
水下航行器导航系统的模糊自适应多模型滤波方法
2014-12-05 02:19许昭霞王泽元吴振东
舰船科学技术 2014年8期
许昭霞,王泽元,吴振东
(1.中国人民解放军61081 部队,北京100094;2.中国人民解放军61618 部队,北京102102;3.中国船舶重工集团公司 第七一四研究所,北京100012)
0 引 言
高精度导航系统可保障水下航行器顺利完成任务,由于组合导航技术具有导航精度高,可靠性强等优点,被广泛应用于高精度导航系统[1]。对于组合导航系统模型为精确已知情况,可以用卡尔曼滤波方法进行状态估计,获得状态的精确估计值。但对于实际的水下航行器组合导航系统而言,因处于复杂的工作环境,不易获得精确量测噪声的统计特性,影响系统对状态误差的估计[2]。
为在线估计量测噪声统计特性,文献[3-4]采用自适应滤波方法,通过分析实时量测信息实际方差与理论方差的差异,设计推理模型在线实时调整量测噪声矩阵。文献[5]采用模糊系统调整滤波器的增益系数,在线自适应调整子滤波器,并对联邦滤波器信息分配系数进行模糊自适应调整。但是这些方法均假设系统模型固定不变,降低了估计算法的抗干扰能力。
本文针对上述问题,为提高估计精度和抗干扰特性,将模糊逻辑与多模滤波算法相结合,设计了基于模糊自适应的改进多模型滤波算法,减少模型误差对状态估计的影响,利用滤波信息的统计方差和计算方差的偏差作为模糊系统输入,设计模糊推理系统调节量测噪声方差。所提方法可以增强系统滤波模型对外部环境的适应性,有效提高水下航行器组合导航系统的精度。
1 组合导航系统滤波模型分析
对于水下组合导航系统,线性化后离散系统数学模型如下[5-6]:

式中:xk为状态向量;zk为观测向量;Φk为状态转移矩阵;Γk为噪声干扰矩阵;Hk为观测矩阵;ωk,υk为零均值高斯白噪声,且。
由于水下航行器处于复杂的工作环境,当其滤波模型建模为式(1)的形式,对外部环境的适应性不强,因此建模为含有时变参数的卡尔曼滤波模型[7],考虑到水下航行器滤波模型在状态方程中不包含时变参数,时变参数只影响观测方程,针对此特点,对多模型方法进行改进,建模为如下形式:

式中:sk为时变参数向量,其取值为有限的一系列真实值,sk∈{s1,s2,…sn},n 为参数向量可能取值的个数,sk只影响系统观测方程,且其变化符合半马尔科夫假设,离散系统式(2)可以依据参数sk的不同分为n 个子系统。
基于贝叶斯估计理论和全概率公式,在估计方差最小条件下,sk的最优估计为:

式中:模型匹配概率p(sk=si| Z0:k)计算公式如下:

式中:分母p(zk| Z0:k-1)为归一化系数,由全概率公式计算。式(4)中分子第一项似然函数p(zk|Z0:k-1,sk=si)与最新观测量zk有关,体现观测更新后的模型概率更新,利用子滤波器的观测信息γk(si)及其协方差阵Sk(si)求得,即

式中γk(si)和Sk(si)为观测新息及其协方差阵。

式(4)中分子第二项p(sk=si| Z0:k-1)体现先验知识,利用马尔科夫状态转移概率递推求得,即

通过式(3)~式(5)和式(8),可得到参数sk的估计值,将代入式(2),消除滤波模型的不确定性,然后可采用扩展卡尔曼滤波算法得到状态的估计值。
2 模糊自适应多模型滤波算法
从上述分析可知,求解式(5)过程中需要得到准确的观测噪声统计特性,然而,在实际应用中,由于环境干扰等多方面因素,很难先验给出观测噪声方差的精确值,降低似然函数的估计精度,进而影响多模算法整体估计性能,下面给出本文提出的模糊自适应扩展卡尔曼滤波结构,应用协方差匹配技术设计模糊推理方法,在线调整传感器观测噪声协方差矩阵。
2.1 模糊自适应扩展卡尔曼滤波结构

