
基于状态的某型无人机系统维修研究
2014-12-14 07:08汤超君
重庆理工大学学报(自然科学) 2014年1期
陈 卫,汤超君
(陆军军官学院,合肥 230031)
随着高新技术的发展及其在军事领域的广泛应用,武器装备越来越复杂,维修保障任务也越来越繁重。与发达国家相比,我国无人机系统在维修理念、技术和管理上相对落后,处于传统、经验型阶段,数字化、信息化水平较低,新技术的应用不够广泛。某型无人机系统部、组件数量大,种类多,维修检测设备少,加上定期维修工作量大导致维修过程繁杂,效率低。维修装备、备(配)件、人员分工等维修资源的科学化管理与合理化统筹成为该型无人机系统维修保障工作中的瓶颈。基于状态的维修(condition based maintenance,CBM)为解决上述问题提供了可能。采用CBM对无人机系统的运行状况进行在线或离线的监测,通过对所测状态参数值的分析决定装备的维修需求,是实现无人机系统维修的重要基础和支撑条件[1]。
1 CBM概念及特点
1.1 概念
基于状态的维修是一种先进的维修方式,它通过状态监测技术获取反映装备状态的有关信息,利用信号分析、故障诊断、可靠性评估、寿命预测等技术判断装备的状态,识别缺陷的早期征兆,对缺陷情况以及缺陷状态的发展趋势进行分析和预测,并根据对装备缺陷的状态诊断和预测选择维修策略。CBM的定义是[2]:通过监测设备或人工传感器,采用监控和统计处理控制技术,监测装备的工作状态,根据监测和分析诊断的结果安排检修时间和方式。对某型无人机系统开展CBM是指:通过内置传感器监测装备的工作状况及健康状态,以降低装备维修费用为前提,合理选择维修策略,根据装备的优先等级、重要程度和故障模式等特征建立装备维修管理流程。
1.2 特点
CBM是一种新型维修方式[3-4]。与传统的维修方式相比,其特点如下:CBM能对装备实现“精确化”维修,在制定维修策略时充分考虑系统运行状态及装备研制、使用造成的差异,尽可能在故障发生前进行维修;能实时掌握装备技术状态,运用数据分析和决策技术预测装备寿命并实施维修,有效节约维修费用,减少停机时间,延长装备使用寿命,提高装备完好率和可用度。
2 某型无人机系统开展CBM的可行性和有效性准则
2.1 可行性准则
一般说来,装备的故障总有一个产生、发展的过程,尤其是由磨损、腐蚀、老化、断裂、失调、漂移等因素引起的故障更为明显,大都存在由潜在故障发展到功能故障的过程。对无人机系统开展CBM,是基于装备由潜在故障发展到功能故障的过程的规律,将焦点集中在P-F间隔(从潜在故障发展到功能故障的间隔期[5],P为能够检测到的潜在故障点,F为功能故障点)中的无人机系统状态变化,达到预测故障的目的。某型无人机系统满足开展CBM的可行性原则:①存在明显的潜在故障间隔P-F;②P-F间隔期比较稳定;③对潜在故障的检测以及维修时间要小于P-F间隔。
