基于语音识别的综采自动化远程控制系统研究
2014-11-05 06:57马昆MAKun任予鑫RENYuxin秦奋勇QINFenyong
价值工程 2014年30期
马昆 MA Kun;任予鑫 REN Yu-xin;秦奋勇 QIN Fen-yong
(神华宁夏煤业集团梅花井煤矿,银川751411)
1 概述
综采工作面是矿井生产的核心,对综采工作面进行自动化控制是实现矿井生产管理现代化,转变煤炭工业发展方式,引领煤炭工业健康发展方向的关键技术途径[1-3]。自21世纪以来,我国在许多矿业集团开始探索工作面少人化、无人化的技术路线,如山东新汶矿业集团、神华宁夏煤业集团、大同煤矿集团,这些企业对综采工作面自动化的研究与应用,有力的促进了我国综采技术进步,改变了工人的操作习惯,对降低劳动强度、提高综采生产效率、保障安全生产、减少人员具有重大意义,标志着我国煤炭行业的综采自动化建设已取得初步成效,为薄煤层及中厚煤层工作面无人化开采积累了成功经验。
目前,综采工作面自动化控制技术水平的高低成为体现煤矿现代化水平和煤机装备是否先进的重要指标[4],尤其在各矿打造“集约化、智能化、人性化、本质安全、绿色和谐”矿区过程中作用越来越突出。综采工作面自动化通常采用“以工作面自动控制为主,监控中心远程干预控制为辅”的工作自动化生产模式[5]。这种生产模式把工人解放到监控中心,通过操作台实现对设备的控制。现有的这种远程控制主要以人在操作台的操作为主,容易造成控制响应时间长、时效性差,还容易发生误操作、增加了安全隐患和煤炭损失等问题。为了更好的提高远程控制的时效性,杜绝误操作等事故的发生,本文提出一种基于语音识别的远程控制技术方案。
2 语音控制系统模型
2.1 语音控制系统基础平台 语言控制系统的基础平台是集成于监控中心的各个单机控制系统和以太网控制平台。综采工作面自动化顺槽监控[6-7]中心是语音识别系统的首要基础平台,其功能是将采煤机控制系统、支架电液控制系统、工作面运输控制系统、三机通信控制系统、泵站控制系统及供电系统有机结合,实现对综合机械化采煤工作面设备的协调管理与集中控制。
以太网控制平台是在综采工作面原有采煤机、液压支架、刮板输送机等单机子系统以及工作面视频系统的层级基础上,利用工作面的综合接入器、光电转换器和交换机等构建的统一开放的工作面100M工业以太网控制平台,使工作面设备连接到顺槽集控中心的隔爆服务器,实现工作面设备信息汇集与实时显示,供操作者分析决策与控制,为综采设备的远程遥控提供依据。
2.2 关键技术及系统描述
2.2.1 关键技术 语言识别技术是信息技术中人机接口的关键技术,其目的就是让计算机等设备能够“听懂”人类语音,提取出语音中所包含的特定信息,成为人机通信和交互最便捷的手段。本文提出的语言控制功能实施方案依靠的技术支撑是当前比较成熟的非特定人语言识别技术[8-10]。
