采用不同气动控制舵面的临近空间高超声速滑翔飞行器舵效研究
2014-11-08 07:10任怀宇李绪国
空气动力学学报 2014年2期
邓 帆,任怀宇,李绪国,谢 峰
(1.中国运载火箭技术研究院 空间物理重点实验室,北京 100076;2.中国空气动力研究与发展中心,绵阳 621000)
0 引 言
临近空间高超声速滑翔飞行器(以下简称滑翔飞行器)主要指采用高升阻比外形、长时间在临近空间进行远距离、无动力、高速机动滑翔飞行的飞行器,可利用自身高升阻比在大气层内实现长距离的滑翔飞行[1]。典型代表有美国升力体构形的通用大气飞行器(简称CAV)及俄罗斯翼身组合体构形的“依格拉”滑翔飞行器。可供选择的高升阻比外形主要以乘波体和升力体为代表,其中,乘波体受防热、内部装填空间等因素限制,根据目前的技术条件在工程可实现性方面有一定困难[2];翼身融合的升力体构形由体身产生主要升力,舵面起稳定及控制作用,升力体的滑翔增程能力较强,同时在结构强度和防热方面均有优势。
对于临近空间高超声速滑翔飞行器布局设计,本质难点是随飞行高度和马赫数的大幅度变化,滑翔飞行器压心变化范围大,气动布局设计需要保证高升阻比和舵效需求,并满足工程实用的铰链力矩限制[3-4]。在临近空间范围内,滑翔飞行器采取的控制方式主要有两种:气动舵控制和直接力控制[5-7]。一般而言,滑翔飞行器处于临近空间中下层区域,大气相对稠密,动压较大,气动舵舵效较高;而临近空间上层大气稀薄,气动舵效率低,可采用反作用控制系统(简称RCS)[8],鉴于RCS需要额外携带推进剂,同时控制机构比较复杂,在控制方案设计中多作为辅助系统。目前,滑翔飞行器采用的气动舵主要有三种:FLAP舵、后缘舵及全动舵。美国HTV-1气动外形为双锥削面升力体构形,在其尾部安装了FLAP舵;类乘波构形的HTV-2在迎风面同样采用了FLAP舵作为气动舵,并搭配安装于飞行器底部的RCS共同进行飞行器的操纵;翼身融合构形的HTV-3则采用了后缘舵,安装于体身延长体端部,航向控制采用突出于体身尾部之外垂尾上的后缘舵。国内王元元研究了低速航空飞行器的复合式气动舵设计[9],唐伟对钝双锥削面体采用FLAP舵及全动舵的操纵效率进行了比较分析[10-14]。
升力体主翼带有一定角度的安装角,鉴于主翼对前方气流的下洗,使得主翼后缘处气动舵舵效有别于传统轴对称外形的气动舵舵效,受气流分离再附现象的影响,舵面流场发展更为复杂,需要对空间流场做精细模拟,以准确描述出气动舵周围的流场变化,从而完善滑翔飞行器的气动控制面设计。本文对三种不同气动舵的舵效进行了比较分析,研究结果可为滑翔飞行器气动舵布局设计提供有价值的参考。
1 气动舵设计