观测信息的实际协方差通过在1 个大小为N 的移动估计窗口中取平均值近似得到:

式中:i0=k-N+1 是在估计窗中的第一次采样,这表明只有最后的N 个采样时刻的γi值被用于估计其协方差,N 根据经验选取使得协方差的计算具有较好的统计性(N=10 或15)。当信息序列的实际协方差与其理论值有偏差时,通过模糊推理系统根据这个偏差调整Rk。为了描述与Sk之间的偏差,定义新的变量匹配度:

理论上说,如果滤波过程中设定的Rk与真实值相符,则Mk应该为一小量,因此可以通过判断Mk的大小来自适应调整Rk的大小,进而改变Sk的大小,使Mk趋于0。由于Rk为对角阵,可以设计单输入单输出的自适应算法调整Rk的第i 行上的对角线元素Rk(i)。为了调节系统特性,设定相对于Rk(i)阀值μk(i)>0,具体调节方式如下:
2)如果Mk(i)>μk(i),表明减小Rk(i)值。
3)如果Mk(i)<-μk(i),表明,增大Rk(i)值。

式中:ΔRk(i)为每个瞬时时刻从Rk(i)中增加或减去的因子;ΔRk(i)为模糊推理系统的输出;Mk(i)为模糊推理系统的输入。系统结构如图1所示。
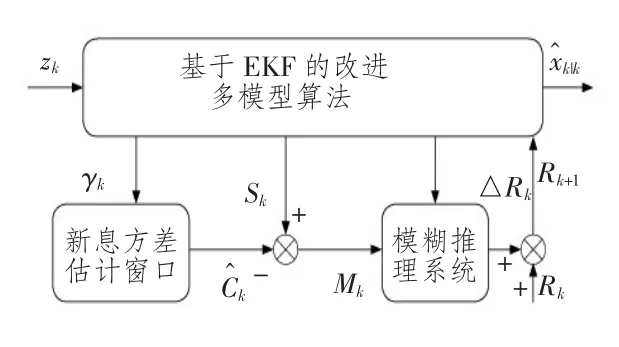
图1 观测噪声方差模糊自适应滤波结构图Fig.1 Block diagram of fuzzy adaptive filtering on measurement noise
2.2 观测噪声方差模糊自适应算法
由图1 可见,模糊推理系统的输入为新息序列的实际协方差与其理论值的匹配度Mk,输出为观测噪声估计值的增量。模糊推理系统的主要包括:数据预处理、隶属度函数定义、模糊规则和输出数据反模糊化。
1)数据预处理
为了实现算法的通用性,首先对Mk(i)进行归一化处理:

传感器的测量噪声调整量ΔRk(i)的范围定义与传感器特性当关,定义归一化的测量噪声增量。将的范围定义为[-1,1],则测量噪声的增量由式(4)得到:
式中:m0为一正常数,m0的选取影响Rk(i)的收敛速度和收敛精度。m0值选取较大,Rk(i)可以迅速逼近真实的量测噪声矩阵,Rk(i)振荡严重;m0值选取较小,Rk(i)收敛速度较慢,估计方差较小。
2)隶属函数定义
模糊推理需要利用输入、输出变量的模糊集、论域和隶属度函数,将变量的精确值映射到模糊集上。定义的模糊集为P(正),Z(0),N(负)。~Mk(i)的隶属度函数采用三角形函数。输出变量是归一化的测量噪声增量,通过它实现测量噪声的自调节。定义的模糊集为I(增大),M(保持),D(减小)。输入输出变量的隶属度函数采用三角形函数,如图2和图3所示。
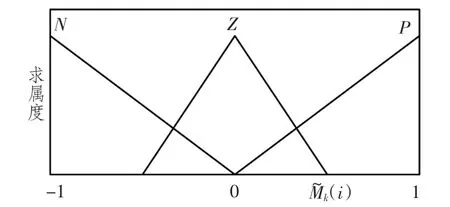
图2 观测噪声方差输入变量的隶属度函数Fig.2 Membership grade of measurement noise covariance input variable