2.2 有效性准则
1)基础条件。基于状态的维修可通过状态监测技术对装备运行状态进行监测,通过故障诊断技术和寿命预测技术对装备故障进行早期诊断,并对未来发展趋势进行预测。维修人员可以根据装备状态诊断和预测的结果,综合考虑装备的备品备件、单位的维修力量等因素,提前做好维修前的准备工作,灵活制定维修方案。
2)针对性。基于状态的维修着眼于无人机系统的具体运行状况,以其真实状态作为维修的依据,利用各种先进的技术和方法对被监测装备的真实状态进行评估,根据评估的结果来决定是否维修和何时维修,因此克服了维修的盲目性,缩短了维修时间,提高了装备完好率,并可有效减少由于维修不足而引起的意外故障,同时也可有效减少由于维修过剩带来的资源浪费。
3)可操作性。状态维修是基于计划展开的,而且这种计划是建立在装备实测“状态”的基础上。状态维修强调有计划地进行检测,也强调提前对各种可能的故障做出相应的预案,计划好维修措施,因此其可操作性更符合实际。
4)监测间隔。按经济性要求确定状态监测的间隔期。当故障不危及装备安全,而预防性维修工作的费用损失少于故障损失时,则按最少费用损失的要求来确定状态监测的间隔期。
3 某型无人机系统维修方式选择及决策
3.1 维修方式的合理选择
某型无人机系统维修的首要目标就是保证装备的完好性和可用性,并确保训练、作战任务的顺利完成。装备维修方式的选择应按照装备特点及分类进行,其流程如图1所示。对于关键装备(无人机系统装备中的核心装备,维修费用较高),由于其运行状态直接影响到任务的完成,在技术和经济可行的情况下,先采用状态维修方式,否则采取定期维修方式。将无人机系统中运行状态不会直接影响到整个系统运行过程的装备定义为非关键装备,进一步区分为主要装备和次要装备。对于主要装备,除故障突发的特殊情况,应采用定期维修方式;对于次要装备,由于其失效对整个任务完成影响甚微,考虑到经济性因素,应采用事后维修。
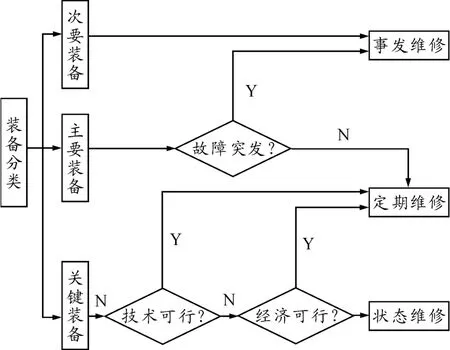
图1 装备维修方式选择流程
3.2 维修方式决策
某型无人机系统由控制导航、飞行器、综合无线电、任务设备等分系统组成。依据关键设备等级划分及权重确定,采用层次分析、Delphi和模糊矩阵判别等方法,按照风险水平分类设置等级参数向量[6]C=(4,8,12,16,20)T,确定关键设备评判等级,进行维修决策(见表1)。
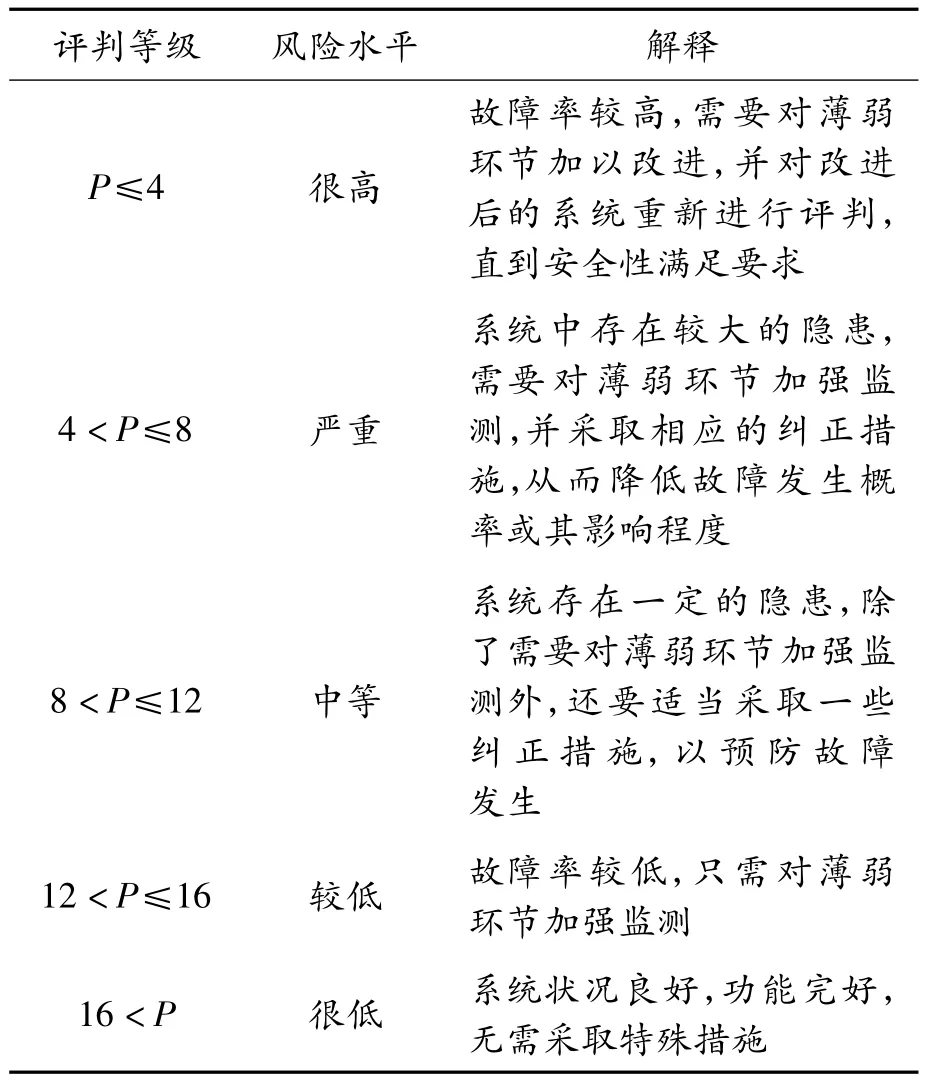
表1 风险水平分类
某型无人机分系统关键设备中,控制导航系统、无人机机体、动力装置、发射装置、回收装置、综合无线电系统、电源系统的等级参数向量C分别为14.3、16.03、13、13.34、11.36、14.46、15.27(计算过程参考文献[5])。根据评判等级的划分,可以看出某型无人机分系统风险水平较低,说明该型无人机分系统的故障率较低,应针对各分系统关键设备中存在的薄弱环节采取状态维修,对其他装备采取定期维修或事后维修。通过计算结果数值比较知:该型无人机系统的回收装置故障率相对较高,对系统运行影响较大,首先需要对其采取状态维修,提高回收装置可靠性和可用性。
