起跑器抵脚板水平旋转角度对短跑运动员起跑蹬伸力的前导性研究
2014-12-03 08:11刘海斌夏培玲元文学孟昭莉
中国体育科技 2014年1期
刘海斌,夏培玲,元文学,孟昭莉
短距离赛跑如100m、200m和400m跑,由于比赛时间较短,对运动员来说,千分之一秒都显得尤为重要[8]。因此,有效的起跑是取得比赛成功的关键因素之一[11]。蹲踞式起跑是国际上先进主流的短距离起跑方式,它是完整短跑技术的起始技术,影响着后续技术的发挥以及比赛时的心理状态[5]。
《田径竞赛规则》[7]规定:“国际赛事中,所有400m 跑或以下的起跑径赛项目,必须采用蹲踞式起跑及起跑器”。2008年,孙亮[4]就起跑器后抵脚板不同倾斜度对起跑速度的影响研究后认为,后抵脚板最佳倾斜度为30°~50°,后蹬腿踝关节角度是确定后抵脚板倾斜度的必要因素。2010年,司文等[2]将三维测力传感器安装在起跑器抵脚板上,对起跑器距离和倾斜角度研究得出:运动员在获得较大向前动量时,起跑完成动作时间和保持平衡的力也相应增加。但选择起跑器位置要综合考虑时间和力两者之间的关系,过分追求最大受力反而不利于跑出最佳成绩。
多 年 来 ,围 绕 起 跑 器 设 置 的 争 论 一 直 没 有 停 止[1,2,4]。多数讨论起跑与起跑器关系的文献都围绕着起跑器长度和倾斜度对运动员起跑速度的影响[4,18,22]。
起跑器限制有效起跑的因素有4个:1)两抵脚板前、后距离;2)抵脚板与地面倾斜角度;3)两抵脚板之间宽度;4)抵脚板水平旋转角度。目前,径赛较多使用的起跑器可调节第1和第2个因素,固定第3和第4个因素。为使运动员从起跑器限定因素中解放出来,1992年,Guissard[10]设计了一款带有内旋角度的三角形起跑器(Gill Athletics),但由于其安装的不稳定性而没有被推广和使用。
现有起跑器设计结构已严重影响运动员高水平发挥,更不利于短距离赛跑世界纪录的再次刷新[11]。因此,本次研究目的为探讨起跑器前、后抵脚板水平旋转角度是否会对运动员起跑蹬伸力产生积极影响。根据研究目的,提出2个实验假设:1)起跑器前、后抵脚板水平旋转角度对蹬伸力没有改变;2)起跑器前、后抵脚板水平旋转角度的主观调整与固定调整对起跑蹬伸力没有差异。
1 研究对象与方法
1.1 研究对象
大学高水平短跑运动员8名,均为男性(年龄20.94±2.23岁,身高179.13±3.14cm,体重179.13±3.14kg)。实验前,就实验目的和内容进行了相关培训,并签订志愿参加,无报酬实验协议。
1.2 实验仪器与场地设置
实验采用两台压电式三维测力平台[6](型号:YDT4060-2;尺寸:40×60cm;采样频率:800Hz;大连理工大学研制)。两台测力平台并排水平摆放(图1A标号b1,b2),两支抵脚板(图1A标号c1,c2)通过钢板(图2A)分别固定于两测力平台(实物图1B)。起跑器长度(图1A标号1),起跑器宽度(图1A标号2),起跑器倾斜度(图1D标号3),起跑器旋转角度设置见2.5实验设计部分。
