
自升式抛石整平平台站立状态总体性能分析
2014-12-04 09:29蒋秋申李丽红李卫华
船舶设计通讯 2014年2期
吴 靓 蒋秋申 李丽红 李卫华
(上海船舶研究设计院,上海201203)
0 前言
“津平1号”是我国第一艘首次成型的带桩腿提升自升平台的高精度深水抛石整平船,为港珠澳大桥工程量身定制,进行沉管隧道基础施工,负责铺设水深10~40 m范围内所有沉管关节(包括EPS)的碎石垫层。在不移动船身的情况下,碎石铺设整平作业范围可达48 m×25 m。
对于自升式平台,站立状态下总体性能分析是平台作业的重要基础[1],主要包括:桩腿强度,平台抗倾覆稳性,锁紧装置能力及桩腿最大支反力。其计算方法依据为中国船舶检验局《海上移动平台安全规则(1992)》和中国船级社《海上移动平台入级与建造规范(2005)》。
1 总体布置及结构形式
抛石整平平台(以下简称“平台”)的主要功能为抛石整平。其设置有:抬升系统、锁紧系统、石料传送系统、大车、小车、抛石管及其控制系统、测量系统、定位锚绞车和系泊绞车等设备。顶甲板四角布置有4根采用齿轮齿条形式驱动的圆柱形桩腿;中间月池上部设置1台纵向移动的大车,大车上设置带有抛石管的小车,小车可以沿大车横梁横向移动。船上还配置了供给料皮带机、柴油发电机组、压舱注排水系统等各种辅助设备。
平台船体分为主船体和上层建筑两部分。两者均呈75.8 m×46 m(垂线间长×型宽)的“回”字形。主船体型深5.5 m,分布有压载舱、泵舱、海水缓冲舱、燃油舱、淡水舱、污水舱及辅机舱等;上层建筑在距船底12 m的顶甲板上下分别为首(尾)部甲板室与首(尾)部连接桥,分布有居住舱室、餐厅、厨房、应急发电机室、机舱集控室、机舱、机修间、CO2站室、会议室及变频驱动站等。主船体与上层建筑之间以“工”字型支柱相连接。“回”字形中间为59 m×30 m的月池开口,可供抛石管行走作业。平台总布置如图1所示。
平台工作水深最大为40 m,对沿海海区,圆柱形桩腿已足够满足使用要求。桩腿结构形式如图2所示。

图1 抛石整平平台总布置图

图2 桩腿结构图
齿轮齿条式升降装置安装在船体与桩腿的交接处,驱动升降装置使船体和桩腿作相对的上下运动。当平台处于站立状态时,锁紧装置将船体固定于桩腿某一位置,此时升降装置(锁紧装置)主要承受垂向力,水平力则由固桩装置传递。船体与桩腿的连接及各部件作用如图3与表1所示。