2.2.2 语言控制系统描述 语言控制系统可选用非特定人语音识别芯片,该芯片是非特定人语音识别的专用芯片,不仅具备基本的通讯、联络功能,还将与天玛公司自动化系统中的电液控制系统、运输控制系统、泵站控制系统、采煤机自动跟机、远程控制以及各系统运行信息检测与上传等功能集成于一体,依据上述基础平台系统反馈的数据信息进行远程语言控制(系统框架如图1所示)。语言系统与上述系统相融合,相统一,旨在为综采工作面自动化技术提供更加专业化的整体解决方案。不仅方便用户对该识别系统进行采购使用与管理,也避免了因不配套造成的接口不统一、参数不匹配、相互冲突等问题。

图1 顺槽监控中心语言集中控制系统架构图
2.3 软件设计 将语言识别系统与井下综采工作面监控主机、备份机一起安装在井下控制台的内部,整个语音识别控制系统与监控主机以及各子系统主机的连接保证高速、可靠的性能要求,提高系统的可靠性、实时性和安全性。语言识别系统同监测控制主机、电液控制主机、工作面监控主机、工作面通讯控制器之间相互提供接口,采用TCP/IP连接,用来传递语音控制数据。该设计依赖监控中心主画面的参数信息和视频信息,取得相关设置参数,在操作台中相应数码管中显示应该跟机动作的架号或其他设备运行参数,通过语音控制快速选择到需要调整的架号或者设备,即可直接启动相应支架的动作或者设备的动作。语音控制的实质是将人的听觉延伸到工作面,让计算机能依据人的语音命令控制相应的程序动作,进而实现设备操作与控制。如图2所示。
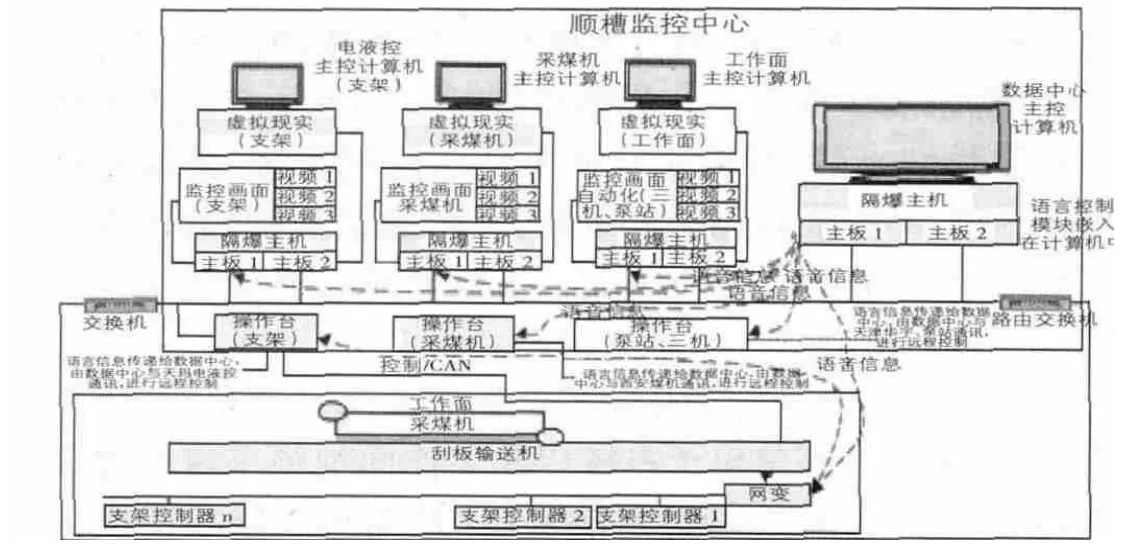
图2 语音识别系统软件设计示意图
3 语音控制系统功能及其实现
3.1 系统功能 数据传输;语音检测;采煤机远程控制;液压支架远程控制;液压支架安全控制(姿态调整、收伸伸缩梁及互帮);解决支架脱架问题;顶梁与采煤机滚筒干涉问题;液压支架与采煤机速度匹配的问题;防碰撞。
3.2 系统实现 综采设备进入全自动化工作模式后,在运行过程中实时监控工作面综采设备运行工况,当设备运行异常,可以通过人工语音手段对设备进行远程干预。如采煤机摇臂的调整、液压支架的动作等。
3.2.1 采煤机远程控制功能 依据采煤机主机系统及工作面视频(如图3所示),通过操作采煤机远程操作台语音控制系统实现采煤机的远程控制功能,可以进行采煤机的启停控制、运行速度控制和前后滚筒摇臂高度控制等。

图3 采煤机实时监控画面

图4 液压支架远程监控实时画面
3.2.2 液压支架远程控制功能 在支架电液控制系统标配基础上,通过电液控制系统数据传输,在监控中心显示出电液控制系统所有数据信息,如传感器数值、控制器状态、采煤机位置等(如图4所示)。同时,通过以太网传输,在监控中心显示出工作面支架视频画面。依赖电液控计算机主画面和工作面视频画面为辅助手段,通过支架远程操作台语音控制系统实现对液压支架的远程控制。在跟机自动化割煤过程中,使用液压支架操作台语言控制系统进行远程操作,人工干预支架动作,以满足较为复杂的地质条件。例如,在跟机自动化过程中发现自动移架过程中,降柱或移架同时进行抬底,降柱或移架功能消耗较多液压流量,导致抬底幅度较小,移架不到位、丢架等现象的发生(如图5所示),依据液压支架主画面和工作面视频画面作出判断和决策,通过监控中心语音控制系统操作者借助语音手段让丢架或移架不到位的架号再次动作,以满足正常采煤要求。
