基于路面动态识别的ASR仿真研究
2014-11-28 10:12张晓龙孙仁云葛恒勇原杰
湖北汽车工业学院学报 2014年4期
张晓龙,孙仁云,葛恒勇,原杰
(1.西华大学交通与汽车工程学院,四川成都610039;2.西安优耐特容器制造有限公司,陕西西安710201)
要使汽车在驱动过程中能够充分利用当前路面的附着条件,特别是在急加速时能够获得最大的驱动力,同时保持横向稳定性,需要将车轮的滑转率控制在当前路面的最佳滑转率附近,ASR系统即可实现这一功能[1]。
传统的ASR系统通常将车轮的滑转率控制在固定范围内[2],而不同路面的最佳滑转率往往不同,这样车辆在不同路面行驶时,无法充分利用当前路面的附着条件。一些高档汽车的ASR系统中设有特殊的运行模式,例如汽车行驶中冰雪路面时,驾驶员可以通过设置调整ASR系统控制的目标滑转率[3],从而充分利用路面的附着条件,但是如果汽车在行驶过程中路面突然发生跃变,驾驶员来不及设置,同时反复设置也给驾驶带来不便。
如果ASR系统能够根据当前路面状态的不同,实时调整系统控制的目标滑转率,始终将当前路面的最佳滑转率作为系统的目标滑转率,将提高系统的适应性,这就需要对当前路面进行识别。利用附着系数—滑转率曲线斜率进行路面识别的研究比较广泛[4],但是该方法需要的数据量大,实时性不强;通过模糊控制理论进行路面最佳滑转率识别也是一种重要方法[5]。文中以路面附着系数为参数指标,在实时滑转率下实现路面的动态识别,识别快速、准确,而且实现了跃变路面的识别,同时根据识别结果实时调整ASR系统的目标滑转率,确保车辆在不同路面行驶时均可按照驾驶员要求获得最大的驱动力,同时保持横向稳定。
1 轮胎模型
Kiencke等人在大量路面试验数据的基础上提出了一种实用的μ(s)(附着系数—滑转率)曲线,曲线方程如下[6]:

式中:k为μ(s)曲线斜率,一般取30;各路面的p1、p2值见表1。采用求极值的方法可以求出各路面最佳滑转率s0,见表1。
根据表1中p1、p2的值得到6种典型路面的μ(s)曲线,如图1所示。计算机仿真时利用此模型产生路面信号。
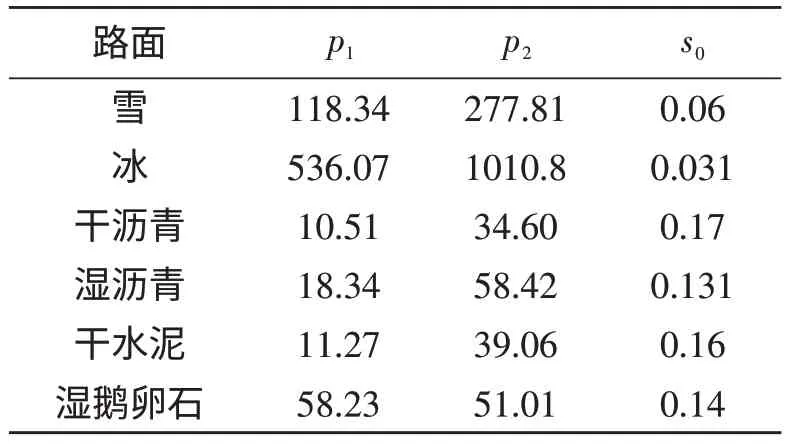
表1 轮胎模型中各典型路面参数值及s0
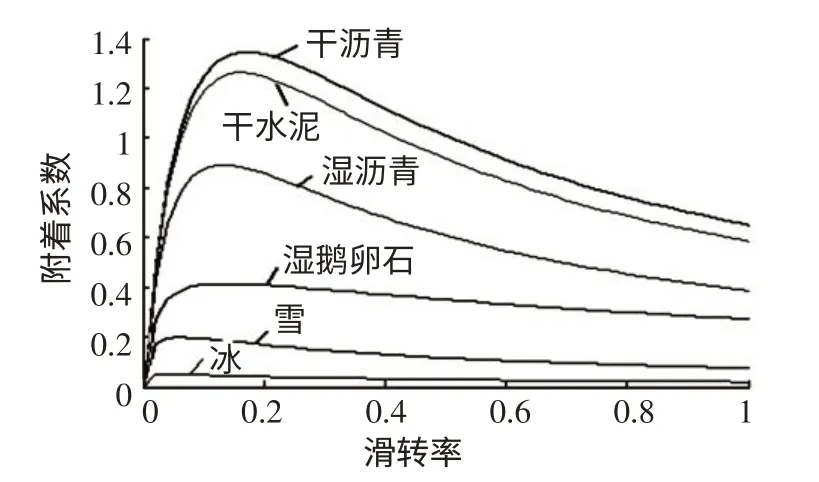
图1 6种典型路面的μ(s)曲线
2 路面状态动态识别方法
