
基于训练序列的SC-FDE系统符号同步改进算法
2014-11-20 08:18廖雪飞
电视技术 2014年5期
廖雪飞,白 勇
(海南大学信息科学技术学院,海南海口570228)
单载波频域均衡(Single Carrier Frequency Domain E-qualization,SC-FDE)是一种常见的无线传输物理层调制技术,它具有较好的抗多径衰落的特点。与正交频分复用(Orthogonal Frequency Division Multiplexing,OFDM)相比,SC-FDE主要的优势在于它的峰均功率比低、对非线性信号失真不敏感[1]以及对载波频偏和相位噪声敏感度低[2]。因此,SC-FDE是一种有广泛应用前景的无线传输技术。
在恶劣的信道环境下发送信号,接收机的同步是首先要解决的问题。在SC-FDE系统中符号定时同步错误不仅会引起信号幅度和相位的畸变,而且会引入符号间干扰,从而严重影响系统的性能。因为SC-FDE系统是以数据块的方式进行传输,所以符号定时同步的目的是找到快速傅里叶变换(Fast Fourier Transform,FFT)窗口正确的起始位置,以便正确地进行FFT运算。
现有的辅助数据符号定时同步算法一般有S&C算法[3]、Minn 算法[4-6]等。本文在研究了 Schmidl&Cox 和Minn符号定时同步算法的基础上,针对Schmidl&Cox峰值平台和Minn方法的旁瓣,提出采用不同的训练序列结构,并给出了两种定时测度计算方法。该算法同时克服了峰值平台和旁瓣现象,改善了SC-FDE系统的符号定时同步性能。最后分别在SC-FDE系统加性高斯白噪声(Additive White Gaussian Noise,AWGN)信道和多径信道下进行MATLAB仿真测试。结果表明,无论在多径信道还是低信噪比下,改进后的同步算法性能优于Minn算法。而且第二种定时测度方法在保持良好的同步性能下降低了计算量。
1 SC-FDE系统模型
SC-FDE系统框图,如图1所示。发射机首先产生二进制信源数据;其次进行单载波调制;再插入训练序列和循环前缀;然后封装成帧;最后通过天线将信号发送出去。信号经过无线信道到达接收端。接收机首先对接收信号进行解帧,信号经过粗定时和载波同步后,提取每帧的前导部分,再根据前导的特殊性进行细定时载波同步和信道估计。对提取的数据块进行FFT变换后,利用所得估计信道进行频域均衡,再对均衡后的数据进行傅里叶反变换(Inverse Fast Fourier Transform,IFFT),对变换后的数据进行解调,最后得到二进制输出数据。
2 常用定时同步算法