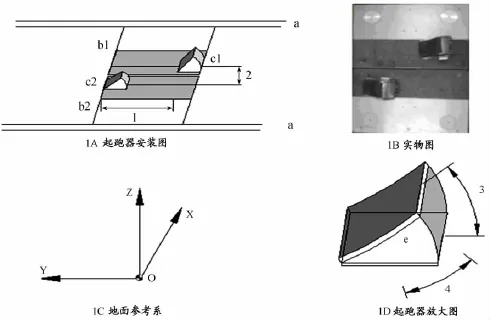
图1 本研究起跑器安装与场地设置示意图Figure 1. Starting Block and Experiment Setting
1.3 概念界定
起跑器一般由一个铝合金支架和两支可调节抵脚板组成,通常起跑器设置为两抵脚板前、后各一支。
起跑器长度:两抵脚板前、后距离(图1A标号1)。起跑器宽度:两抵脚板左、右宽度(图1A标号2)。起跑器倾斜度:抵脚板在坐标系YZ平面(图1C)内绕X轴旋转角度(图1D标号3)。
起跑器旋转角度:抵脚板在坐标系XY平面(图1C)内绕Z轴旋转角度(图1D标号4)。
1.4 起跑器改造
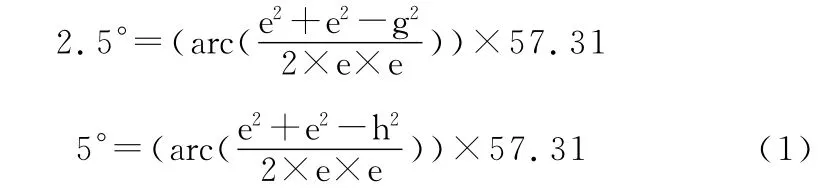
通过一块长60cm、宽16.5cm、厚0.5cm的钢板将测力平台将起跑器抵脚板连接起来(图2A)。方法:首先,在钢板上钻4个罗眼(图2A标号d)。通过这4个罗眼将钢板固定于测力台;然后,在抵脚板底座钻2个罗眼(图2B标号c和f),通过c和f完成起跑器与钢板的连接。利用车床在图2B的f处加工出一从c圆心到f圆心半径为10 cm的半圆弧;最后,采用起跑器底座罗眼c固定,外旋f的方法实现起跑器水平旋转。根据三角公式(1)可得出:
已知等腰三角形两腰:e=e=10cm和一边:g=0.437 cm或h=0.813cm:
2A固定于测力平台的钢板上(1号测力台):
图2 本研究起跑器固定装置与起跑器旋转角度设置示意图Figure 2. Starting Block Fixing and Rotation Design
因为使用量角器测量起跑器旋转2.5°和5°比较困难。所以,通过图2B中的c固定,借助于高精度游标卡尺,调节图2B中f就比较容易了,外旋2.5°,g=0.437cm;外旋5°,h=0.813cm。
1.5 实验设计
要求每名运动员按照个人习惯对起跑器长度和倾斜度进行调节设置,设置后实验过程中不做改变。实验只对起跑器旋转角度进行控制,设定4种条件:
条件1:两支起跑器旋转角度0°(图2B),即常规起跑方式,起跑4次;
条件2:两支起跑器旋转角度2.5°(图2C),起跑4次;
条件3:两支起跑器旋转角度5°(图2D),起跑4次;
条件4:运动员根据前3种起跑器旋转角度主观体验,对两支抵脚板旋转角度分别进行个性化调整后,起跑4次(表1,每名运动员的主观最佳旋转角度)。
1.6 数据处理与统计
为消除体重对蹬伸力的影响,待运动员起跑姿势稳定后对测力平台0点漂定处理,而后测试所得数据为运动员去体重后的实际蹬伸力。所得力学数据均除以本人身高,单位:N/m。对一个完整起跑器蹬离过程进行标准化处理,0%为蹬伸开始时相,100%为蹬伸结束时相。