滑翔飞行器在气动舵设计时应主要考虑以下方面:1)适当的静稳定度;2)偏航及滚转方向至少一方是稳定的;3)配平状态下俯仰、偏航、滚转三个方向应具备良好的动态稳定性。为实现机动飞行,滑翔飞行器需具备较高的控制效率,这就要求其质心位置与压心位置比较接近,即要求飞行器的静稳定裕度较小;而为获得高的控制效率,气动舵通常设计安装在远离质心的部位,以获得较大的力臂;同时,气动舵必须与弹体在尺寸和面积上相匹配,一方面确保飞行器获得合理的配平控制效率,一方面也确保控制面的气动力及气动热环境在可控范围内。滑翔飞行器采用双锥异形构型升力体布局,飞行器长度与翼展比值为2.12,飞行器模型的控制舵面分别采用FLAP舵(模型代号HGVF)、后缘舵(模型代号HGVT)及全动舵(模型代号HGVM),控制舵舵面积相同,约占飞行器体身升力面面积的6%。其中,模型HGVF在飞行器底部安装4片FLAP舵,底部两片进行纵向通道控制,上方两片负责航向操纵,通过差动纵向通道两片FLAP舵的方式进行滚控,由于飞行器底部下游为尾流区,卷起的涡流使得其内部气流方向变化剧烈,气动舵无法有效发挥作用,因此在控制时FLAP舵采用沿来流方向的单向作动;模型HGVT水平方向后缘舵的转轴安装于主翼面内,航向采用安装于削面的上下两片后缘舵进行方向控制;模型HGVM 4片控制面均为全动舵,水平方向全动舵的转轴位置在其几何中心。这三种气动舵模型如图1所示。
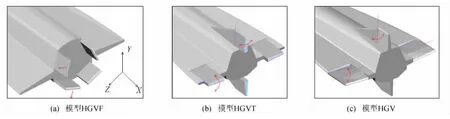
图1 带不同气动舵飞行器尾部示意Fig.1 Models with different aerodynamic rudders
2 数值模拟及风洞试验方法
采用数值计算和风洞试验相结合的手段对气动舵舵效进行分析,数值计算方法中采用有限体积法进行雷诺平均N-S方程(RANS)的空间离散;选取完全气体模型,不计热非平衡和化学反应的影响;30km~40km的飞行高度及雷诺数范围决定计算流态选取紊流,采用两方程的k-ε紊流模型封闭流动控制方程;对流项的离散采用Roe-FDS格式,粘性项采用二阶中心格式进行离散。按照飞行高度和马赫数确定来流条件,远场边界为基于局部一维Riemann不变量的无反射边界条件,物面为无滑移绝热壁面,超声速出流边界采用内部流场中心外推方式。
在网格技术上,采用分区对接/嵌套结构网格和结构/非结构混合网格(图2)分别处理纵向及航向气动舵舵偏状态。分区对接/嵌套结构网格的网格边界区域处理精度较高,适用于主翼及升降舵之间复杂外形的数值模拟;方向舵的偏转状态使用结构/非结构混合网格来处理,全流场主要采用对接结构网格,在方向舵周围空间用非结构网格填充,在舵面等较为关心的局部采用结构网格。
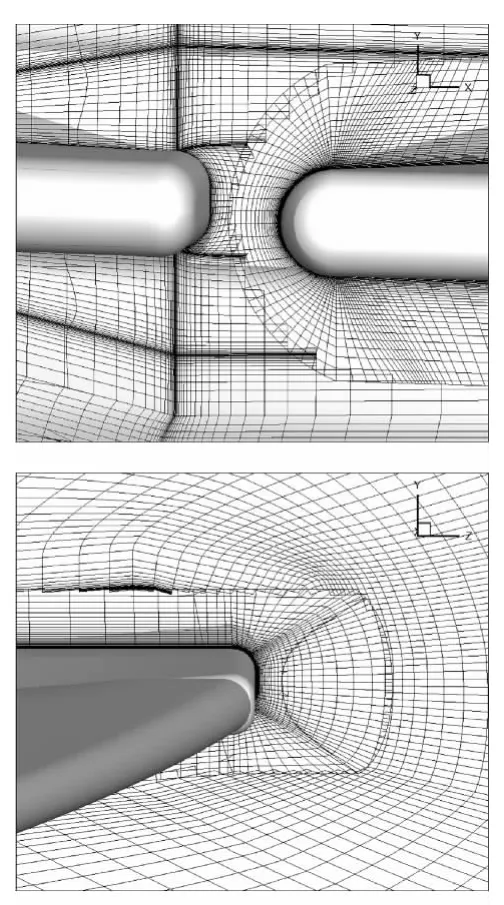
图2 全动舵及主翼计算网格局部Fig.2 Computational grid between all-movable rudder and wing