如果系统定时同步估计不准确,就可能引起严重的码间干扰。定时同步主要分为2类:一类是利用数据块中周期性的循环前缀进行同步;另一类是基于训练序列或导频的特点进行同步。前者中常用的有最大似然估计符号偏差算法,虽然对定时同步估计有效,但是在有码间干扰时性能不佳。后者利用了训练序列或导频的时域高相关性特点,但是由于插入了训练序列或导频,降低了数据传输效率,其常用的算法有Schmidl&Cox算法和Minn算法。
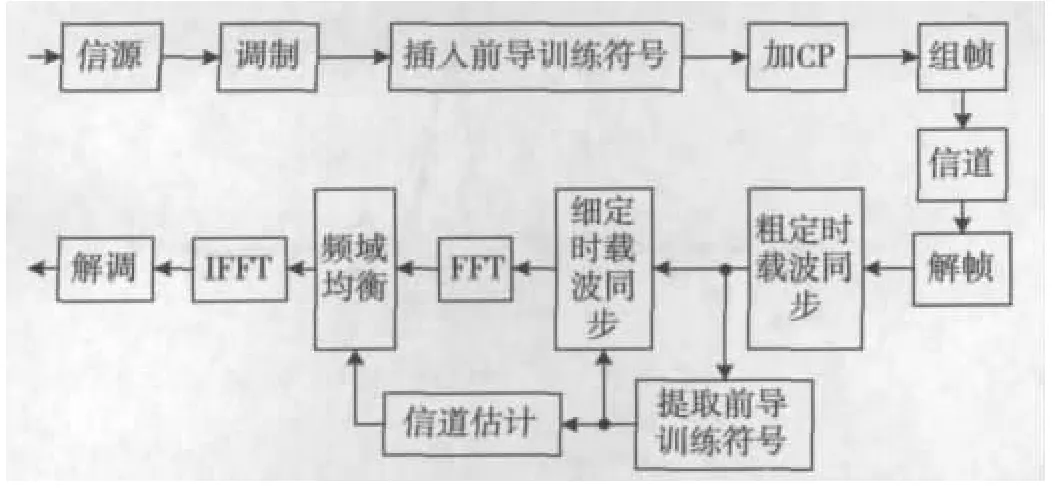
图1 SC-FDE系统框图
Schmidl&Cox算法[3]采用[A,A]的训练序列结构。训练序列A的偶数部分使用一个伪噪声序列(Pseudonoise Sequence,PN),奇数部分全为零,其前后两部分完全相同,且数据块A是具有良好相关特性的特殊训练序列。此算法通过在时域搜索前后两部分相同的训练序列相关峰值的最大值来确定符号的起始位置。主要的缺陷是存在峰值平台,降低了定时准确度。
Minn算法[4]采用[A,A,-A,-A]的训练序列结构。训练序列A由特殊的训练序列构成。训练符号总长度为N,训练序列A的长度为L,满足L=N/4。此算法通过搜索具有相关性的4部分训练序列相关峰值的最大值来确定符号的起始位置,解决了Schmidl&Cox算法的峰值平台现象,但是出现了大量的旁瓣,对定时同步存在干扰。
3 改进定时同步算法
为了克服Schmidl&Cox和Minn方法的缺点,从而获得更好的定时同步性能,本文将改变训练符号结构,采用[A,-A,-A,A]的结构,也可以是[-A,A,A,-A]。其中训练符号总长度为N,训练序列A的长度为L,满足L=N/4,且A具有良好的相关特性。图2给出了定时测度峰值出现位置示意图。s11,s12,s13和s14表示训练序列之前的一个数据块s1;s21,s22,s23和s24表示训练序列之后的一个数据块s2。其中s1的长度与A相等。根据定时测度公式可知,归一化的定时测度最大值为1。当分母一定时,只有分子的值越大,峰值越突出。只有使最大峰值处的值尽可能大,相反其他位置峰值的值尽可能小,才能减少旁瓣。假设接收端接收到的数据与发送端发送的数据完全一样,且发送的数据与训练序列的相关性为零,即s1,s2与A不相关。以下介绍两种定时测度算法。

图2 定时测度峰值出现位置示意图
1)改进定时测度算法1
改进定时测度算法1的目的是抑制旁瓣的产生。其定时测度算法为

式中:M1(d)表示归一化的定时度量;P1(d)表示4个数据块两两组合后的互相关值与+1或-1乘积的和;R1(d)表示4个数据块自相关的和与归一化系数的乘积。这里可以把分母看作是为了最大峰值归一化而计算出来的值,且有

式中:r(·)为接收到的数据;d为搜索窗的开始位置;L为滑动窗长;m为每个码元采样点数;k为4个训练序列的编号 0,1,2,3。