采用SPSS 17.0(美国)对所得数据进行统计学处理。第1个实验假设验证采用一般线性模型重复度量方差分析(one-way repeated-measures ANOVA),统 计 学 显 著 P=0.05水平。方差分析后,3种旋转角度(0°,2.5°和5°)采用简单比较(Simple Contrasts):级别1为“0°旋转角度”;级别2为“2.5°旋转角度”;级别3为“5°旋转角度”,统计学显著水平P=0.05。第2个实验假设验证采用配对t检验(Paired t Test),比较“0°旋转角度”与“最佳旋转角度”,统计学显著水平P=0.05。
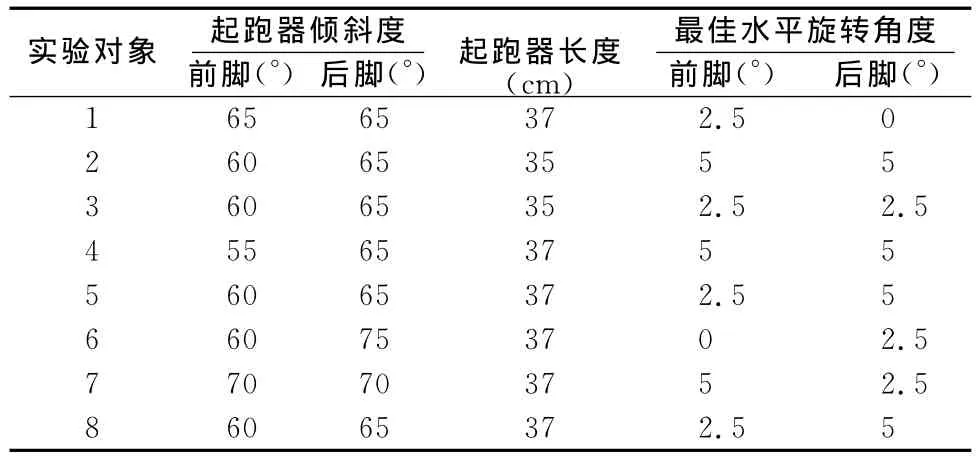
表1 本研究实验测试基本参数一览表Table 1 Basic Parameters for Sprint Starting
2 结果
2.1 前抵脚板力学特征比较与分析
图2显示,前脚抵脚板3种旋转角度在3个方向的地面反作用力总体趋势基本一致。表2显示,带有水平旋转角度的前抵脚板在X、Y和Z方向均增大了0°转角时的峰值;2.5°与5°转角均提前了0°转角峰值时相,最佳转角延后了0°转角峰值时相。
X方向检验1:3种转角峰值之间呈显著性差异F(2,29)=3.367,P<0.05。差异由 0°与5°转角产生(P<0.05)。3 种 转 角 时 相 之 间 没 有 显 著 性 差 异 F(2,29)=2.744,P>0.05。检验2:0°与最佳转角峰值之间呈非常显著性差异t(31)=3.502,P<0.05。峰值出现时相没有显著性差异t(31)=1.232,P>0.05。
Y方向检验1:3种转角峰值之间没有显著性差异F(2,29)=0.778,P>0.05。3种转角时相之间没有显著性差异F(2,29)=0.429,P>0.05;检验2:0°与最佳转角峰值之间没有显著性差异t(31)=1.196,P>0.05。峰值出现时相没有显著性差异t(31)=0.935,P>0.05。
Z方向检验1:3种转角峰值之间没有显著性差异F(2,29)=0.345,P>0.05。3种转角时相之间没有显著性差异F(2,29)=0.194,P>0.05;检验2:0°转角与最佳转角峰值之间没有显著性差异t(31)=0.658,P>0.05。峰值出现时相没有显著性差异t(31)=0.812,P>0.05。
2.2 后抵脚板力学特征比较与分析
图3显示,后脚抵脚板3种水平旋转角度在3个方向的地面反作用力总体趋势基本一致。从表2可以明显看出,带有水平旋转角度的后抵脚板在X方向上均减小了0°转角时波峰数值,而Y和Z方向均增大了0°转角时峰值;2.5°、5°和最佳转角在 X 和Y 方向上提前了0°峰值时相,在Z方向延后了0°峰值时相。