图3 船体与桩腿连接示意图

表1 船体与桩腿的连接及各部件作用
2 有限元模型
平台站立状态的总体性能分析使用了SACS软件。该软件是广泛用于海洋平台及一般陆地结构工程设计的结构有限元分析软件,为各船级社所认可。
平台除了承受自身固定重量和可变载荷外,还受到环境载荷(风、浪、流)的影响,以及平台水平位移引起的P-Delta效应和惯性运动引起的动态响应幅值载荷。桩腿围阱区域是自升式平台的主要受力区域,承受及传递船体与桩腿之间的弯矩和剪力。在总体性能分析中,模拟船体与桩腿连接的力学模型十分重要。
为更真实模拟平台受力情况,在SACS中分别对主船体与上层建筑用梁单元建模,并正确描述船体的刚度,两者之间以真实的“工”字型支柱连接。桩腿以圆管型式的梁单元模拟,如图4所示。
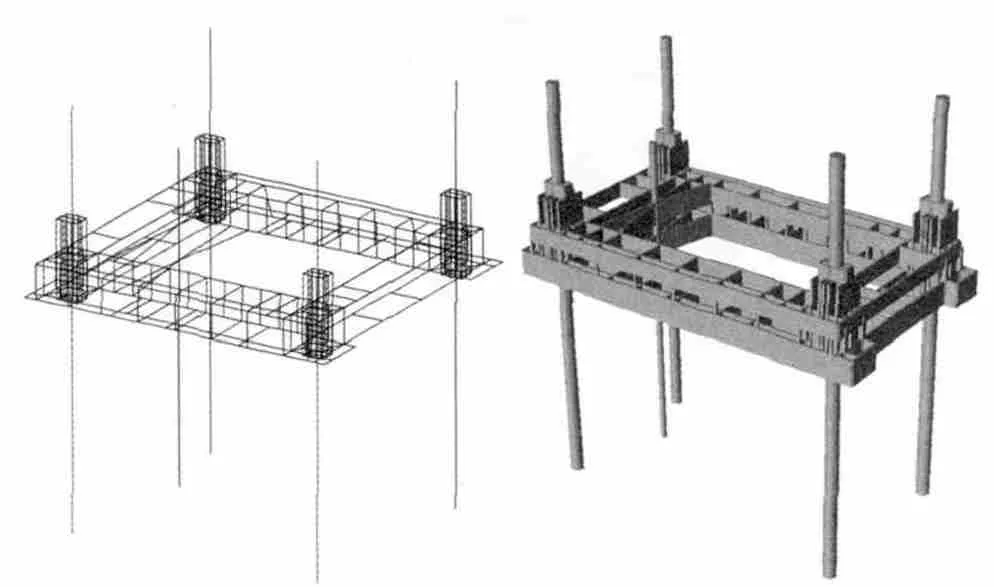
图4 全船有限元模型
在仿真模型中,选取顶部横向限位块、中部纵横向导向块、锁紧装置、主甲板横向限位块、底部纵横向导向块模拟连接站立状态下的船体与桩腿,以等效梁单元模拟,并赋予适当约束。
平台桩腿采用插桩形式,根据CCS的规定,插桩式自升式平台一般以泥面下3 m处为铰接点。
3 计算过程[2-3]
3.1 设计环境条件
平台的站立状态分为风暴自存工况和正常作业工况,环境条件如表2所示。
3.2 船体自重
船体的自重包括固定载荷(指永久固定在平台上并构成平台一部分的设施)与可变载荷(指作业期间需要移动或消耗的物品),以线载荷的方式分别添加在模拟主船体与上层建筑的梁单元上,并真实模拟最危险的重心位置。
3.3 风载荷
风载荷在平台的强度计算中扮演了非常重要的角色。根据规范和规格书的要求,需考虑两种不同的风速:100 kn(即 51.5 m/s,风暴自存工况),50 kn(25.8 m/s,正常作业工况)。此处风载荷的计算参照SNAME规范提供的经验公式。
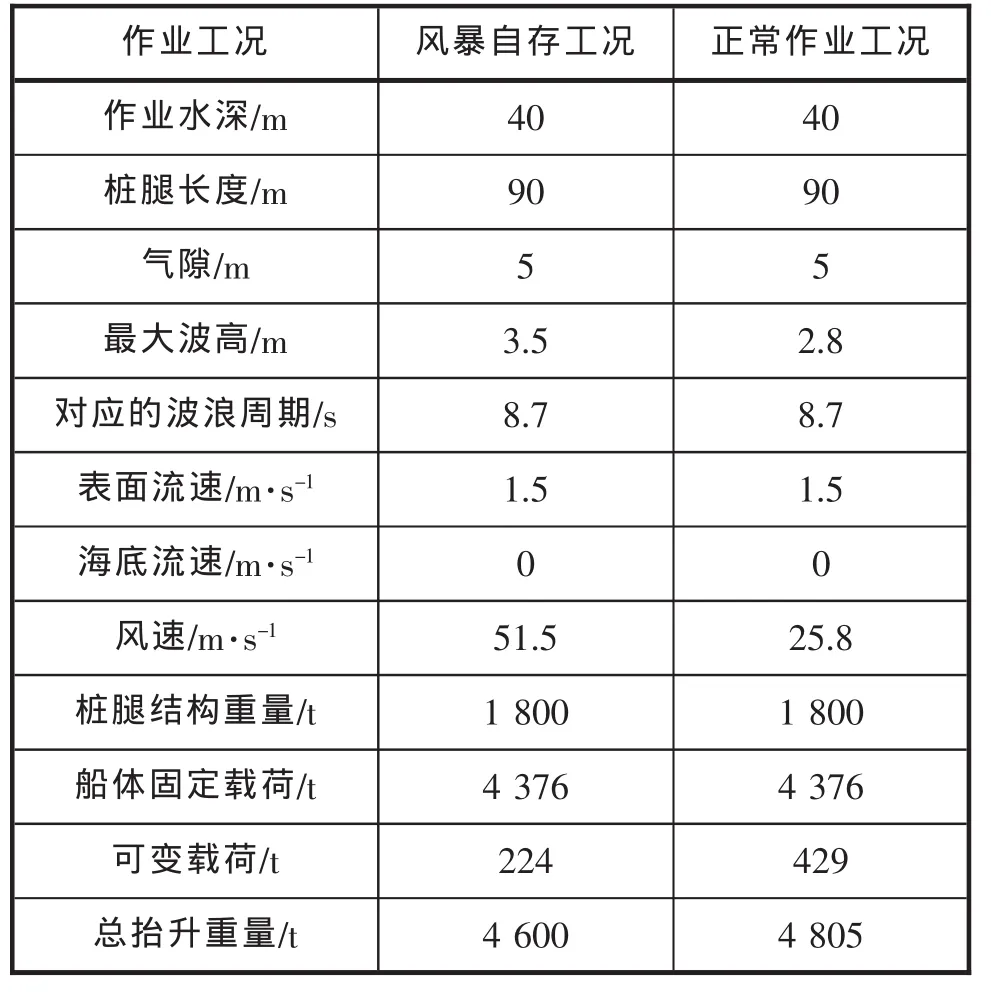
表2 环境条件参数表
3.4 波浪与海流载荷
作用在桩腿上的由波浪和海流引起的水动力载荷可以通过MORISON公式求解:

式中:△F——单元长度上的水动力载荷;
△Fdrag——单元长度上的拖曳力;
△Finertia——单元长度上的惯性力;
ρ——海水密度;
D——构件直径;
CD——拖曳力系数;
ux——标准单元波浪粒子的速度;
CM——惯性力系数;
u˙x——标准单元波浪粒子的加速度
其中波浪水质点运动由Stokes五阶波浪理论求解;而起决定作用的CD和CM根据SNAME规范提供的经验公式计算。SACS自带的浪、流载荷计算功能大大简化了计算过程。
3.5 动态响应幅值载荷
本分析中考虑了由波浪引起的船体动态响应。根据规范要求,对自升式平台可以采用经典单自由度(SDOF)法估算动态响应幅值载荷。计算公式:

式中:KBSDAF——动态响应系数;
Tn——平台摇摆运动的自然周期;
T——平台遭遇的波浪的周期;
ζ——阻尼系数;
Finertia——动态响应力;
Moverturning——动态响应弯矩;
Fwavemax——波浪力的最大值;
Fwavemin——波浪力的最小值;
hG——平台重心高度
3.6 P-Delta效应
施加以上载荷后,平台将发生水平位移,由此产生的二次弯矩即为P-Delta载荷。
海床作用力垂向分量不通过平台重心,会导致线性近似静态理论计算结果产生偏差。船体重心的偏移会增大倾覆力矩,导致背风桩腿轴向载荷增加,迎风桩腿轴向载荷减小,同时,背风桩腿下导轨弯矩减小,迎风桩腿下导轨弯矩增加。
4 平台站立状态总体性能分析[2-3]
4.1 桩腿强度校核
SACS软件内置多种规范,可以直接对桩腿强度进行规范校核,并给出桩腿的效用因子。当效用因子小于1时,桩腿的整体屈服和屈曲强度均满足规范要求,如表3所示。
4.2 平台抗倾覆稳性分析
抗倾覆稳性是指自升式平台在站立状态下,其自身的重力产生的抗倾覆力矩足以抵抗由风、浪和流等外部环境载荷作用产生的引起平台倾覆的倾覆力矩。该指标为校核平台站立安全性的重要指标之一。据规范,校核平台站立状态的抗倾覆稳性参照以下横准:

式中:KSF——抗倾安全系数
平台的KSF分别取:风暴自存工况下,1.3;正常作业工况下,1.5。表4给出了平台的抗倾覆能力。Mwave¤t表示波浪和海流对平台产生的弯矩;Mwind表示海风对平台产生的弯矩;Minertia表示平台动态响应幅值弯矩;MP-Delta表示平台因P-Delta效应产生的弯矩;Mq表示平台倾覆力矩;Arm表示平台抗倾覆力矩的力臂;Mk表示平台抗倾覆力矩。
4.3 锁紧装置能力校核
平台的锁紧装置承受全部的垂向载荷和绝大部分的弯矩载荷,是平台在站立状态下最重要的受力机构。表5给出了平台的锁紧装置能力。
4.4 桩腿最大支反力分析
桩腿支反力分析对全船整体分析以及桩腿设计都有重要意义,尤其对桩靴设计有指导作用。表6给出了桩腿的最大支反力。

表4 各工况下平台抗倾覆能力

表5 各工况下锁紧装置效用因子

表6 各工况下桩腿最大支反力
5 结语
本文阐述了平台总体性能分析的思路和方法,计算了平台站立状态下的几个关键总体性能,为平台的后期设计提供了数据支持,在平台的设计过程起到统领作用,其准确性至关重要。
计算过程中发现,环境载荷中风、浪、流对计算结果的影响依次减小,尤其风载荷对计算结果的影响非常大,所以前期风载荷的计算需要准确可靠。
[1]孙东昌,潘斌.海洋自升式移动平台设计与研究[M].上海:上海交通大学出版社,2008.
[2]SNAME.Guidelines for Site Specific Assessment of Mobile Jack-Up Units[S].2002.
[3]陆晟.350 ft自升式平台站立工况总体分析[J].船舶设计通讯,2010(增刊):71-75.
猜你喜欢
中国港湾建设(2022年12期)2022-12-28
中国港湾建设(2022年12期)2022-12-28
舰船科学技术(2022年20期)2022-11-28
水运工程(2020年10期)2020-11-11
中国港湾建设(2017年11期)2017-12-19
工程建设与设计(2016年2期)2016-08-22
焊接(2015年9期)2015-07-18
海军医学杂志(2015年2期)2015-02-27
中国舰船研究(2014年6期)2014-05-14
船海工程(2013年6期)2013-03-11