假设成立时,当同步起点在最大峰值处,由式(2)和式(3)可得R1(d)=3/2×[A2+(-A2)+(-A2)+A2]=3/2×4A2=6A2,P1(d)=(-A)·(-A)-A·(-A)+A·A+(-A)·(-A)-(-A)·A-(-A)·A=6A2,此时归一化的定时度量M1(d)为1。同理可知,峰值1处和峰值7处的P1(d)值为0,也就是说没有旁瓣;峰值2处、峰值3处、峰值5处和峰值6处的P1(d)值为A2,虽然有旁瓣出现,但与最大峰值相比要小很多,在一定程度上能够减少旁瓣的产生。
2)改进定时测度算法2
为了更有效地抑制改进定时测度算法1中出现的旁瓣和减少计算复杂度,本文对式(2)和式(3)作出改进,其中归一化的定时度量M2(d)中的P2(d)保留了P1(d)中的4项,R2(d)中的归一化系数为1。

式中:
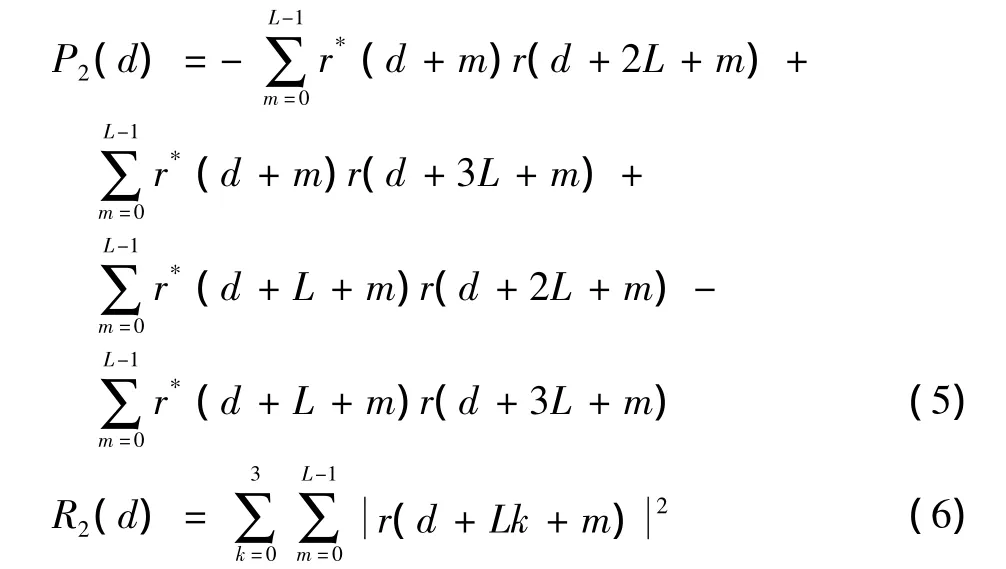
假设成立时,当同步起点在最大峰值处,根据式(5)和式(6)可得,R2(d)=A2+(-A2)+(-A2)+A2=4A2,P2(d)=-A·(-A)+A·A+(-A)·(-A)-(-A)·A=4A2,此时归一化的定时度量M2(d)为1。同理可得,峰值1处、峰值2处、峰值3处、峰值5处、峰值6处和峰值7处的P1(d)值为0,那么归一化的定时度量M2(d)等于0,即没有旁瓣。由此说明该算法在改进定时测度算法1的基础上又进一步改善了同步性能,很大程度上消减了旁瓣。但是在实际生活中因为噪声等其他因素的影响,最大峰值处的定时度量值的计算结果无限接近于1,却不等于1,而其他峰值处的定时度量值接近于0。
下面对以上4种算法进行分析。图3和图4分别比较了理想条件下Schmidl&Cox算法、Minn算法与改进定时测度算法1和改进定时测度算法2的归一化定时度量曲线。图5比较了理想条件下两种改进的定时测度算法的归一化定时度量曲线。MATLAB仿真条件:采用Zadoff-Chu序列作为训练序列;总训练序列长度和数据块长度(不包含保护间隔)为1 024;保护间隔为128;一个SC-FDE符号长度为1 152;为了更好地观察定时度量算法的优劣,在训练序列前面插入了一串长1 024的随机数据,所以正确的SC-FDE符号同步起始位置在第1 281采样点处。
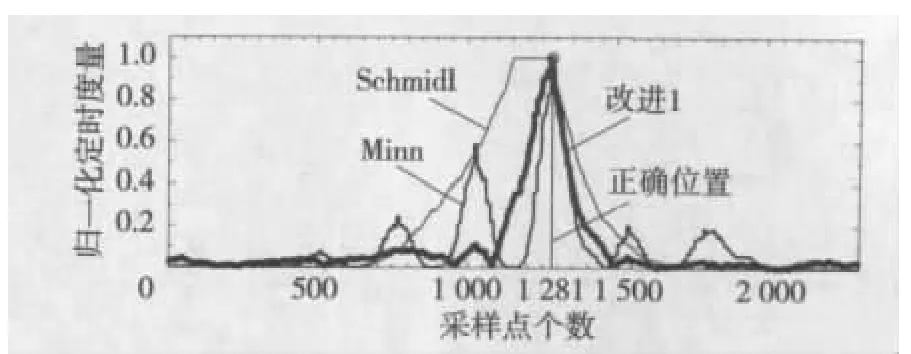
图3 理想条件下归一化定时测度比较

图4 理想条件下归一化定时测度比较
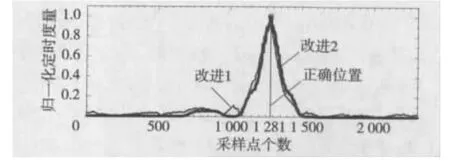
图5 理想条件下归一化定时测度比较