风洞试验在CARDC的低密度高超声速风洞中进行,该风洞模拟范围30km~90km,具备从连续流到过渡流模拟能力,通过更换型面喷管来模拟不同马赫数。试验选用石墨电阻加热器进行加热,试验气体介质为N2。考虑到风洞试验段尺寸和流场堵塞度的限制,试验模型采用7%缩比模型(图3)。
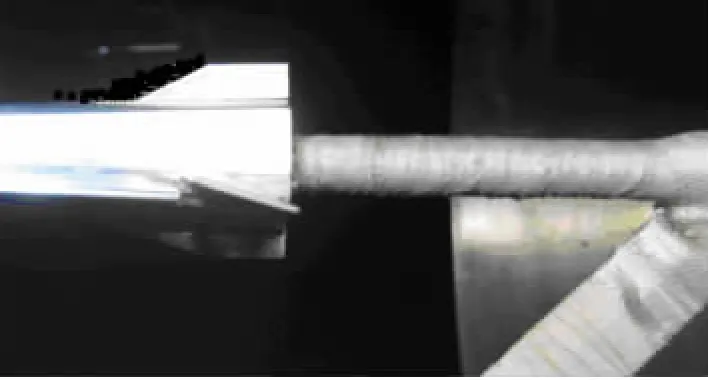
图3 试验模型HGVM气动舵照片Fig.3 Picture of model HGVM aerodynamic rudders in the wind tunnel
风洞试验以来流粘性干扰系数为相似参数,模拟高度H=33km~42km,马赫数M=5~10.5,粘性干扰系数=2.4×10-3~5.7×10-3,单位雷诺数Re∞L=1.97×107/m~1.43×107/m,攻角α=-4°~16°(间隔2°),偏航舵偏角δn=0°、5°、10°,俯仰及滚转舵偏角由水平方向控制舵对称及差动组合变化实现0°、±5°、±10°、±15°、±20°。
3 气动舵舵效分析
3.1 升降舵配平能力
滑翔飞行器在俯仰通道主要通过升降舵的偏转来保证其纵向稳定性,同时升降舵的配平能力直接影响总体质心配置范围。俯仰通道的配平能力定义为升降舵舵面极限偏转时能造成的飞行器压心变化范围,图4显示出M=6时滑翔飞行器采用不同气动舵作动时纵向通道的压心变化,在升降舵正负极限舵偏(-20°≤δm≤20°)的包络区域为可用质心区间,此区域范围越大,说明滑翔飞行器的配平能力越强。图中显示随攻角的增大,升力体构形的飞行器体身对法向力增量的贡献逐渐凸显,使得升降舵舵效均有所下降。
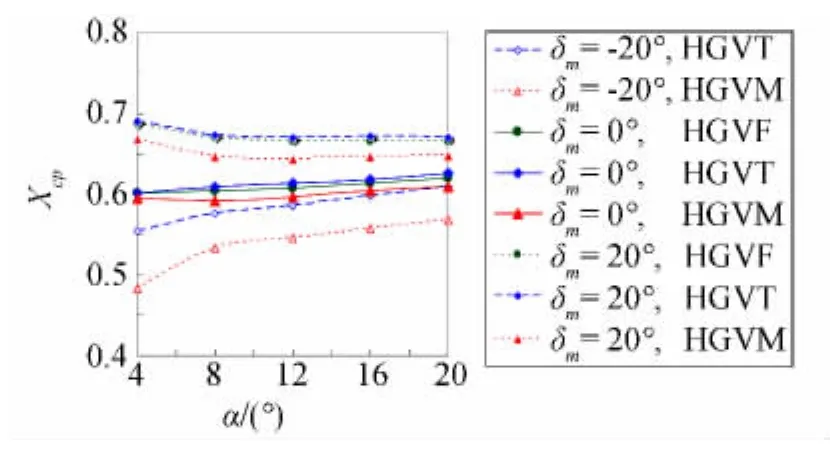
图4 不同升降舵舵偏对滑翔飞行器压心系数的影响(M=6)Fig.4 The effect of elevator angle on pressure centre of gliding vehicle(M=6)
据图可得出以下结论:1)单向作动的FLAP舵可调压心范围最小,略小于后缘舵正舵偏的调节能力;2)后缘舵负舵偏时舵面处于飞行器背风面低压区,调节压心能力约为相同正舵偏时的一半;3)带全动舵飞行器压心位置靠前,舵偏状态下主翼和舵面之间的缝隙使得来流改变全动舵背风面压强分布,不同于后缘舵上表面由于主翼遮挡形成的大面积低压区,全动舵前缘附近压强的上下沟通使得正负舵偏时舵效均衡,极限舵偏时包络区域最大,在纵向通道内有足够的配平能力。图5显示模型HGVM不同舵偏状态下翼舵之间马赫数分布及空间流线的发展情况,可见随全动舵舵偏角的增加,舵前缘对缝隙间气流的挤压效果直接影响到主翼后缘上表面处分离涡的结构。主翼后缘上表面的分离流动对零舵偏时升降舵的舵效影响较大,对正负舵偏时的舵面压力分布影响相对较小,从图4上可见,正负极限舵偏下的压心位置相对于零舵偏时的压心基本呈上下对称分布。