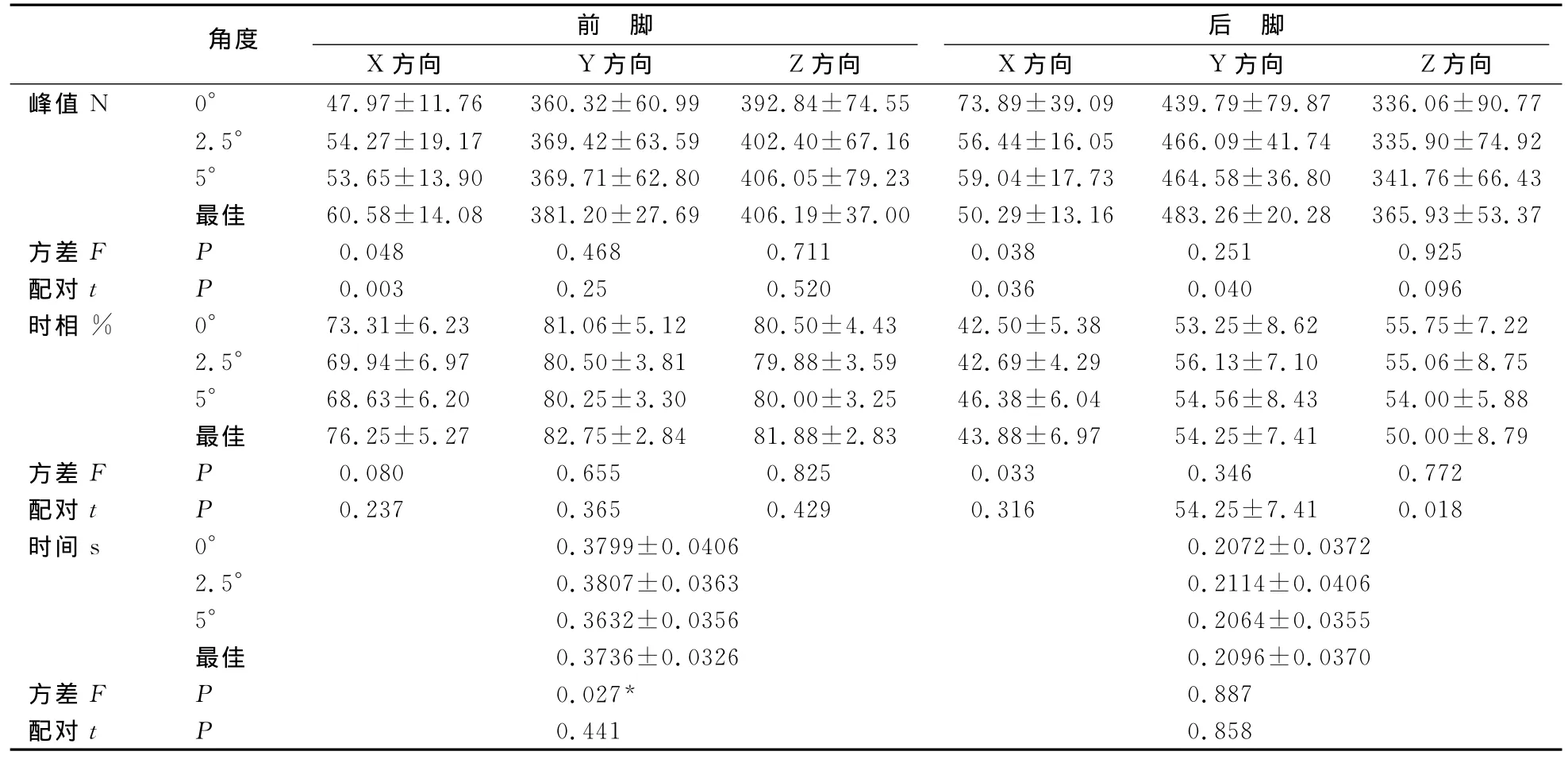
表2 本研究前、后抵脚板不同旋转角度相关指标一览表Table 1 Parameters for Starting Block with Different Rotational Angle
X方向检验1:3种转角峰值之间呈显著性差异F(2,29)=3.650,P<0.05。差异由0°与2.5°转角产生(P<0.05)。3种转角时相之间呈显著性差 异 F(2,29)=3.842,P<0.05。差异由0°与5°转角产生(P<0.05)。检验2:0°与最佳转角的峰值之间呈非常显著性差异t(31)=2.303,P<0.05。峰值出现时相没有显著性差异t(31)=1.037,P=0.316>0.05。
Y方向检验1:3种转角峰值之间没有显著性差异F(2,29)=1.45,P>0.05。3种转角时相之间没有显著性差异F(2,29)=1.099,P>0.05;检验2:0°与最佳转角的峰值之间呈显著性差异t(31)=2.243,P<0.05。峰值出现时相没有显著性差异t(31)=0.391,P>0.05。
Z方向检验1:3种转角峰值之间没有显著性差异F(2,29)=0.078,P>0.05。3种转角时相之间没有显著性差异F(2,29)=0.261,P>0.05。检验2:0°与最佳转角的峰值之间没有显著性差异t(31)=1.776,P>0.05。峰值出现时相呈显著性差异t(31)=2.656,P<0.05。
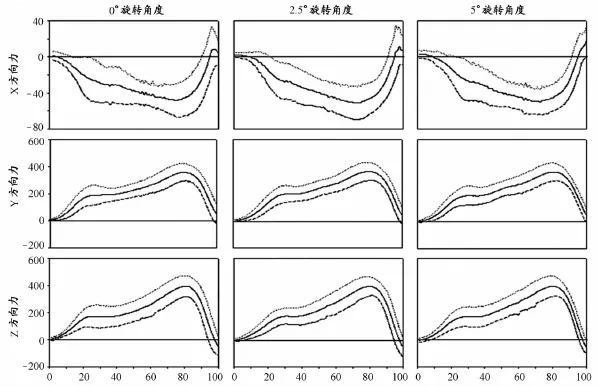
图3 本研究蹲踞式起跑蹬伸时起跑器对前腿反作用力示意图Figure 3. Force of Reaction Sprint Block on Fore Leg
2.3 起跑蹬伸时间
表2显示,前脚在0°转角时蹬伸时间为0.3799±0.0406s,2.5°转角延长了蹬伸时间,而5°与最佳转角均减少了蹬伸时间。检验1:3种转角之间呈显著性差异F(2,29)=3.849,P<0.05。差异由 0°与5°转角产 生(P<0.05);检验2:0°与最佳转角之间没有显著性差异t(31)=0.782,P>0.05。
后脚在0°转角时蹬伸时间为0.2072±0.0372s,2.5°和最佳转角延长了蹬伸时间,5°转角减少了蹬伸时间。检验1:3种转角之间没有显著性差异F(2,29)=0.120,P>0.05;检验2:0°与最佳转角之间没有显著性差异t(31)=0.181,P>0.05。
2.4 运动员主观评价
8名短跑运动员在完成前3种实验控制条件测试后,进行第4种实验控制实验,要求运动员选择最适合自己起跑的抵脚板旋转角度组合测试。表1显示,没有一名运动员选择标准起跑器旋转角度(0°)。3名运动员选择前、后脚一致的旋转角度,5名运动员选择前、后脚不一致的旋转角度。
