分数阶系统的状态反馈控制
2014-12-03 05:04方园王先超马玉田阜阳师范学院数学与金融学院安徽阜阳236037
长江大学学报(自科版) 2014年34期
方园,王先超,马玉田 (阜阳师范学院数学与金融学院,安徽 阜阳236037)
分数阶微积分自被提出以来便被学者们广泛用于描述各类系统,分数阶系统的稳定性问题也越来越受到学者们的广泛关注[1-4]。下面,笔者主要针对带Riemann-Liouville导数的分数阶系统,讨论了状态反馈控制问题。
1 预备知识及问题描述
定义1 若α(n-1<α<n),函数ft()的Riemann-Liouvill导数定义如下:

考虑带Riemann-Liouvill导数的线性分数阶系统:

定理1[3]若矩阵A中所有特征值满足则系统所有零解是渐近稳定的。
引理1[4]分数阶系统(2)渐近稳定的条件是当且仅当存在2个实对称矩阵Pk1∈Rn×n(k=1,2)和2个反对称矩阵Pk2∈Rn×n(k=1,2),使得:
引理2[5]若系统(2)中矩阵A∈Rn×n,且1≤α<2,则成立当且仅当存在对称矩阵P>0使得:

引理3[6]假设X、Y为适当维数的矩阵,则成立不等式:

2 主要结果
考虑带R-L导数的分数阶系统:

式中,x(t)∈Rn为系统状态;u(t)是系统的输入;常数矩阵A∈Rn×n,B∈Rn×m,且矩阵A不满足为初始状态。
考虑反馈控制器u(t)=Kx(t),带入系统(3)中可得:

2.1 0<α<1
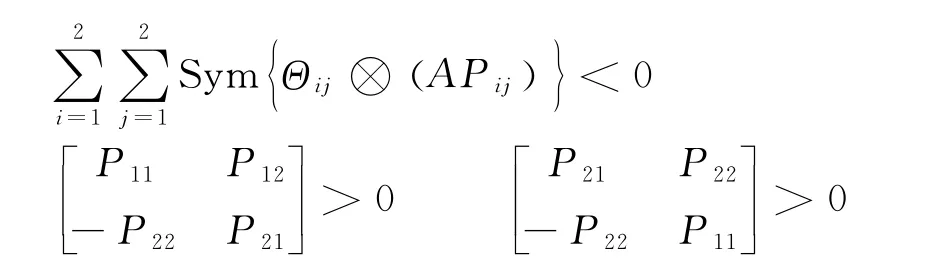
定理2 若存在正定矩阵P11,P21,常数矩阵K,实数εi>0(i=1,2),使得矩阵:
则带R-L导数的分数阶系统(4)是渐近稳定的。
证明 利用引理1可知,存在2个正定矩阵Pk1∈Rn×n,k=1,2。 反对称矩阵Pk2∈Rn×n,k=1,2。使得假设P12=P22=0,此时可以得出当满足条件时,系统(4)是渐近稳定的。其中不等式Φ<0等价于:

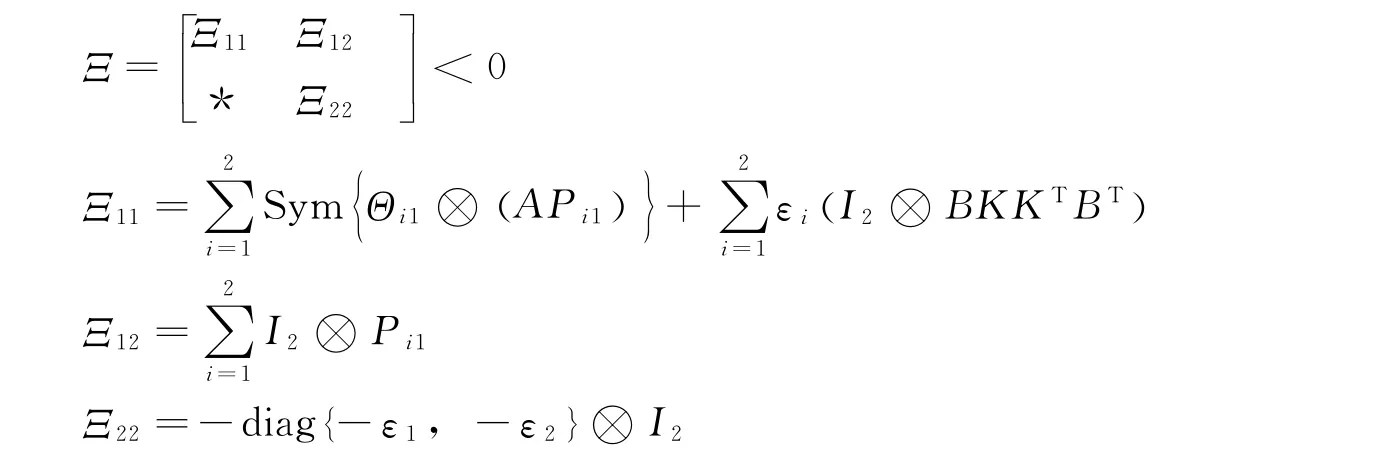
记Θi1Θi1=I,并利用引理3可知:对于任意实数εi>0(i=1,2),有:

再利用矩阵Kronecker product性质,有:

最后由矩阵的Schur补性质,式(5)、(6)、(7)等价于Ξ<0。
2.2 1≤α<2
定理3 存在正定矩阵P,常数矩阵K 和常量ε>0,使得(线性矩阵不等式(LMI)):
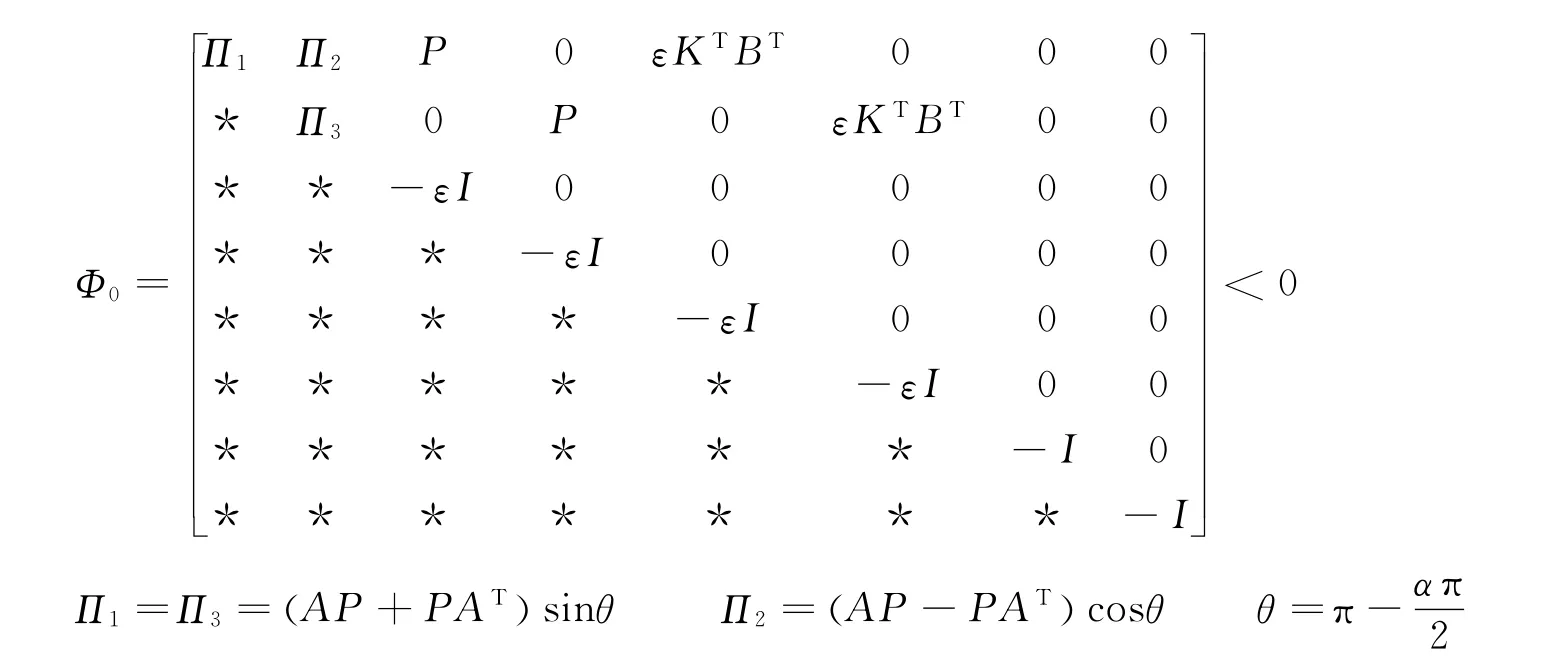
证明 由引理2可知,当下列条件满足时,系统(4)是渐近稳定的。