干沥青路面和干水泥路面特性相似,可合二为一,各典型路面的附着系数曲线没有出现交叉重叠,可以根据路面附着系数在实时滑转率下进行路面识别,即每一个滑转率下都有一个对应的识别区间,于是便得到了各典型路面的识别区间—滑转率曲线,如图2所示。根据动态识别区间实现实时滑转率下的路面识别[7]。一旦出现错误识别或路面发生跃变,下一时刻会立即作出调整。
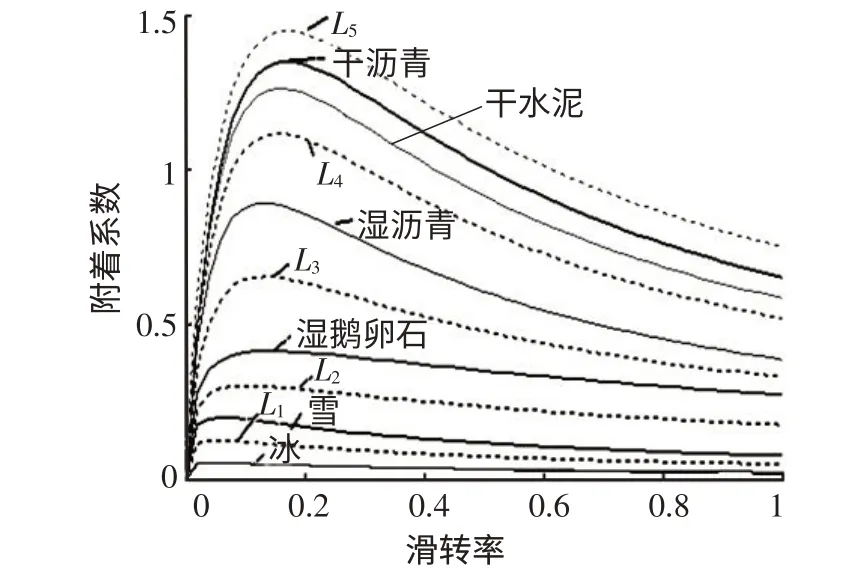
图2 6种典型路面的识别区间—滑转率曲线
2.1 建立动态识别区间
6种典型路面的识别区间随着滑转率的变化而变化,这样便得到5条识别区间曲线,如图2所示,其定义如下:
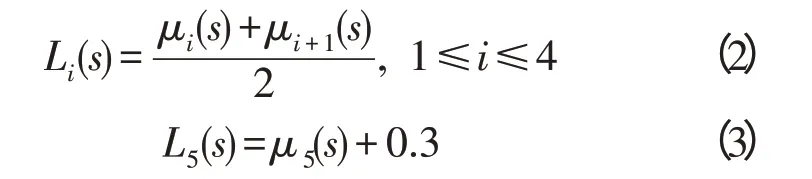
式中:μi(s)为5种典型路面的附着系数曲线;路面编号如表2所示。
由式(1)~(3)和表1中的参数值可以计算出各典型路面实时滑转率下对应的识别区间,即得到典型路面的动态识别区间,如表2所示。
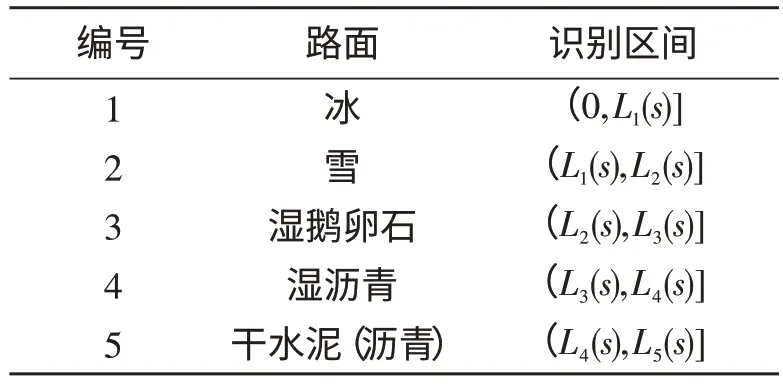
表2 典型路面动态识别区间
2.2 识别过程
考虑到汽车大部分时间行驶在干沥青(水泥)路面,将系统的目标滑转率的初始值设为0.17,即默认当前路面为干沥青(水泥)路面。车辆行驶过程中系统实时估算当前路面实时滑转率下的附着系数,同时判断其落入哪个识别区间,从而完成路面识别,同时将ASR系统的目标滑转率调整为当前路面的最佳滑转率。
3 ASR系统设计
3.1 车辆行驶状态判断
当车轮的实际滑转率小于等于当前路面的最佳滑转率时,说明驱动轮没有出现过度滑转,车辆行驶状况稳定,正在按照驾驶员的意图正常行驶,ASR系统无需工作。
当车轮的实际滑转率大于当前路面的最佳滑转率时,驱动轮出现过度滑转,车辆行驶状况不稳定,后轮驱动的汽车将可能甩尾,前轮驱动的汽车则容易方向失控,导致汽车向一侧偏移。同时可以判断出驾驶员当前的驾驶意图是要求车辆获得最大的驱动力,但是由于车轮的实际滑转率大于路面的最佳滑转率,车辆并未充分利用当前路面的附着条件,没有获得最大的驱动力。
3.2 驱动防滑控制
4 仿真试验
4.1 单轮车辆模型
为了简化问题,只考虑车辆的纵向运动,假设路面平直,忽略侧向力、空气阻力以及车轮滚动阻力的影响,采用单轮车辆模型(图3)进行分析。式(4)为整车运动方程,式(5)为车轮运动方程。
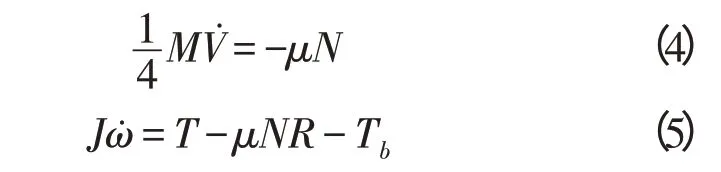
式中:M为整车质量;V为车辆的加速度;μ为路面附着系数;N是车轮轮受到来自地面的法向作用力;J为车轮的转动惯量;R为车轮的滚动半径;是车轮角减速度;Tb是车轮的制动力矩,T是车轮的驱动力矩[6]。