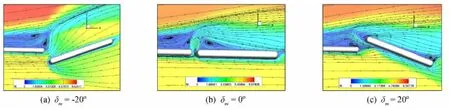
图5 模型HGVM翼面展向7%站位处马赫数云图(M=6,α=8°)Fig.5 Mach number nephogram at 7%span station of model HGVM (M=6,α=8°)
3.2 升降舵偏转对升阻比的影响
气动舵对滑翔飞行器升阻特性的影响主要体现在升降舵舵偏时升阻比的变化上,三种模型的升阻比随来流攻角增大先增加后减小(见图6),α=8°达到最大值,模型HGVF升阻比最大值为3.34,其余两种模型升阻比相差不大,在3.2左右。图中显示飞行器的升阻比随升降舵的偏转均有不同程度的下降,模型HGVF极限正舵偏时升阻比下降12%,模型HGVT后缘舵正负舵偏时舵面所处位置来流压强的不同,使得负极限舵偏的升阻比损失比极限正舵偏大3%,模型HGVM负舵偏时舵前缘暴露在主翼后缘的迎风面高压来流中,形成阻力较大的弓形激波,比较正舵偏时产生于舵下表面的附体斜激波,使得轴向力系数比同数值正舵偏大30%左右,升阻比损失达47%。
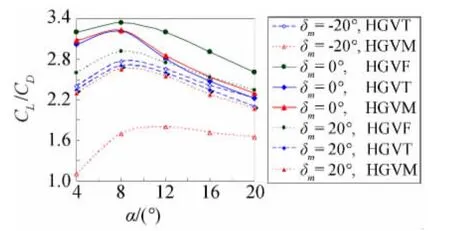
图6 不同升降舵舵偏对滑翔飞行器升阻比的影响(M=6)Fig.6 The effect of elevator angle on lift-to-drag ratio of gliding vehicle(M=6)
飞行器质心的配置需要综合考虑操稳特性及其升阻特性,带FLAP舵飞行器由于舵面的单向作动特性,一般情况下设计为压心在质心之前,飞行器具有小量静不稳定度,通过FLAP舵偏转从而提供低头力矩;带后两种气动舵的飞行器由于负舵偏可提供有效抬头力矩,可放宽纵向静稳定性要求,图7及图8为试验模型HGVM升降舵处于零舵偏时的风洞试验数据,图7中数据显示,小攻角范围内,随着飞行高度及马赫数的增加,当M>8后飞行器压心逐渐前移,静稳定度的变化使得舵面操纵对飞行器升阻特性的影响增大;和后缘舵相比较,飞行器升阻比对全动舵的偏转更为敏感,考虑到正负舵偏造成升阻比损失的不对称性,飞行器适合设置为静不稳定或静中立稳定,在由低空低马赫数向高空高马赫数过渡时,舵偏状态为小角度负舵偏逐渐转为正舵偏,由此避免大角度负舵偏带来的大幅升阻比损失,同时避免升降舵前缘暴露在迎风面来流中所导致的热防护问题。图8数据显示,随马赫数及高度的增加,模型HGVM最大升阻比从3.2逐渐降低到2.7,仍体现出升力体良好的升阻特性。
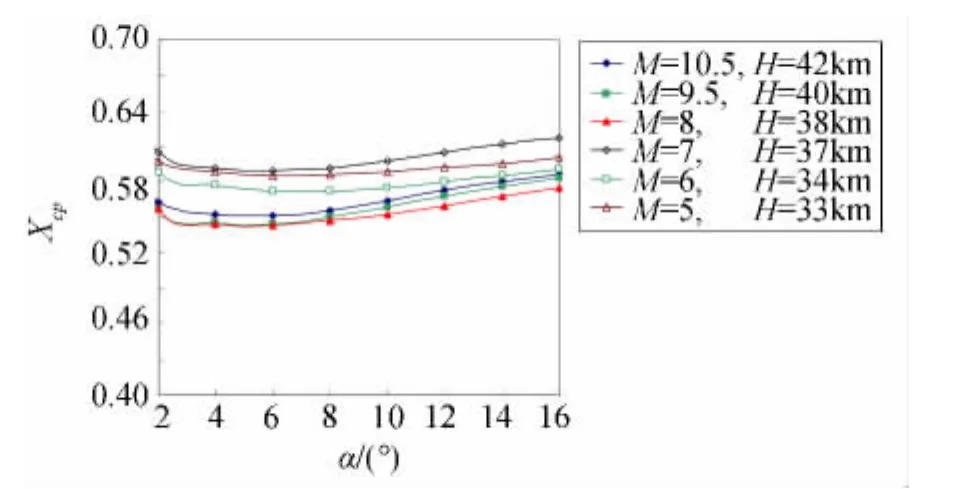
图7 试验模型HGVM压心系数随攻角的变化(δm=0°)Fig.7 The variation of model HGVM pressure centre with angle of attack(δm=0°)