图3 观测噪声方差输出变量的隶属度函数Fig.3 Membership grade of measurement noise covariance output variable
3)模糊规则
定义输入输出变量后,可以利用以下模糊规则进行模糊推理。每个模糊推理系统规则库中包括3个模糊规则:
4)输出数据反模糊化
2.3 算法实现
基于模糊自适应改进多模型滤波算法的计算步骤如下:
1)初始化
确定参数集合{s1,s2,…sn}和模型转换概率θαi(tk),i=1,2,…n,α=1,2,…n,计算初始状态估计值、协方差阵。


3)更新模型概率

其中p(zk| ρk=ρi,Z0:k-1)由式(5)得到。
4)估算导引头观测方程阵
若k 小于设定观测窗口值设定值,则

若k 大于窗口值设定值,利用前面提出的模糊推理方法,得到ΔRk,则

利用式(4)和式(3)计算模型概率p(sk=si|Z0:k),得到参数s 的估计结果。

3 仿真结果与分析
仅考虑在固定水深下的航行,水下航行器组合导航系统的仿真模型和条件同文献[2],仿真时间取1 000 s。从仿真时间600 s 开始,将系统噪声干扰的方差阵参数取为600 s 前的100 倍。
为验证本文提出方法的有效性,采用本文的方法和卡尔曼滤波算法进行仿真,2 种方法在纬度和经度方向的位置误差仿真结果如图4和图5所示。
由仿真曲线可知,采用模糊自适应改进多模型滤波算法可以有效地降低系统状态误差,加快滤波状态收敛速度;仿真时间在600 s 后,单一卡尔曼滤波器由于噪声矢量和方差阵固定不变,导致滤波效果不好,而模糊自适应改进多模型滤波算法仿真结果不受影响。
因此,在系统噪声和噪声模型不准确的情况下,模糊自适应改进多模型滤波算法可以有效地抑制系统滤波发散,提高系统估计精度。
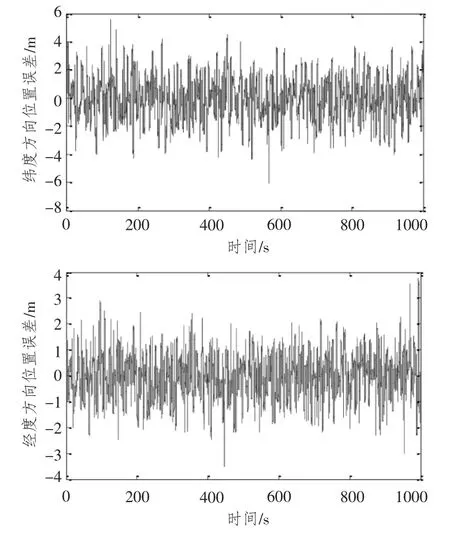
图4 模糊自适应多模型滤波算法的位置误差曲线Fig.4 Position error curve of fuzzy adaptive multiple model Kalman filtering algorithm
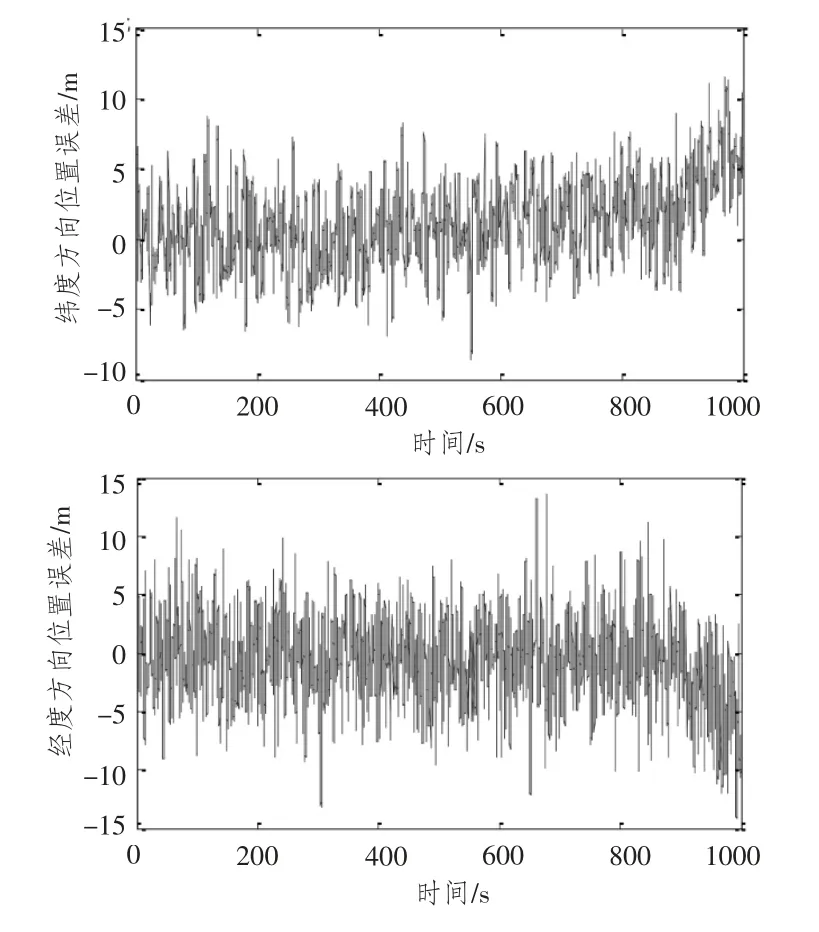
图5 卡尔曼滤波算法的位置误差曲线Fig.5 Position error curve of Kalman filtering algorithm
4 结 语
本文提出了一种基于模糊自适应改进多模型滤波的算法,可提高水下航行器组合导航系统的精度。针对观测噪声,设计采样窗口,在线统计滤波观测新息方差,然后应用协方差匹配技术设计模糊推理方法,在线调整传感器观测噪声协方差矩阵。仿真结果表明所提方法可增强估计算法的抗干扰能力,提高了估计精度。
[1]LI Kang-hua,WANG Jin-ling,LI Wan-li,et al.A noval INS and doppler sensors calibration method for long range underwater vehicle navigation[J].Sensors,2013,13(14):583-600.
