
基于DSP的永磁无刷直流电动机控制系统的设计与研究
2014-09-29 02:30张云云
集宁师范学院学报 2014年1期
杨 瑞 张云云
(集宁师范学院计算机系,内蒙古 乌兰察布 012000)
1 引言
永磁无刷直流电动机是利用电子换向器取代机械电刷,将电子线路与电机融为一体,用无接触式的转子位置传感器代替基于接触导电的电刷.转子为永磁体,通过控制定子绕组的电流来进一步控制电动机的电磁转矩,实现电动机的平稳运转.已被广泛应用于汽车、军事、航空航天、家用电器等领域,受到人们的青睐.
2 硬件系统
硬件系统是由功率板、DSP控制器、键盘显示板、永磁无刷直流电机构成.功率驱动板包括功率放大电路、电流检测电路、接口电路和电源变换电路等,它可保证驱动板电压的稳定,实现过流保护.DSP控制器采用TI公司的TMS320LF2812芯片,它不仅数字信号处理能力强,还具有强大的事件管理能力,适用于需要处理大量数据的各种测控系统,负责数据通信、控制算法和监控.键盘显示板通过串口控制,按下显示板上的按钮,向DSP板发送电机启停、转速等控制信号,控制电机按照设定的方式和状态运行.电机采用三相Y型全控桥电路,磁极对数为3.
3 软件系统
软件系统实现系统的控制任务,采用模块化的编程思想,在CCS3.3调试仿真软件中使用C语言对TMS320LF2812进行编程.本系统采用速度、电流双闭环的复合控制方式,内环为电流环,使电流跟随给定电流而变化,保证起动时电机能获得允许的最大电流,提高系统的动态性能,采用时不变PI控制.外环为速度环,使转速跟随给定速度变化,实现转速稳态无静差,采用时变PI控制.控制原理如图1所示:

图1 系统控制原理图
软件系统主要包含主程序、中断子程序、斜坡子程序、PID调节子程序、PWM脉宽调制程序.
3.1 主程序
对项目整体进行了详细的需求分析的基础上,确定了软件系统的整体流程如图2所示:
在主程序中首先初始化变量和DSP,电机转起来之后,循环等待定时器周期中断和键盘输入并及时更新显示.在定时器中断处理程序中完成A/D转换和实时速度的计算,并进行速度和电流的PID调节.

图2 软件系统流程图
3.2 初始化模块
设置系统控制寄存器PLLCR的值为10,HISPCP、LOSPCP的值分别为 0和 2,这样,在外部晶振为 30MHz的情况下,SYSCLKOUT=30 MHz×10/2=150 MHz,高速、低速外设时钟分别为SYSCLKOT/1和 SYSCLKOUT/4.通过对 PCLKCR赋值,使事件管理器EV、模数转换器ADC、串行通信接口SCI等外设时钟.设置SCI模块的通信数据格式为波特率9600,数据位为8位,无极性校验,停止位1位,使能SCIA和SCIB的发送中断、接收中断和I/O引脚.初始化事件管理器EVA,设置中断类型为定时器2周期中断,周期为50us,计数模式为连续增计数模式.初始化ADC模块,设置ADC的内核时钟为HSPCLK/12,允许EVA触发启动SEQ1,顺序采样,自动转换序列中完成的最大转换通道数为4,采样频率为 20KHZ, 采样的通道顺序为 0、1、2、3.定义并初始化了用于HALL信号处理、速度计算等整型变量,声明用于PID控制的PIDREG3类型变量,用于换相控制的PWMGEN类型变量,用于电流采集的ADCVALS类型变量,用于缓冲调节的RMPCNTL 类 型 变 量 .PIDREG3、PWMGEN、ADCVALS、RMPCNTL等都为头文件中声明的结构体类型.
3.3 定时器中断子程序(主中断程序)
当定时器2发生周期中断时,执行主中断程序.定时器2每发生一次周期中断就启动一次ADC进行电流采集并将转换结果累加到静态局部变量中,连续采样18次,去掉最大值和最小值,最后求16次采样的平均值,即为当前电流值,赋给system.I_DC.
三相Y型绕组全控桥式结构的永磁无刷电动机在任意时刻有两相绕组导通,第三相绕组处于悬空状态.功率管有6种触发状态,每隔1/6周期(1/6圈)换相一次,即HALL信号每变化一次,电机转过 1/6圈.用一个变量hall_change_time_ave统计转过1/6圈所用的周期数,每个周期的时间为50us,将微秒转化为秒 , 电 机 的 转 速 可 表 示 为 :(1/6)转/(50*hall_change_time_ave*10-6/60)分 , 即200000/hall_change_time_ave 转/分.
求出实际转速和当前电流后,调用速度环和电流环程序.电机的实际转速和速度参考值进行速度PID调节,得到电流参考值,与当前采样到的实际电流值一并输入电流PID调节器,输出调节电流,进行PWM脉冲调制,达到对电机速度控制的目的.
3.4 电流环程序
电流环采用时不变PID调节,具体采用增量式PID控制算法,可实现快速调节和无静差调节.公式为:

u(t)=u(t-1)+△u(t),其中 kp为比例系数,ki为积分系数,e(t)为第t时刻的偏差信号,u(t)为第t时刻的控制量,△u(t)为第t时刻的控制调节增量.电流调节参数赋值如下:

为速度输出,即电流参考值

为当前实际电流

3.5 速度环程序
速度调节采用时变PID调节,计算公式如下:Ireft=Ireft-1+kp(e(t)-e(t-1))+kiTe(t)其中,kp为比例系数,ki为积分系数,T为速度调节周期,值为12.8ms,即255个PWM周期(每个PWM周期为50us).kp和ki的值不是固定的,而是随e(t)的变化而变化,kp和ki的表达式如下:

在速度调节程序中,使用if条件语句对e(t)的绝对值进行判断,进而灵活地确定kp和ki的值.
3.6 斜坡程序
通过显示板设定输出占空比,从而改变输出电压的大小,最终改变电机运转速度.为了避免电压剧烈的变化引起电机的振动,占空比信号首先输入给RMPCNTL模块,此模块将产生一个斜坡函数,按照一定的延迟率在一定时间内线性加大或减小,逐步达到输入,这样便可以消除输入突变产生的振动.
3.7 PWM脉宽调制程序
通过改变PWM脉宽达到转速调节的目的.此处采用全桥调制方式,即在任意时刻,对功率逆变电路的T1-T6进行脉宽调制.将电流调节的输出pid1_idc.Out作为PWM调节的输入.代码如下:

PWM脉宽调制程序代码如下:

4实验结果及分析
在完成控制系统的设计后,进行了实验调试,通过串口SCI将电机的转速输出到串口调试助手中,然后利用EXCEL根据收集到的转速数据绘制了转速变化曲线图:
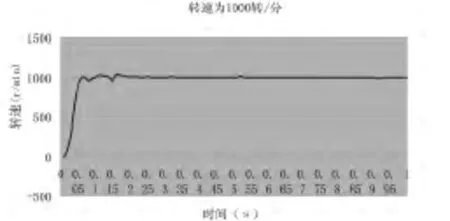
图3 转速=1000转/分的转速变化曲线图
由实验结果可见,采用复合控制的永磁无刷直流电机精密伺服系统响应快,运行平稳,具有较好的静、动态特性,跟踪性能优于传统PI控制下的伺服系统,取得了较为满意的效果,具有较好的实用价值.
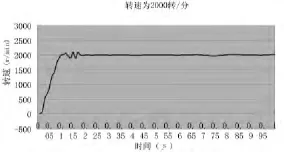
图4 转速=2000转/分的转速变化曲线图
[1]单宝钰.改进SVPWM供电技术的永磁同步电机控制研究[D].沈阳:沈阳工业大学硕士学位论文,2013.
[2]董昭.无刷直流电动机控制系统研究[D].西安:西安理工大学硕士学位论文,2007.
[3]韩彬.基于DSP F2812的无刷直流电机模糊控制系统的设计[D].南京:江苏大学硕士论文,2009.
[4]曹少泳,孟丹,程小华.基于DSP的无刷直流电动机双闭环控制程序软件设计[J].微电机,2007.
[5]李杰凤.基于Linux的操作系统实验平台的设计与实现[J].计算技术与自动化,2010.
[6]欧阳中盈.基于DSP的直流无刷电机控制系统研究[D].北京:北京交通大学硕士论文,2007.
[7]雷金莉.无刷直流电机模糊PI控制系统建模与仿真[J].现代电子技术,2012.
猜你喜欢
上海大中型电机(2021年2期)2021-07-21
防爆电机(2020年6期)2020-12-14
时代英语·高二(2017年4期)2017-08-11
解放军健康(2017年5期)2017-08-01
中国科技纵横(2015年2期)2015-11-05
科学中国人(2014年16期)2014-11-20
中国新技术新产品(2014年3期)2014-03-24
组合机床与自动化加工技术(2014年12期)2014-03-01
汽车电器(2014年8期)2014-02-28
赤峰学院学报·自然科学版(2012年19期)2012-10-14