3.3 偏航通道方向舵舵效
航向控制根据气动舵不同的安装位置体现出舵效的差异,采用单位方向舵偏转产生的偏航力矩系数增量评估方向舵舵效,模型HGVF的航向控制采用安装于机体尾部上方两侧的FLAP舵,图9显示由于处于飞行器背风面低压区,FLAP舵在航向上的舵效较低,并随着攻角的增加进一步减小,无法有效进行偏航操纵,若将方向舵安装于体身下表面,由于纵向俯仰控制的两片FLAP舵处于飞行器尾部下风处,方向舵舵面的偏转会直接影响升降舵舵效,对于带FLAP舵的飞行器而言,更为可行的航向机动方式是倾斜转弯技术(Bank-To-Turn,简称BTT);模型HGVT及模型HGVM方向舵舵效明显高于模型HGVF,由于活动控制面大小的不同,带全动舵飞行器的方向舵舵效为带后缘舵飞行器的一倍多,两种模型偏航控制的方向舵位置相同,均对称安装于机体上下削面,保证飞行器在拉起和下压时总有控制舵面处于迎风面内,舵面布局的优势体现在随攻角的增加两者的舵效基本呈线性增长。
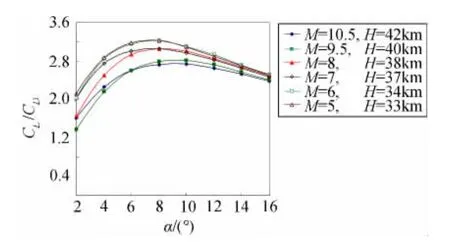
图8 试验模型HGVM升阻比随攻角的变化(δm=0°)Fig.8 The variation of model HGVM lift-to-drag ratio with angle of attack(δm=0°)
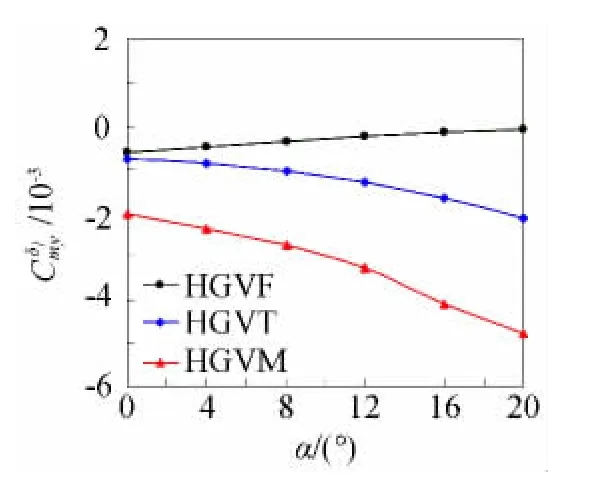
图9 方向舵舵效(M=6)Fig.9 Rudder effect of lateral rudder(M=6)
通过滑翔飞行器方向舵表面极限流线的发展可分析出舵偏情况下流场的变化,图10是滑翔飞行器体身上部方向舵附近的表面极限流线图及空间截面流线图。可见由于舵偏角的存在,方向舵两侧的流场呈不对称分布,明显的分离流动出现在方向舵背风侧,迎风侧在舵根处出现较弱的分离,在舵的前缘附近及背风侧体身削面边界处流动出现了分离再附和漩涡结构,说明该滑翔飞行器小攻角范围内背风区的方向舵仍可以进行有效的偏航控制。
3.4 滚转通道升降舵差动舵效
滚转通道的控制通过升降舵的差动来实现,模型HGVF单向作动的特点使其差动方式与其余两种模型有所不同:保持一片FLAP舵不动,偏转另外一片FLAP舵从而获得滚转方向的差动力矩,图11显示模型HGVF的差动舵效比其余两种模型小一个数量级,模型HGVT及模型HGVM虽然升降舵舵面积相同,但由于安装位置的不同使得全动舵差动的力臂较大,舵效比带后缘舵飞行器大1/3左右。同时需考虑到低空高动压时飞行器操控时铰链力矩对气动舵的限制,全动舵舵轴一般安装于舵面中心位置附近,铰链力矩系数为小量,可有效克服后缘舵铰链力矩系数过大的问题。

图10 体身上部方向舵表面极限流线及空间截面流线(M=6,α=8°,δn=5°)Fig.10 Surface limit streamtraces of gliding vehicle lateral rudder(M=6,α=8°,δn=5°)