[2]HAO Yan-ling,MU Hong-wei.Application of integrated alignment in AUV based on GP-SRCDKF[J].Advances in Information Sciences and Service Sciences,2012,4(21):598-605.
[3]LOEBIS D,SUTTON B,CHUDLEY J,et al.Adaptive tuning of a Kalman filter via fuzzy logic for an intelligent AUV navigation System[J].Control Engineering Practice,2004,12(12):1531-1539.
[4]ZHU Feng-chun,JU Yan-bing,WANG Ai-hua.Research on integrated navigation technology of field robot[C].2006 IEEE International Conference on Information Acquisition,2006:59-64.
[5]王其,徐晓苏,张涛,等.模糊自适应滤波在水下航行器组合导航系统中的应用[J].中国惯性技术学报,2008,16(3):320-325.
[6]KIM H S,KIM I H.Design of adaptive fuzzy IMM algorithm for tracking the maneuvering target with time-varying measurement noise[J].International Journal of Control,Automation,and Systems,2007,5(3):307-316.
[7]LI Wen-ling,JIA Ying-min.Consensus-based distributed multiple model UKF for jump markov nonlinear systems[J].IEEE Transactions on Automatic Control,2012,57(1):230-236.
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
北京航空航天大学学报(2021年7期)2021-08-13
中学生数理化·八年级物理人教版(2020年11期)2020-12-14
计算机应用与软件(2019年2期)2019-04-01
电子制作(2019年23期)2019-02-23
经济研究导刊(2018年19期)2018-07-24
雷达学报(2017年3期)2018-01-19
北京航空航天大学学报(2017年9期)2017-12-18
百科探秘·航空航天(2016年9期)2016-12-01
考试周刊(2016年54期)2016-07-18