从图3和图4中可以看出Schmidl&Cox算法有明显的峰值平台,平台长度大约小于或等于保护间隔长度。由于峰值平台的出现使得搜索到最大值的位置出现较大的偏差,从而产生较大的定时误差。Minn算法虽然通过改变训练序列结构消除了峰值平台现象,但是在搜索到最大值的两侧出现了明显的旁瓣,这样在信道条件恶劣的情况下,右侧旁瓣的最大值容易对主峰的最大值造成干扰,从而导致定时同步出现误差。改进算法1克服了Schmidl&Cox算法的缺点,但是主峰两侧依然存在旁瓣,从图3中看到改进算法1相比Minn算法对旁瓣有一定程度的抑制作用。从图4中可以看到改进算法2既消除了峰值平台,又很好地抑制了旁瓣的出现,特别是右侧几乎没有旁瓣。图5说明在相同训练序列结构下,改进算法2的定时测度算法优于改进算法1,同时改进算法2简化了计算,节省了时间。
4 仿真结果
对本文提出的算法在MATLAB上进行仿真验证。SC-FDE系统的主要参数:AWGN信道和车行信道[7];FFT/IFFT长度为1 024;保护间隔为128;调制方式为16QAM;每种信道下仿真10 000次。由于在该仿真条件下Schmidl&Cox算法同步性能明显比其他3种差,因此没有给出其在AWGN信道和车行信道下的同步误差均值和同步误差绝对值的均方误差(Mean Square Error,MSE)曲线。
图6和图7分别是在AWGN信道下的同步误差均值和同步误差绝对值的均方误差。在信噪比(Signal Noise Ratio,SNR)大于或等于12 dB时,AWGN信道下的3种算法同步误差均值和MSE趋近于0。在SNR<12 dB时,改进算法2误差均值和MSE最小;改进算法1次之;Minn算法最大,甚至在SNR=-5 dB时误差均值达到了2个采样点。可见,改进后的算法在AWGN信道或低SNR下同步性能优于Minn算法。
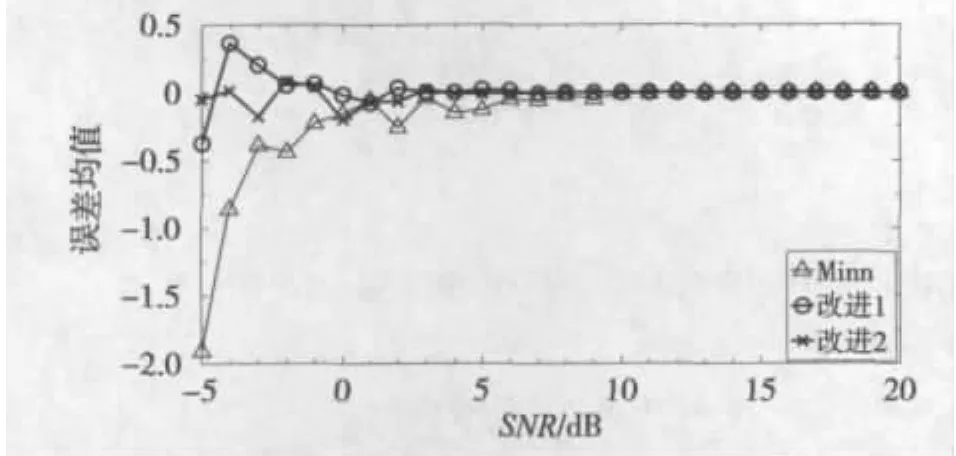
图6 AWGN信道下同步误差均值

图7 AWGN信道下同步误差绝对值的MSE
图8和图9分别给出了在车行信道下的同步误差均值和同步误差绝对值的MSE。在SNR≥10 dB时,车行信道下的3种算法同步误差均值和MSE趋近于2个采样点。在SNR<10 dB时,改进算法2与改进算法1性能相差不大,而Minn算法误差均值和MSE依然是三者中最大的。

图8 车行信道下同步误差均值
显然,信道对同步算法有影响。相同条件下,同步算法在AWGN信道中性能要好于车行信道。由于大量旁瓣的存在,使得Minn算法无论是在AWGN信道中还是在车行信道中误差均值和MSE都是最大的。相比之下,改进后的两种算法,因为有效地抑制了旁瓣的出现,从而获得了更稳定的同步性能,因此改进后的同步算法性能优于Minn算法,并在低SNR或多径信道中也有较好的表现。而且改进算法2还降低了计算复杂度,有效地缩短了计算时间,从而更快地检测到FFT窗口的起始位置。

图9 车行信道下同步误差绝对值的MSE
5 结束语