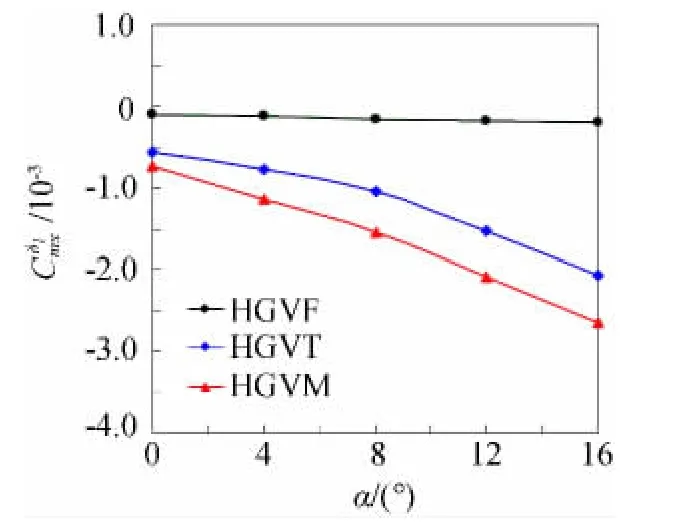
图11 升降舵差动舵效(M=6)Fig.11 Rudder effect of jencket rudder(M=6)
4 结 论
通过数值计算方法对滑翔飞行器的三种不同气动舵在高超声速时的舵效进行了比较分析,同时采用风洞试验手段研究了高度H=33km~42km、马赫数M=5~10.5范围内带全动舵滑翔飞行器的升阻特性,得到以下结论:
1)带FLAP舵滑翔飞行器具有良好的升阻特性,舵偏造成的升阻比损失较小,但FLAP舵单向作动的特点使其调节压心的能力较弱,同时FLAP舵在偏航及滚转控制时舵效均比后缘舵和全动舵小一个量级;
2)后缘舵负舵偏时舵面处于飞行器背风面低压区,调节压心能力约为相同正舵偏时的一半,由舵偏引起的升阻比损失小于全动舵,其布局方式有利于舵面热防护,在滚控时差动舵效小于带全动舵飞行器;
3)全动舵在纵向通道内有足够的配平能力,负舵偏时舵前缘暴露在主翼后缘的迎风面高压来流中,使得轴向力系数比等值正舵偏大30%左右,升阻比损失达47%,考虑到正负舵偏造成升阻比损失的不对称性,飞行器适合设置为静不稳定或静中立稳定,在偏航及滚转控制时舵效均高于后缘舵,由于其舵轴位置靠近舵面中心,可克服后缘舵所面临的铰链力矩过大的问题,有效降低对舵机载荷的要求。
[1]YE Y D.Study on aerodynamic characteristics and design optimization for high speed near space vehicles[J].AdvancesinMechanics,2009,39(4):387-397.(in Chinese)叶友达.高空高速飞行器气动特性研究[J].力学进展,2009,39(4):387-397.
[2]LIU J X,HOU Z X,CHEN X Q.Research on geometry design for hypersonic glide vehicle[J].MissilesandSpaceVehicles,2011,(3):1-5.(in Chinese)刘建霞,侯中喜,陈小庆.高超声速远程滑翔飞行器外形设计方法[J].导弹与航天运载技术,2011,(3):1-5.
[3]SPENCER B.Supersonic aerodynamic characteristics of hypersonic low-wave-drag elliptical body-tail combinations as effected by changes in stabilized configuration[R].NASA-TM-X-2747,1973.