3 讨论
起跑器是为蹲踞式起跑而特别设计的助跑器材,其设计原理为牛顿第三定律,即作用力与反作用力的关系。X方向为起跑蹬伸时受到的侧向反作用力,Y方向为纵向推力,即与起跑同向的动力,Z方向为垂直力。研究表明[13],短距离起跑过程中,最大垂直力为1.86倍体重,途中跑垂直力为2.62倍体重。蹬离起跑器阶段垂直力大就会延长腾空时间,进而影响身体重心加速。本研究结果显示,运动员后腿蹬离起跑器时,纵向力峰值比垂直力峰值大30.87%,前腿蹬离起跑器时,纵向力峰值比垂直力峰值小8.31%。也就是说,由后腿向前腿过渡的过程中,随身体重心提升,垂直力已开始逐渐占据主导地位。

图4 本研究蹲踞式起跑蹬伸时起跑器对后腿反作用力示意图Figure 4. Force of Reaction Sprint Block on Behind Leg
通常认为,人体要获得向前加速就需要地面反作用力越向前越好[16]。然而,在身体姿势一定的情况下,要改变力方向就要通过身体环节的非对称角速度来实现[15],并伴随整个身体角动量的改变[16]。如要短时间内获得身体角动量的增加就需要其脱离起跑器后通过加大步宽,最大限度增加侧向蹬伸力,平滑提高身体重心位移的办法[12,13]。本研究结果显示,带旋转角度的抵脚板增加了运动员前脚侧向蹬伸力。
Ito[14]对2005年第10届世界田径锦标赛100m跑18名男性预赛运动员起跑后两脚着地长度、宽度和频率研究得出:运动员蹬离起跑器后,接触地面的第1步步宽0.39±0.07m,逐渐过渡到途中跑0.17±0.04m。运动员蹬离起跑器后,第一步着地距起跑器前抵脚板距离1.22±0.16m。根据勾股定理,已知直角三角形邻边(0.39m,运动员脱离起跑器第一步步宽)和对角边(1.22m,运动员脱离起跑器后第一步步长)得出,蹬离起跑器后将与运动方向夹角17.72°向侧向蹬伸以踏出第一步。然而,要以邻边0.15m,即起跑器固定宽度,步长1.22m计算,该角度只有7°。由此可以推理,运动员在没有旋转角度的情况下,要获得17.72°侧向蹬伸是十分困难的。这也可以解释为什么国际大赛经常出现运动员起跑的蹬空现象。
假设100m跑比赛时间为10s,听到枪声到双脚离开起跑器用掉的时间约占整个比赛时间5%左右[11]。这个时间分为两个部分:1)运动员听到枪声到开始产生蹬起跑器的动作称为反应时间;2)开始蹬起跑器到双脚离开起跑器的蹬离时间。国际100m跑大赛中,运动员平均反应时0.164s,约占整体比赛时间1.6%[9]。本研究只记录了起跑器蹬离时间,约占到100m跑时间3.8%左右。对于以0.01s为单位的比赛项目来说,缩短运动员蹬离时间就显得尤为重要了。本研究结果,抵脚板旋转5°比旋转0°的蹬离时间缩短0.0166s,并具有显著性差异。最佳旋转角度比旋转0°的蹬离时间缩短0.0063s,这对于短距离比赛来说是具有绝对重要的意义。
