-06 03:39:22
空间电子技术(2022年3期)2022-08-09 03:12:10
机械制造与自动化(2022年3期)2022-06-24 13:36:58
机械管理开发(2021年9期)2021-10-15 09:11:28
技术与市场(2020年2期)2020-03-05 02:34:04
机械管理开发(2018年12期)2019-01-17 02:08:22
中国铸造装备与技术(2015年5期)2015-12-10 10:23:33
浙江大学学报(工学版)(2015年6期)2015-03-01 01:18:18
机械工程师(2015年10期)2015-02-02 01:14:00
铁路技术创新(2014年4期)2014-10-25 06:11:38