本文选用不同的训练序列结构,同时给出了两种定时测度计算方法,既避免了Schmidl&Cox算法峰值平台的定时模糊现象,又抑制了Minn算法因大量旁瓣而导致的较大定时同步误差。仿真结果表明,无论在多径信道还是低SNR下,改进后的同步算法的MSE优于Minn算法。而且第2种定时测度方法在简化计算的基础上仍然保持着良好的同步性能,方便在工程实现中缩短定时所需的时间。
[1] ADACHI F,TOMEBA H,TAKEDA K.Introduction of frequency-domain signal processing to broadband single-carrier transmissions in a wireless channel[J].The Institute of Electronics,Information and Communication Engineers,2009,E92-B(9):2789-2808.
[2]盛国芳,万戈.单载波频域均衡技术的研究[J].电视技术,2008,32(S1):8-10.
[3] SCHMIDL TM,COX D C.Robust frequency and timing synchronization for OFDM[J].IEEE Trans.Communications,1997,45(12):1613-1621.
[4]MINN H,ZENG M,BHARGAVA V K.On timing offset estimation for OFDM systems[J].IEEE Communications Letters,2000,4(7):442-244.
[5]刘然,江修富,郝建华.一种新的SC-FDE系统粗定时同步算法[J].电讯技术,2008,48(9):29-32.
[6]郑小真,孟艳花.基于训练序列的OFDM系统符号同步改进方法[J].光通信研究,2013(1):11-13.
[7] MYUNGH G,GOODMAN D J.Single carrier FDMA:a new air interface for long term evolution[M].America:John Wiley and Sons Ltd,2008:143-144.
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
数学物理学报(2022年3期)2022-05-25
数学物理学报(2022年2期)2022-04-26
数学物理学报(2020年4期)2020-09-07
海军航空大学学报(2020年2期)2020-07-27
数学年刊A辑(中文版)(2020年2期)2020-07-25
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
电子技术与软件工程(2017年12期)2017-07-05
电测与仪表(2016年14期)2016-04-11
