基于Quest 3D 的LNG 船虚拟训练系统开发
2014-11-29 01:58:56上海海事大学商船学院李志球胡以怀栾泳立
世界海运 2014年11期
上海海事大学商船学院 李志球 胡以怀 栾泳立
据2013年中国海洋工程服务及油气储运技术发展论坛预测,为满足进口LNG 海运需求,2020年后,我国LNG运输所需船队规模将扩大到60~100 艘,这将大大增加我国LNG 船员的需求量。而目前我国LNG 船员大多被派往国外接受培训,培训时间长、成本高。因此,如何在短时间培养出拥有过硬专业素质的LNG 船员,是影响中国LNG航运事业又好又快发展的一个关键因素。
实践证明,让船员到实船学习是培养LNG 船员最好的途径,但由于培训人数多、实船有定员、船期以及安全等多方面因素的限制,能够上实船学习的人非常有限。大部分学员在传统方式学习的过程中不能形成对LNG 船舶整体构造的清晰认识。LNG 船舶模拟器的使用可以提高船员培训效果,使船员熟悉工作原理、设备和操作程序,增加他们的经验和自信心,为以后在实船工作打下坚实的基础[1]。
以Quest 3D 为虚拟引擎的虚拟现实技术可用于LNG船舶模拟器的开发。虚拟现实技术具有多感知、沉浸感、交互性等优越特征,能使学员有着听觉、视觉、触觉等多种体验,达到身临其境的效果,同时交互性以及协同操作等功能可使船员对LNG 船舶操作有着更进一步的认识和了解。LNG 船舶虚拟训练系统的开发过程并不复杂,并且可以随设备的发展而更新,这样可大大减少教学和评估的成本[2]。
一、LNG 船虚拟训练系统的开发流程及总体功能设计
目前,虚拟现实软件有很多,主要包括Virtools、VR-Platform、Vega、Quest 3D 等,不同的软件应用于不同的领域。由于Quest 3D 具有成熟的DirectX 引擎,比其他虚拟现实开发软件具有更好的图形渲染效果,并且在实现交互的编程方面提供了信道(channel)这一人性化的方式,容易上手操作,因此,选择Quest 3D 作为LNG虚拟训练系统的开发平台[3]。
(一)LNG船虚拟训练系统开发流程
LNG船舶虚拟训练系统的开发过程主要包括四个阶段,其具体开发流程如图1 所示:
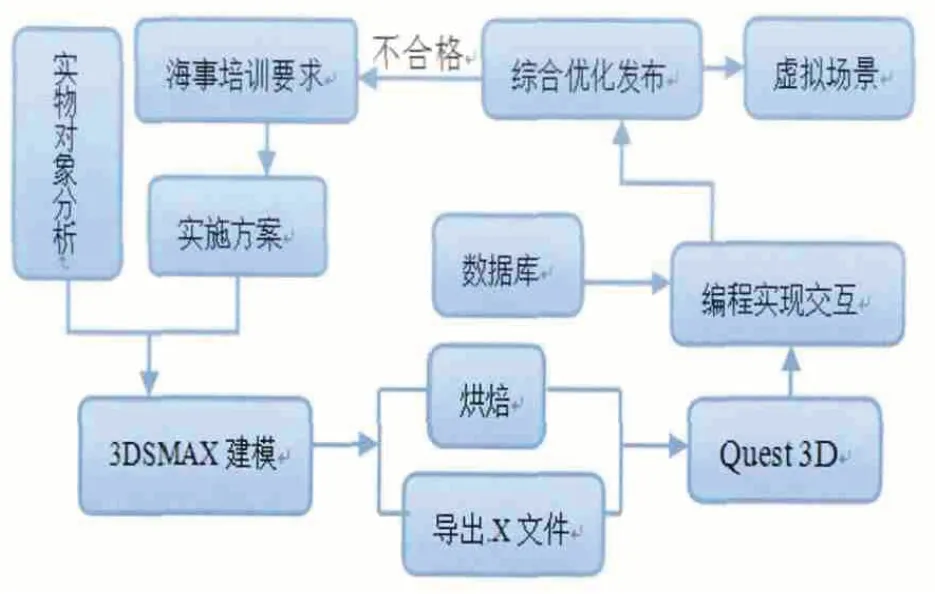
图1 开发流程图
1.前期准备阶段:在进行开发之前,基于STCW 公约以及我国主管机关规定的关于LNG 船舶模拟器相关规定制定产品方案。同时,对实船进行素材采集、分析对象外观特征以及确定对象动作真实顺序。
2.建模阶段:根据产品方案,利用3D MAX 完成三维建模和虚拟场景的构造。在建模的过程中,既要满足视觉要求即真实感,又要适当减少模型的纹理精度、细节来保证系统的运行效率。
3.Quest 3D 平台开发阶段:将模型导入到Quest 3D中,利用该软件DirectX 引擎编程优化,最终实现内部动作以及和外界的交互功能。
4.产品的发布阶段:将编好的程序发布成需要的类型,并检验是否符合海事培训要求。
(二)系统总体功能设计
LNG 船虚拟训练系统包括船舶漫游、船舶设备虚拟拆装、协同操作三方面内容。如图2 所示,系统主要功能如下:速度(Speed)、重力(Gravity Value)、相机碰撞尺寸(In: Collision Spheroid Radius)等等。漫游时,由于相机的视角会随着鼠标的光标转动,若想以固定视角观察时则很不方便,此时可以通过更改Rotation Vector 下的设置实现固定视角,在Mouse dX/dY 模块上添加一个Channel Switch,再添加一个可以控制Value 值的命令。通过改变Value 值,实现相机视角转动和固定之间的转换。系统漫游如图3 所示:
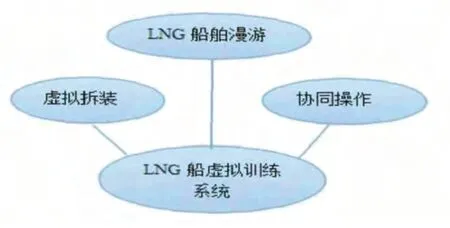
图2 系统总体功能图
LNG 船舶漫游功能:该功能能够让船员自由行走在虚拟船舶的任何位置,同时沉浸式虚拟现实设备(比如三维立体眼镜、数据手套)的使用也让船员达到身临其境的效果,这些功能促使船员更快熟悉LNG 船管道分布走向、设备的布置以及相关专业操作。
船舶设备虚拟拆装功能:该部分严格按照拆装大纲要求进行设置,使拆装过程达到规范。在选择虚拟设备拆装后,系统会自动进入拆装界面。该部分包含拆装视频演示、拆装练习和拆装评估考试等内容。如图3 所示,操作者可以根据需要选择不同的功能,同时数据库的连接可以对每一次练习和评估的成绩进行记录保存,通过查看功能可以查看操作步骤,包括正确和错误的操作。
协同操作功能:系统不仅可以单机使用,也可利用服务器实现多人在线,进行船舶不同岗位的角色选择,通过创建LNG 船舶不同情境来实现对LNG 货物操作、应急设备操作、消防演习以及机械故障的处理等多项主要船舶操作的练习和考核。培训人员可以直观地体验由于自己的操作所造成的结果或引发的事故现象,真实感相较传统训练得到了极大的增强。
二、系统开发关键问题
(一)场景漫游
场景的漫游主要是利用漫游相机实现的。可以选择1 person walkthrough camera(第一人称漫游相机)或者3 person walkthrough camera(第三人称漫游相机)。在具有角色选择时一般选择第三人称行走相机。漫游相机参数的设定是影响漫游效果的最主要的因素,因此,为了使漫游达到最舒服的状态,应注意调节一些漫游的参数,如

图3 系统漫游图
(二)虚拟拆装
1.碰撞检测
碰撞检测是系统中不可缺少的部分。要对进行场景漫游的相机设置碰撞,防止相机穿过设备。在船舶设备虚拟拆装部分,由于设备每个零件都是独立又相互关联的,当进行虚拟拆装时,受训者可以通过鼠标选取某一个零件,并按照自己的意图进行任意移动,在此过程中,每个零件都可能与场景中其他部分发生碰撞,当发生碰撞时,选取的零件应该另外选择其他路径离开,而不是发生穿透现象。因此,每个零件的拆装过程都需要考虑碰撞检测功能,使虚拟拆装过程更加逼真。
层次包围盒方法是碰撞检测中最常用的方法,主要包括球形包围盒检测法(Spheres)、坐标轴的轴向包围盒 AABB(Axis-Aligned Bounding Boxes)检 测 法、 带方向的包围盒OBB(Oriented Bounding Box)检测法、散方向多面体(K—DOP)检测法、固定方向凸包FDH(Flxed Directions Hulls)检测法等等。由于OBB 包围盒具有方向任意,能根据几何对象的形状特点紧密地包围几何对象,从而成倍地减少包围盒及基本几何元素间的相交测试,大大提高了算法的效率。因此,本系统采用该碰撞检测算法[4]。
2.拆装逻辑实现
船舶设备拆装过程需要根据规范按照一定顺序进行。在Quest 3D 中,编程进行触发条件的设定,可使拆装过程严格按照规范进行。在Quest 3D 中ChannelSwitch 模块和有限状态机(FiniteStateMachine)都可以用来实现程序的步骤化。ChannelSwitch 模块适用于拆装步骤比较少的情况,当步骤比较复杂时,该模块容易造成编程混乱,并且在后续程序更新、改进过程中不易把握。有限状态机是表示有限个状态以及在这些状态之间的转移和动作等行为的数学模型,由于它能轻松实现复杂拆装过程的编程、新步骤的添加以及后期程序升级,因此,本系统的拆装过程均采用有限状态机,可以大大提高开发速度和质量。有限状态机共有三类子连接,连接到第一个子连接的Value被检查以触发状态改变;第二个子连接代表实际的状态,只有当前状态被调用;第三个子连接可以在特定状态改变时被触发。同时,编辑界面上还有延时功能。编辑完成的编程场景如图4 所示:

图4 拆装场景
3.数据库连接
为了实现系统中操作步骤、成绩、帮助等信息的保存和查询,需要连接外部数据库。在Quest 3D 中可通过MySQL 或ODBC 两种方式创建数据库连接,MySQL 对应的是DB Driver MySQL 模块,而ODBC 对应的是DBDriver ODBC,里面封装了各自的数据库连接协议。两个模块都要连接到DB Source 信道上起作用。在利用DB Query、DBValue 和DB Text 等相关通道编辑好逻辑后,就可实现对数据的查询读取和存储[5]。
(三)网络发布
多人协同操作功能是基于网络发布而实现的。只有Quest 3D 企业版或者VR 专业版才能进行网络发布,实现多人在线协同操作以及船舶各部门虚拟操练等功能。在Quest 3D 中,主要利用Network Matrix、Network Text 、Network Value 和Network Buffer 几个模块来实现网络发布功能。它们依次控制了网络矩阵、网络文本、网络值和网络缓冲信息。这些模块主要控制网上数据传输,以确保数据正确地在客户端(clinets)与服务器(server)之间传送。服务器选用一台专业图形工作站作为服务器,上面存放LNG船舶虚拟培训系统所有的程序以及数据。服务器可以为其他客户机提供资源,客户机不需要安装Quest 3D 程序,可在登录服务器后从服务器下载虚拟场景。每一个场景中都有不同的学员进行在线协同操作,并且实时反馈场景中的状态到服务器以完成场景的同步,并最终实现场景的共同控制。
三、结语
利用LNG 船虚拟培训系统对船员和相关人员进行培训,可大大提高船员培训效率;同时该系统具有重复利用性,能减少船员培训成本。系统中的场景漫游、虚拟拆装以及协同操作等功能不仅让学员对LNG 船舶结构进行全方位的了解,更让学员对设备维护、修理以及故障排除等技能有了全新的认识。同时,对LNG 船舶货物操作、货仓管路的惰化干燥、再液化等特殊操作进行进一步的熟悉和练习,实现对LNG 船舶操纵做到融会贯通,为今后在LNG 船工作打下坚实的基础。
[1]王祎博,王建平.LNG船舶市场前景与我国LNG船员培养模式分析[J].中国水运,2011,11(11):23-26.
[2]刘向群,吴彬.虚拟现实案例教程[M].北京:中国铁道出版社,2012:5-8.
[3]王丽丽,赵晓春,任泽飞等.基于Quest3D的虚拟园林漫游系统的设计与实现[J].中国农学通报,2009,25(2):180-183.
[4]王伟,马俊.基于OBB包围盒的碰撞检测研究与应用[J].计算机仿真,2009,26(9):46-50.
[5]路朝龙.Quest3D从入门到精通[M].北京:中国铁道出版社,2012:203-228.
猜你喜欢
水上消防(2021年4期)2021-11-24 15:29:42
小哥白尼(军事科学)(2018年12期)2018-12-19 05:16:52
意林·少年版(2018年10期)2018-05-30 16:24:42
商周刊(2017年24期)2017-02-02 01:42:55
百科探秘·航空航天(2016年6期)2016-12-01 11:44:34
海外星云(2016年7期)2016-12-01 04:18:00
IT时代周刊(2015年8期)2015-11-11 05:50:37
新疆大学学报(哲学社会科学版)(2015年1期)2015-10-13 03:31:58
中国科技术语(2012年3期)2012-03-20 14:36:12
早期教育(家庭教育)(2009年9期)2009-10-20 04:28:58