时相特征分析,抵脚板水平旋转5°与2.5°没有改变起跑蹬伸过程的垂直力,纵向力和侧向力峰值出现时相,即没有改变原有抵脚板旋转0°的时相特征;力学特征分析,虽然不具有统计学的显著性差异,但抵脚板旋转5°与2.5°均增加了前脚侧向力。也就是说,带有旋转角度的抵脚板显著性增加侧向力的同时,非但没有减少垂直力和纵向力反而还使其略有增加。
工程心理学是基于人类心理能力和极限来设计仪器设备和改善环境[17]。体育比赛中,每一个细节都会影响运动员高水平的发挥。田径赛场也不例外,如比赛期间的风速、风向、空气的温度和湿度等[19]。那么,起跑器对运动员的影响就更不言而喻了,会直接影响运动员心理状态,进而影响其有效起跑。因此,起跑器设计也要考虑其使用过程对运动员心理状态的积极影响。由于起跑器抵脚板没有水平旋转角度,国际短跑比赛现场经常爆出运动员抱怨起跑器影响赛场发挥的事件,比如2012年,美国田径奥运选拔赛揭幕站,博尔特就表达了其对起跑器的强烈不满[3]。为减少运动员起跑蹬空,一些国际大赛(如近几年的世界锦标赛和奥运会)将起跑器抵脚板面积增大。但由于抵脚板与运动员前进方向夹角为90°,仍不利于运动员第一步的侧向蹬伸。
因此,本研究对第1个假设的回答:起跑器抵脚板水平角度旋转可增加运动员起跑蹬伸力,尤其是侧向力;对第2个假设的回答:运动员对起跑器最佳转角的主观调整改变了起跑蹬伸力,并增加了运动员起跑信心。但与固定转角调整(前、后转角均为2.5°或5°)相比,5°转角缩短整体蹬离时间更显著。
研究不足与未来研究方向:此次研究只探讨了起跑器设置4个因素中的一个因素,即抵脚板水平旋转角度对起跑蹬伸力的影响,对其他3个因素进行了控制。那么,起跑器两抵脚板之间的宽度因素也是限定蹬伸力的重要研究内容。另外,如果4个限定因素都开启,那么,它们之间的优化组合将会成为今后起跑器研究的重要内容。
4 结论
1.带有旋转角度的前抵脚板在X、Y和Z方向均增加了起跑蹬伸力峰值,尤其在X方向更为显著;虽然后抵脚板在X方向减小蹬伸力峰值,但其增加了Y和Z方向蹬伸力峰值,尤其是最佳转角在Y方向上增加10%的向前推力。
2.2.5 °转角几乎没有改变前、后脚蹬伸力出现时相,但5°和最佳转角改变了蹬伸力峰值出现时相。
3.5 °转角显著性地缩短蹬离时间0.0166s,最佳转角缩短蹬离时间0.0063s。
4.带有旋转角度的抵脚板有利于运动员起跑后第一步侧向蹬伸,可减少蹬伸侧滑现象,主观上会增加运动员对起跑的自信。
建议未来起跑器改进与优化应重点考虑抵脚板水平旋转角度因素。
[1]黄向东.田径[M].北京:人民体育出版社,2003:181-184.