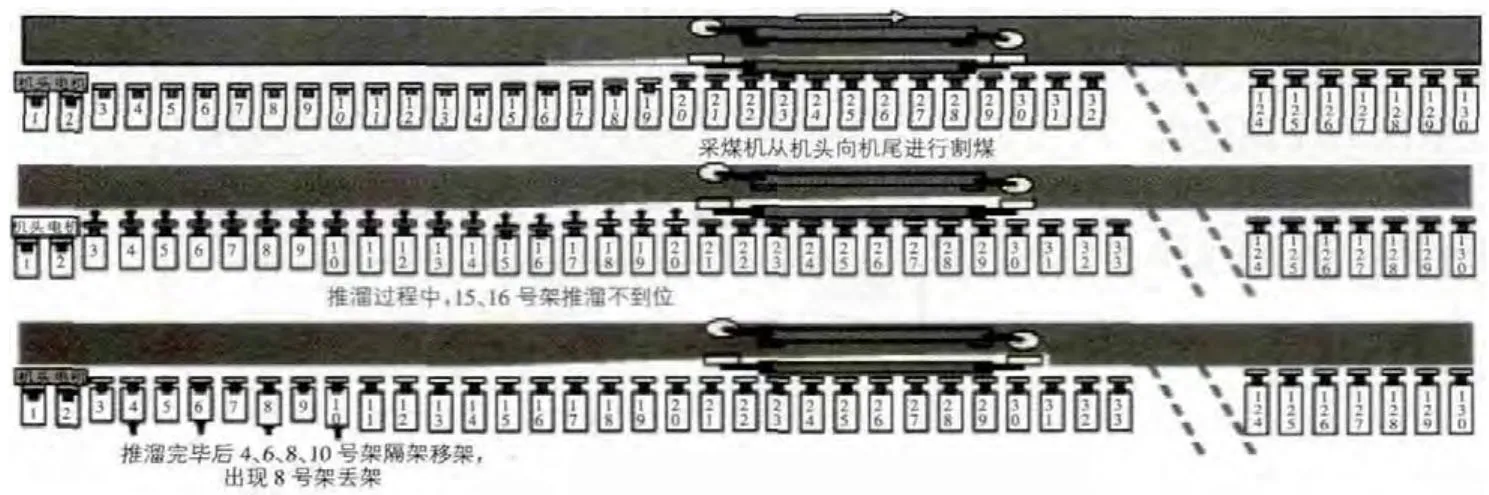
图5 煤过程示意图
4 小结
本文的主要思路是:在工作面快速开采的条件下便捷的通过语音手段进行远程干预。由此提出一种新的控制模式:语音控制功能。在工作面开启跟机自动化以后,依赖控制中心实时显示的参数信息和视频信息,取得相关设置参数,作出操作的分析和决策,使操作者在监控中心操作台借助语音手段实现设备的控制。本文的研究探索了一条工作面自动化控制的新思路,对提高综采生产效率、减少人员、降低工人劳动强度具有重大意义。
[1]赵永德,宋鹏,陈爽度,等.综采工作面自动化技术[J].煤炭技术,2010,29(1):82-84.
[2]吴立新,汪云甲,丁恩杰,等.三论数字矿山—借力物联网保障矿山安全与智能采矿[J].煤炭学报,2012,37(3):357-363.
[3]谭得健,徐希康,张申.浅谈自动化、信息化与数字矿山 [J].煤炭科学技术,2006,34(1):23-27.
[4]王国法.煤矿高效开采工作面成套装备技术创新与发展 [J].煤炭科学技术,2010,38(1):63-68.
[5]黄曾华,苗建军.综采工作面设备集中控制技术的应用研究[J].煤炭科学技术,2013,41(11):14-17.
[6]闰孝短,付华,刘南,等.综采自动化监控系统设计与实现[J].仪表技术与传感器,2010(10):73-75.
[7]张敏,于宝申.煤矿综合自动化监控系统设计及应用[J].煤炭技术,2008 27(2):37-39.
[8]袁毅,吴晨.柔性可扩展体系结构非特定人语音识别系统[J].计算机应用研究,2005,203-205.
[9]李虎生,刘加,刘润生.语音识别说话人自适应研究现状及发展趋势[J].电子学报,2003,(1):103-108.
[10]张昊天.邮包核对语音识别系统的开发和实现[D].北京:清华大学电子工程系,2000.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
防爆电机(2022年1期)2022-02-16
化工管理(2021年7期)2021-05-13
装备制造技术(2020年3期)2020-12-25
阅读(快乐英语高年级)(2019年5期)2019-09-10
电子制作(2019年14期)2019-08-20
电子制作(2019年9期)2019-05-30
小说界(2018年5期)2018-11-26
专用汽车(2016年4期)2016-03-01
河南科技(2014年18期)2014-02-27