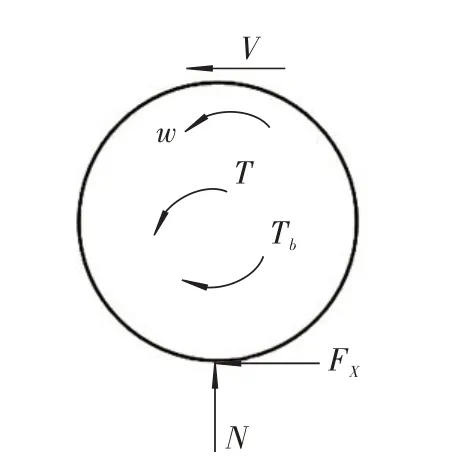
图3 单轮车辆模型
4.2 大功率起步
预设车辆在路面4(湿沥青)上大功率起步,如图4a所示,车辆开始行驶后,系统根据实时估算的附着系数,在实时滑转率下快速准确地对当前路面完成识别。
如图4b所示,车辆大功率起步时,驱动力矩过大,ASR系统将当前路面的最佳滑转率作为系统实时控制的目标滑转率,1 s 前车轮的实时滑转率基本保持在当前路面最佳滑转率,控制效果良好,1 s后由于轮速的迅速增大,驱动力矩减小,车轮的实时滑转率小于最佳滑转率,ASR系统停止工作,整个过程中,车轮没有出现过度滑转,车辆能够保持横向稳定;无ASR系统作用时,由于驱动力矩过大,车轮的实际滑转率明显大于路面的最佳滑转率,车辆横向稳定性差。
如图4c所示,在ASR系统作用过程中,路面的附着系数明显增大,基本保持在当前路面的峰值附着系数,充分利用了当前路面的附着条件,确保车辆获得最大的驱动力,满足驾驶员的要求。结合图4d~4 e可以看出,在ASR系统的作用下,车辆的起步加速能力明显提升,相等时间内获得速度更大,行驶的路程更长。
综上所述,当车辆大功率起步时,基于路面识别的ASR系统能够使车轮的滑转率基本保持在当前路面的最佳滑转率,在保证车辆横向稳定的同时,使车辆按照驾驶员要求获得最大的驱动力。
4.3 跃变路面持续加速
预设车辆在路面5(干沥青)上起步后持续加速行驶,1s 后路面跃变为路面4(湿沥青),如图5a所示,系统对跃变路面的识别快速准确。如图5b所示,整个加速过程中,在ASR系统作用下,车轮的实际滑转率基本保持在当前路面的最佳滑转率,控制效果良好,同时能够保持横向稳定。结合图
当车轮的滑转率大于当前路面的最佳滑转率时,说明车轮的驱动力矩过大,要使车辆的实际滑转率保持在当前路面的最佳滑转率,需要减小车轮的驱动力矩,此时可以给车轮增加一个制动力矩同时以当前路面的最佳滑转率作为ASR系统控制的目标滑转率,通过调整制动力矩Tb的大小,确保车轮的实际滑转率在驱动力矩过大时仍能保持在当前路面的最佳滑转率,车辆能够按照驾驶员的要求获得最大的驱动力,同时保持横向稳定。5 c可以看出,车辆在不同路面加速时附着系数基本保持在当前路面的峰值附着系数,充分利用了当前路面的附着条件确保车辆在不同路面上行驶都能获得最大的驱动力。
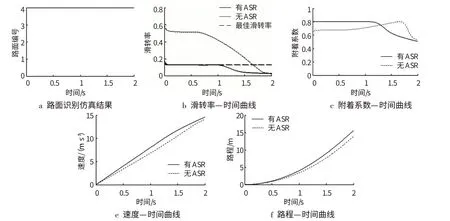
图4 大功率起步时各参数曲线图
