
基于四参数输入的全电AMT离合器模糊控制仿真与试验研究
2014-12-19 01:45李翔晟
制造业自动化 2014年7期
杨 乐,李翔晟
YANG Le,LI Xiang-sheng
(中南林业科技大学 机电工程学院,长沙 410004)
0 引言
全电AMT(电控机械式自动变速器)是在传统手动变速箱基础上,用电机执行机构取代手动操纵机构,以实现离合器自动离合和自动选换档位。汽车起步过程中的离合器控制是难点和核心[1]。在起步过程中,电控单元根据传感器采集的信息,同时对发动机转速和输出转矩以及离合器接合速度进行控制,既要满足起步过程平稳,减小汽车传动系受到的机械冲击,提高乘坐的舒适性;又要尽量缩短起步时间,减少滑磨功损失以提高离合器的使用寿命。因此,必须平衡处理滑磨功和冲击度这一对相互矛盾的评价指标[2]。
目前,针对AMT起步过程离合器控制,主要有以下方法:定量反馈控制[3]、优化控制[4]等。同时,针对AMT发动机控制主要有开环断油控制和模糊控制[5,6]等研究方法。为了提高AMT车辆的起步品质,在基于油门开度和油门开度变化率两参数控制[7]的基础上,增加起步阻力以及离合器主从动盘转速差比作为模糊控制器的输入条件,对离合器的接合速度进行控制和优化,使车辆起步控制能更加全面真实的反映主客观情况,有效的减小冲击度,降低接合过程的滑磨损耗。
1 离合器接合过程数学模型及分析
车辆起步过程中,伴随着离合器的状态由分离到接合。此过程可以分为三个阶段:自由行程段、滑磨阶段、完全接合阶段。发动机转速、离合器从动盘转速、离合器传递的摩擦扭矩以及起步阻力矩 之间的关系如图1所示。离合器接合行程与其传递的摩擦扭矩的关系如图2所示。

图1 离合器起步过程接合示意图

图2 离合器行程L与摩擦扭矩的关系图
1)自由行程阶段
在图1的OA阶段(图2的中I段),离合器主、从动盘未接触,离合器应加快速接合速度,以消除主从动片间的间隙,缩短起步时间。此阶段无扭矩传递,无冲击和磨擦损耗。
2)滑膜阶段
汽车起步过程中的滑膜阶段为图1的AC段(图2的中II段),包含从离合器开始传递磨擦扭矩到离合器主从动盘完成同步的整个过程。
在AB阶段,离合器主从动盘开始开始接触并传递磨擦扭矩且逐渐增大,但仍不足以克服车辆的起步阻力矩。离合器从动盘转速仍为0,但发动机转速有下降。B时刻离合器处于半接合点位置。此时,离合器摩擦力矩Tc等于车辆起步阻力矩,车辆处于运动与静止的临界状态。此阶段主从动盘间存在磨损,但不产生车辆冲击。此阶段的滑磨功可表示为:

在BC阶段,车辆开始起步,从动盘转速开始增加。为获得平稳起步,应放缓接合速度,减少传动系的冲击载荷。同时,应避免滑磨时间过长影响离合器使用寿命。此阶段的滑磨功为:

由上式可以知道:
(1)车辆起步阻力矩越大,则磨擦力矩越大,滑磨功越多;
(2)油门开度越大,则发动机转速越大,离合器主从动盘速差越大,滑磨功越多。
3)完全接合阶段
离合器慢接合到达图1的C点之后(图2 中的III段),主从动盘转速完成同步。此时的接合速度对于冲击度和滑磨功W没有影响。因此,此阶段应以尽快的速度达到完全结合位置。在过程中,发动机转速逐步下降,在这一阶段要通过踩油门配合以控制发动机转速,避免熄火。
2 起步评价
车辆起步品质的好坏可以用冲击度的大小来评价。为平衡冲击度与滑磨功,保证滑磨损失不至于过大,要使冲击度适中。冲击度用J(最大推荐值为10m/s3)表示:

式中a为车辆的纵向加速度。
根据汽车的行驶方程[8]:

式中,Tc为离合器传递的摩擦扭矩;m为汽车总质量(kg);r为汽车驱动轮滚动半径;i0为主减速比;ig为变速箱速比;为传动系传动效率;为汽车平移质量转化为旋转质量的转换系数。根据(4)式并简化得:

由于道路阻力矩变化不大,简化后得冲击度的表达式为:

可见,起步阶段的磨擦扭矩变化率决定车辆冲击度。想要控制冲击度在一定的范围内,磨擦扭矩的变化应保持平缓,不应有较大的突变。在半接合状态,有如下关系[9]:

式中:L为离合器行程,Kc为离合器膜片弹簧刚度。由式(7)可知,磨擦扭矩的变化率由接合速度决定。因此,离合器的接合速度决定汽车起步阶段的冲击度。
3 模糊控制
3.1 离合器接合控制过程输入参数的选取
在车辆的起步过程中,驾驶员的起步意图和起步工况将决定车辆的起步品质。而选取合适的控制参数,对离合器的控制至关重要。
1)起步阻力
2)油门开度 及其变化率
油门开度 以及变化率是驾驶员起步意图的体现。驾驶员可以通过调节油门开度,调节发动机转速,决定离合器接合速度Vc。在ne突然上升时,说明离合器接合速度过慢而油门开度变化率增加较快,此时应该加快离合器的接合速度来降低发动机转速;在ne突然下降时,说明发动机负载过大,应减小离合器的接合量,应保证发动机实际转速大于目标转速,避免发动机熄火。油门开度的变化率体现了驾驶员综合路况车况等因素之后做出的判断。不同的油门开度及其变化率,体现不同的驾驶意图。
3)发动机转速ne及离合器主从动片的转速差比
离合器的接合速度将影响发动机转速ne,二者存在ne=f(vc)的关系。在起步阶段,离合器接合速度过快,会使发动机过载而导致转速下降甚至熄火;接合速度过慢,则会引起滑磨功增加。离合器主从动片的速差比N=(ne-vc)/ne,它反映了离合器的接合程度。速差比大时,适当降低接合速度以减小起步冲击;速差比小时,可以适当加快接合速度,缩短滑磨时间。
3.2 模糊控制原理
模糊控制的原理是:把控制器的输入变量,经过模糊化、依据模糊规则库进行的模糊推理、清晰化,输出控制量的过程。其原理如图3所示。
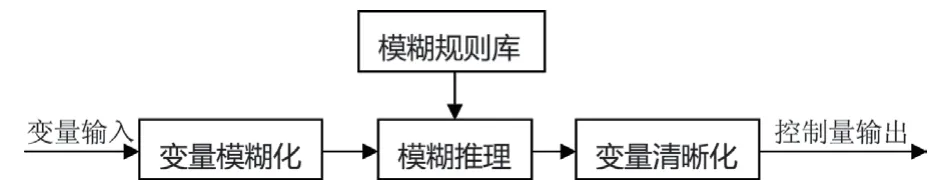
图3 模糊控制原理图

图4 离合器模糊控制框架图
由油门开度 及其变化率共同反映驾驶员起步意图,综合主从动盘速差比N来决定离合器初级接合速度。根据不同的起步阻力,控制离合器最终接合速度。离合器模糊控制框架图如图4所示。
1)输入输出变量的模糊分割
为取得满意的控制效果,同时避免控制规则过于复杂,应灵活的划分模糊变量的论域等级。此模糊控制中,将油门开度(0-)分为7个区间:{非常小(VS)、小(S)、较小(LS)、中(M)、较大(LB)、大(B)、非常大(VB)};油门开度变化率的模糊量论域集为{负大(NB)、负中(N M)、负小(N S)、零(Z E)、正小(PS)、正中(PM)、正大(PB)};速差比的论域集可用{小(S)、中(M)、大(B)}共3个状态量表示;起步阻力的论域集可分为{小(S)、较小(LS)、中(M)、较大(LB)、大(B)}。控制器的输出量离合器接合速度的论域集为{非常小(VS)、小(S)、较小(LS)、中(M)、较大(LB)、大(B)、非常大(VB)}。因此,此模糊控制器最多可能有M=7×7×3×5=735条模糊规则。
2)隶属函数
此模糊集合的隶属度函数采用高斯函数,其表达式为:

式中,x0决定函数的中心位置;是方差。决定函数的宽度,即灵敏度。
3)模糊推理算法
本系统采用Mamdani系统。Mamdani模糊规则的前件与后件均是用语言表示的模糊集合。此方法模拟人的控制过程,且不要求已知的受控对象模型,实现比较容易[10]。本系统的输入输出变量的模糊控制规则如表1~表3所示。
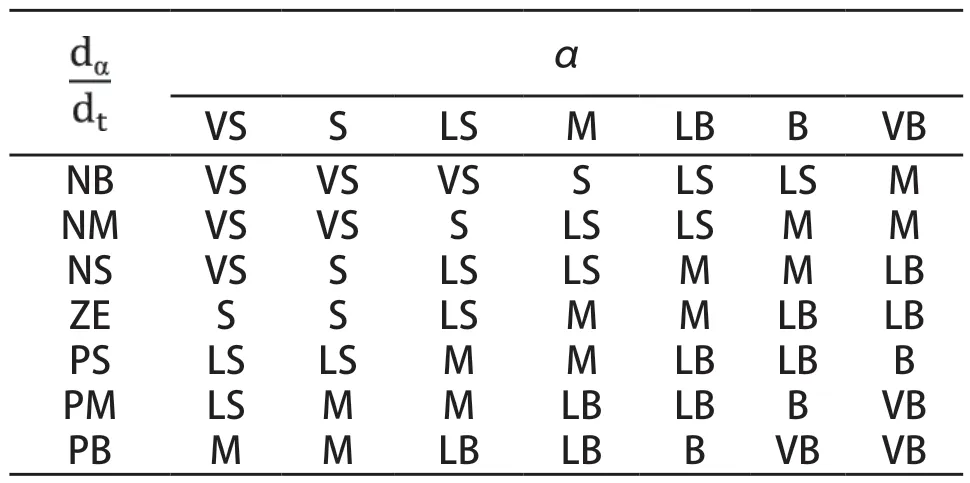
表1 油门开度与油门开度变化率控制接合速度规则表