[4]ZHU L G,WANG Y F,ZHUANG F G,et al.The latera-directional departure criteria analysis of high-speed and high manenverability aircraft[J].JournalofAstronautics,2007,28(6):1550-1553.(in Chinese)祝立国,王永丰,庄逢甘,等.高速高机动飞行器的横航向偏离预测判据分析[J].宇航学报,2007,28(6):1550-1553.
[5]CAI Q Y,DU T,ZHU G S.The aerodynamic design technology for new type hypersonic vehicle[J].JournalofAstronautics,2009,30(6):2086-2091.(in Chinese)蔡巧言,杜涛,朱广生.新型高超声速飞行器的气动设计技术探讨[J].宇航学报,2009,30(6):2086-2091.
[6]YANG Y J,ZHANG L P,GAO S C,et al.Numerical analysis of aerodynamics for missile with control-flaps[J].ACTAAerodynamicaSinica,2003,21(4):482-488.(in Chinese)杨永健,张来平,高树椿,等.带控制舵弹体气动特性分析[J].空气动力学学报,2003,21(4):482-488.
[7]HE Z C,GUO Y J,CHE J,et al.Investigation of a new concept of maneuverable warhead configuration with knoblike control surfaces[J].ACTAAerodynamicaSinica,2010,28(3):328-331.(in Chinese)和争春,国义军,车竞,等.机动弹头的旋钮式气动舵面布局新概念研究[J].空气动力学学报,2010,28(3):328-331.
[8]WANG X T,ZHOU J,LIN P.Proposing moving centroid/RCS control strategy for reentry flight vehicle[J].JournalofNorthwesternPolytechnicalUniversity.2011,29(2):212-216.(in Chinese)王霄婷,周军,林鹏.再入飞行器变质心/RCS复合控制策略研究[J].西北工业大学学报,2011,29(2):212-216.
[9]WANG Y Y,ZHANG B Q,SHEN D.Exploring combined capability of aerodynamic control surfaces of W-shaped tailless configuration[J].JournalofNorthwesternPolytechnicalUniversity,2008,26(6):698-702.(in Chinese)王元元,张彬乾,沈冬.W型无尾布局复合式气动舵面设计研究[J].西北工业大学学报,2008,26(6):698-702.
[10]TANG W,GUI Y W.Aerodynamic analysis for a reentry vehicle with slice-flaps[J].ACTAAerodynamicaSinica,2009,27(1):93-96.(in Chinese)唐伟,桂业伟.带控制舵钝双锥削面体的气动特性研究[J].空气动力学学报,2009,27(1):93-96.
[11]TANG W,ZHANG Y,MA Q,et al.Aerodynamics configuration design for elliptical cross-section vehicle with flaps[J].ACTAAerodynamicaSinica,2006,24(2):223-226.(in Chinese)唐伟,张勇,马强,等.带控制舵椭圆截面飞行器的气动设计[J].空气动力学学报,2006,24(2):223-226.
[12]TANG W,MA Q,ZHANG Y,et al.A study on conic maneuverability of a biconic vehicle with flaps[J].ACTAAerodynamicaSinica,2006,24(1):80-84.(in Chinese)唐伟,马强,张勇,等.带控制舵飞行器机动特性研究[J].空气动力学学报,2006,24(1):80-84.
[13]TANG W,LI W J,GAO X C,et al.Aerodynamic prediction and analysis for a reentry vehicle with slice-ailerons[J].Journal ofNorthwesternPolytechnicalUniversity,2004,22(5):541-544.(in Chinese)唐伟,李为吉,高晓成,等.削面/配平翼飞行器的气动计算及分析[J].西北工业大学学报,2004,22(5):541-544.
[14]MA Q,TANG W,ZHANG L M.Engineering prediction method for aerodynamics of biconic vehicle with flaps[J].Journalof Astronautics,2003,24(6):552-554.(in Chinese)马强,唐伟,张鲁民.带控制舵双锥体气动力工程计算方法研究[J].宇航学报,2003,24(6):552-554.
猜你喜欢
装备环境工程(2022年9期)2022-10-13
装备环境工程(2022年7期)2022-08-10
兵器装备工程学报(2021年12期)2022-01-11
西安航空学院学报(2021年3期)2021-10-14
民用飞机设计与研究(2021年1期)2021-04-06
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
科学与财富(2018年1期)2018-03-03
智富时代(2018年11期)2018-01-15
智富时代(2018年11期)2018-01-15