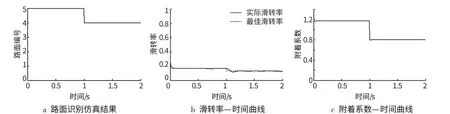
图5 持续加速时路面识别仿真及各参数曲线图
5 结论
以路面附着系数为识别参数,建立了6种典型路面的动态识别区间,车辆在行驶过程中对当前路面实时进行识别,同时将当前路面的最佳滑转率作为ASR系统的目标滑转率,当驱动力矩过大时通过实时调整制动力矩,使车轮的实时滑转率基本保持在当前路面的最佳滑转率,有效避免了车辆出现过度滑转,确保车辆能够获得最大的驱动力,同时能够保持横向稳定。
[1]余志生.汽车理论[M].4版.北京:机械工业出版社,2008.
[2]臧杰,阎岩.汽车构造[M].1版.北京:机械工业出版社,2010.
[3]沈杰.驱动防滑技术ASR在商用车上的应用[J].客车技术与研究,2009(3)∶34-36.
[4]周斯加,罗玉涛,黄向东,符兴锋.4WD电动车的滑转率识别及防滑控制[J].华南理工大学学报:自然科学版,2008,36(6):95-100.
[5]李刚,宗长富,张强,洪伟.基于模糊路面识别的4WID电动车驱动防滑控制[J].华南理工大学学报:自然科学版,2012,40(12):99-104.
[6]Kinche U,Dasis A.Estimation of Tyre Friction for Enhanced ABSSystems[C].In Proc.Aveg Congress,1994.
[7]张晓龙,孙仁云,李锋,林小龙.基于动态识别区间的路面识别方法研究[J].湖北汽车工业学院学报,2014,28(3)∶16-19.
[8]赵治国,顾君,余卓平.四轮驱动混合动力轿车驱动防滑控制研究[J].机械工程学报,2011,47(14):83-98.
[9]张晓龙,孙仁云,林小龙,李锋.基于附着系数曲线长度的路面识别仿真研究[J].湖北汽车工业学院学报,2014,28(2):1-4.
猜你喜欢
中学生数理化·八年级物理人教版(2022年9期)2022-10-24
小读者(2019年24期)2020-01-19
中国外汇(2019年13期)2019-10-10
汽车观察(2019年2期)2019-03-15
中学生数理化·八年级物理人教版(2017年6期)2017-11-09
山东青年(2016年12期)2017-03-02
光学精密工程(2016年6期)2016-11-07
发明与创新·中学生(2016年7期)2016-05-14
航天制造技术(2016年6期)2016-05-09
北京信息科技大学学报(自然科学版)(2016年6期)2016-02-27