表2 油门开度与起步阻力控制接合速度规则表

表3 油门开度与转速差比控制接合速度规则表
4 仿真及分析
将油门开度、油门开度变化率、转速差比以及起步阻力作为输入变量,借助软件MATLAB/Simulink,使用控制单一变量的试验方法,分别对车辆在平路和坡路、满载和空载的情况下,进行快/慢起步的仿真。综合分析各起步时离合器的接合情况。仿真结果如图5所示。

图5 车辆起步过程中的离合器接合状态

表4 起步工况试验数据
从图5可以看出各起步工况下的同步转速、半接合点以及同步时间;表4则可以得出不同起步工况下的冲击度及其变化。
1)起步意图的不同,会影响离合器的接合状态。相较于慢起步,车辆快起步过程中,半接合点出现的时间更早,发动机转速和离合器从动盘转速变化率更大,冲击度增大,整个过程离合器接合速度更快。
2)起步阻力的变化,同样会影响离合器的接合过程。在坡道或满载的情况下,由于起步阻力矩增大,需要更大的摩擦扭矩才能达到半接合点,半接合点出现时间更晚。同时,离合器从动盘转速变化缓慢,离合器接合速度较慢,使得滑磨时间增长,滑磨功增大。
5 结论
本文在对起步过程离合器接合过程进行分析的基础上,以油门开度、油门开度变化率、离合器主从动盘转速差比以及起步阻力作为模糊控制的输入,基于驾驶员的经验,提出离合器的模糊控制方法并对六种离合器起步工况进行模型仿真。仿真结果表明,运用四参数输入模糊控制的方法,通过控制单一变量,能够很好的控制离合器的接合,全面的反映离合器接合过程中发动机和离合器状态。制定较好模糊控制策略,可以减少起步阶段的机械冲击,充分利用发动机的功率,减少滑磨功,延长离合器的使用寿命。
[1]Lei Yulong,Niu Mingkui,Ge Anlin.A research on starting control strategy of vehicle with AMT[J].SAE Paper,2000-05-00d7.
[2]XIE Xian-ping,王旭东,WU Xiao-gang,余腾伟.车辆起步过程发动机恒转速自适应模糊控制研究[J].系统仿真学报,2008,20(16):4382-4386.
[3]汤霞清,侯朝桢.基于定量反馈理论的AMT离合器接合控制研究[J].北京理工大学学报,2002,22(1):94-97.
[4]江发潮,陈全世,曹正清.机械式自动变速器的离合器优化控制[J].清华大学学报(自然科学版),2005,45(2):242-245.
[5]马景龙,刘振军,秦大同,张辉.重型AMT汽车发动机转速控制[J].内燃机,2007,(4):21-23,37.
[6]王云成,施国标,唐志东,吴锦秋.模糊控制在AMT系统发动机转速控制中的应用[J].内燃机工程,2000,21(2):11-16.
[7]葛安林.车辆自动变速理论与设计[M].北京:机械工业出版社,1993.
[8]余志生,主编.汽车理论(第4版).北京:机械工业出版社,2006.
[9]徐石安,等编著.汽车离合器.北京:清华大学出版社,2005.
[10]孙增圻,等编著.智能控制理论与技术(第2版).北京:清华大学出版社,2011.
猜你喜欢
商品与质量(2021年43期)2022-01-18
湖南电力(2021年4期)2021-11-05
岷峨诗稿(2020年4期)2020-11-18
初中生世界·九年级(2020年9期)2020-09-21
汽车电器(2018年8期)2018-08-25
汽车零部件(2018年5期)2018-06-13
汽车零部件(2017年2期)2017-04-07
火力与指挥控制(2016年8期)2016-09-21
汽车之友(2016年10期)2016-05-16
中学生理科应试(2014年12期)2015-01-15