[2]司文,严壮志,刘书朋.短跑中足底与起跑器间三维作用力研究[J].中国生物医学工程学报,2010,29(4):578-582,588.
[3]搜狐体育2012国际田联钻石联赛[EB/OL]:http://sports.sohu.com/20120608/n345063479.shtml.访问时间:2012-10-31.
[4]孙亮.蹲踞式起跑的运动解析和后起跑器[D].太原理工大学,2008.
[5]徐茂典.蹲踞式起跑动作的生物力学分析[J].体育科学研究,2008,12(3):63-65.
[6]元文学,刘海斌,孟昭莉.YDT-5462型生物力学测试系统相关参数设置与应用[C].第13届全国运动生物力学学术交流大会论文集,2009:99-100.
[7]中国田径协会.2010—2011田径竞赛规则[M].北京:人民体育出版社.
[8]BEZODIS IN,KERWIN DG,SALO AI.Lower-limb mechanics during the support phase of maximum-velocity sprint running[J].Med Sci Sports Exe,2008,(40):707-715.
[9]CIACCI S,MICHELE R,MERNI F.Kinematic analysis of the braking and propulsion phases during the support time in sprint running[J].Gait Posture,2010,31(2):209-212.
[10]GUISSARD N,HAINAUT K.EMG and mechanical changes during sprint start at different front block obliquities[J].Med Sci Sport Exe,1992,24(11):1257-1263.
[11]HARLAND M J,STEELE J R.Biomechanics of the sprint start[J].Sports Med,1997,23(1):11-20.
[12]HUNTER J P,MARSHALL R N,MCNAIR P J.Interaction of step length and step rate during sprint running[J].Med Sci Sports Exe,2004,36(2):261-271.
[13]HUNTER J P,MARSHALL R N,MCNAIR P J.Relationships between ground reaction force impulse and kinematics of sprint-running acceleration[J].J Appl Biomech,2005,21(1):31-43.
[14]ITO A,ISHIKAWA M,ISOLEHTO J.Changes in the step width,step length,and step frequency of the world’s top sprinters during a 100mrace[J].New Stud Athl,2006,21(3):35-39.
[15]JACOBS R,SCHENAU G J.Intermuscular coordination in a sprint push-off[J].J Biomech,1992,25(9):953-965.
[16]KUGLER F,JANSHEN L.Body position determines propulsive forces in accelerated running[J].J Biomech,2010,43:343-348.
[17]SANDERS M S,MCCORMICK E J.Human Factors in Engineering and Design[M].McGraw-Hill:New York,1987.
[18]SCHOT P K,KNUTZEN K M.A biomechanical analysis of 4 sprint start Positions[J].Res Q Exe Sport,1992,63(2):137-147.
[19]SHEILA A,DUGAN M D,KRISHNA P.Biomechanics and A-nalysis of Running Gait[C].Physical Medicine and Rehabilitation Clinic of North America,2005,(16):603-621.
[20]STEVENSON M.The sprint start[J].Coach Athl Director,1997:18-20.
[21]WEYAND P G,STERNLIGHT D B,BELLIZZI M J.Faster top running speeds are achieved with greater ground forces not more rapid leg movements[J].J Appl Physiol,2000,89(5):1991-1999.
[22]YASUO S,MASATO M.Relation between block spacing and forces applied to starting blocks by a sprinter[C].5thAsia-Pacific Congress on Sports Technology.Procedia Engineering,2011,(13):154-160.
猜你喜欢
中国畜牧杂志(2022年10期)2022-10-12
作文与考试·小学低年级版(2020年12期)2020-06-21
现代计算机(2020年12期)2020-06-08
农家科技(2019年7期)2019-10-08
小资CHIC!ELEGANCE(2019年20期)2019-07-02
中国建筑金属结构(2018年4期)2018-05-23
意林(2016年19期)2016-10-31
小学阅读指南·高年级版(2009年9期)2009-10-27