4 某型无人机系统CBM体系结构
根据CBM定义,分3层建立某型无人机系统CBM体系结构(图2):第1层是传感器层,由无人机上的传感器和监测设备构成,完成原始数据的收集;第2层由数据处理设备构成,完成多信源的数据融合;第3层由推理机构成,完成各分系统及关键设备的运行状态评估与维修方式选择及决策。
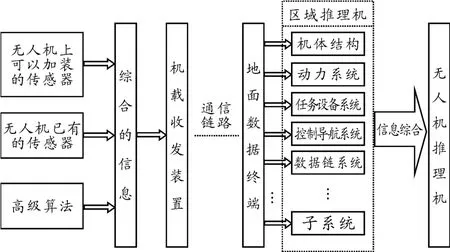
图2 某型无人机系统CBM体系结构
5 结束语
本文首先针对无人机系统维修现状分析了某型无人机系统开展CBM的意义,阐述了CBM的基本概念,对该型无人机系统开展CBM的可行性和有效性进行了分析;其次分析了该型无人机系统维修方式选择及决策;最后构建了该型无人机系统CBM体系结构。基于状态的某型无人机系统维修为无人机系统作战效能的发挥提供了保障。
[1]Army U S..Eyes of the Army U.S.Army Roadmap for Unmanned Aircraft Systems 2010-2035[M].F Alabama:ort Rucker,2009.
[2]Sandy D.Maintenance terminology—some key terms.[EB/OL].[2004-01-06].http://www.plant-maintenance.com.
[3]张亚妹,贾云献.基于状态的维修及其发展方向[J].中国设备工程,2007(3):10-11.
[4]黄爱梅,董蕙茹.基于状态的维修对飞机装备维修的影响研究[J].装备指挥技术学院学报,2011(2):122-125.
[5]冯保东.马俊文.黄艳松.状态维修技术在提升装备维修保障能力中的应用[J].四川兵工学报,2013(2):89-91.
[6]畅伟.基于FMECA和模糊综合评判的无人机系统安全评价研究[D].合肥:陆军军官学院,2012.
猜你喜欢
环球时报(2022-09-07)2022-09-07
环球时报(2022-05-26)2022-05-26
冶金设备(2020年2期)2020-12-28
小哥白尼(趣味科学)(2020年6期)2020-05-22
小学生作文(低年级适用)(2019年5期)2019-07-26
中国交通信息化(2018年6期)2018-08-29
读友·少年文学(清雅版)(2018年12期)2018-04-04
中国交通信息化(2016年6期)2016-06-06
中国交通信息化(2016年5期)2016-06-06
山东青年(2016年3期)2016-02-28