再利用引理3可得,式(8)中第2部分可以作如下分解:
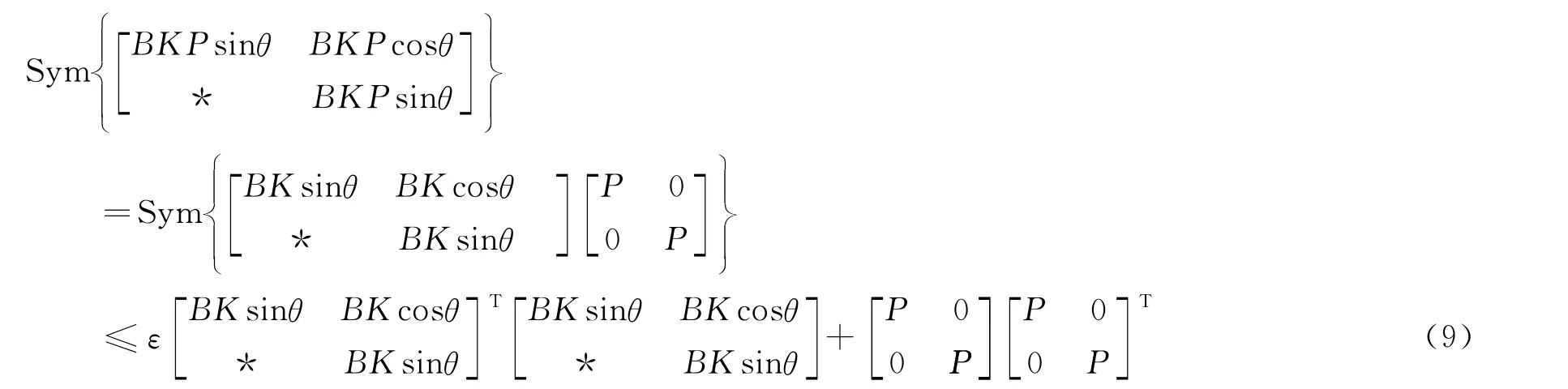
将式(9)带入式(8)中,并利用Schur补引理,可得线性矩阵不等式Φ0。证毕。
3 结语
针对阶数α的2种情况,分别用不同的方法得到系统稳定的条件。下一步可考虑系统中含有时滞情况,进一步讨论系统的稳定性条件。
[1] 方园,蒋威 .一类分数阶时滞系统的输出反馈镇定 [J].信息与控制,2013,42(1):33-38.
[2] 方园 .分数阶时滞系统的稳定性 [J].阜阳师范学院学报(自然科学版),2012,29(3):11-13.
[3] Qian D L,Li C P,Afarwal R P,et al.Stability analysis of fractional differential system with Riemann-Liouville derivative [J].Mathematical and Computer Modelling,2010,52:862-874.
[4] Lan Y H,Zhou Y.LMI-based robust control of fractional-order uncertain linear systems [J].Computers and Mathematics with Applications,2011,62:1460-1471.
[5] Chilali M,Gahinet P,Apkarian P.Robust pole placement in LMI regions [J].IEEE Transtctions on Automatic Control,1999,44(12):2257-2270.
[6] Chai L,Fei S M,Xin Y B.A new type of adaptive control for time-delay systems with input delay[J].Journal of systems science and Mathematical Sciences,2008,28(12):1535-1544.
猜你喜欢
数学年刊A辑(中文版)(2021年1期)2021-06-09
阜阳师范大学学报(社会科学版)(2021年1期)2021-03-30
数学物理学报(2020年5期)2020-11-26
自动化学报(2019年6期)2019-07-23
城市道桥与防洪(2019年5期)2019-06-26
北方工业大学学报(2019年5期)2019-03-30
今日农业(2019年13期)2019-01-03
铁道通信信号(2016年9期)2016-06-01
新高考·高一物理(2016年3期)2016-05-18
应用数学与计算数学学报(2014年3期)2014-09-26